一种纯氢燃气轮机系统的控制方法和装置与流程
1.本技术涉及燃气轮机技术领域,尤其涉及一种纯氢燃气轮机系统的控制方法和装置。
背景技术:
2.可再生能源大多具有间歇性、波动性的缺点,难以满足电网负荷的需求。如图1所示一个供电流程:再生能源发电s111、电制氢s112、储氢s113和燃气轮机发电s114,即使用不稳定的可再生能源发电,制备氢燃料,再应用于纯氢燃气轮机,即可提供稳定可靠的电力。
3.与常用的天然气相比,使用可再生能源制备的“绿氢”作为燃气轮机的燃料,可以降低温室气体co2的排放。然而,氢气的密度、热值都低于天然气,导致向天然气中掺混氢气对co2减排的效果有限。例如,现有厂商生产的燃气轮机通常标称具有掺氢30%(按体积)的能力,但掺氢30%仅可减少约10%的co2排放。若要减少50%的co2排放,则掺氢比例需要达到80%。因此燃烧100%氢气的纯氢燃气轮机是目前技术发展的趋势。
4.氢气和天然气的燃烧性质具有很大的差别。氢气的层流火焰速度是ch4的10倍,可燃极限的上下限范围是ch4的5倍,在空气中的扩散系数是ch4的3倍,自燃温度比ch4低35℃,最小点燃能量仅为ch4的6%。由于氢气活跃的化学性质,燃烧过程较易发生回火、自点火的现象,热声振荡的特征和天然气燃料油较大的差别。这给纯氢燃气轮机的火焰稳定性控制带来很大的挑战。
技术实现要素:
5.本技术的目的旨在至少在一定程度上解决上述的技术问题之一。
6.为此,本发明的第一个目的在于提出一种纯氢燃气轮机系统的控制方法,先训练机器学习模型,然后在燃烧纯氢燃气轮机系统中,使用摄像机监控火焰形态图像,并基于训练后的模型判断火焰稳定性,根据输出结果启动稳焰程序,实现火焰稳定性的有效、自动控制。
7.本技术的第二个目的在于提出一种纯氢燃气轮机系统的控制装置。
8.本技术的第三个目的在于提出一种电子设备。
9.本技术的第四个目的在于提出一种计算机可读存储介质。
10.为达到上述目的,本技术第一方面实施例提出了一种纯氢燃气轮机系统的控制方法,包括:
11.获取燃气轮机分别在不同运行工况下的多个时刻的第一火焰形态图像以及多个时刻下对应的火焰稳定性评估值;
12.基于运行工况的工况参数、第一火焰形态图像以及火焰稳定性评估值训练燃气轮机机器学习模型;
13.获取燃气轮机在纯氢工况下的多个时刻的第二火焰形态图像,并基于燃气轮机机
器学习模型输出在纯氢工况下的火焰稳定性预测值;
14.判断火焰稳定性预测值是否低于火焰稳定性评估值;
15.如果火焰稳定性预测值低于火焰稳定性评估值,则启动稳焰程序。
16.可选的,方法还包括:
17.如果火焰稳定性预测值不低于火焰稳定性评估值,则保持纯氢工况燃烧。
18.可选的,基于运行工况的工况参数、第一火焰形态图像以及火焰稳定性评估值训练燃气轮机机器学习模型,包括:
19.将某一时刻的第一火焰形态图像转换为四维数组;
20.将工况参数、四维数组作为输入,火焰稳定性评估值作为输出,训练燃气轮机机器学习模型。
21.可选的,将某一时刻的第一火焰形态图像转换为四维数组,包括:
22.针对某一时刻,选取该时刻前固定间隔时间t的n张第一火焰形态图像;
23.将n张第一火焰形态图像转换为rgb格式的三元色图像,所述三元色图像大小为a*b像素;
24.用四维数组a*b*3*n表示三元色图像,其中,a*b表示像素,3表示三元色,n表示n张第一火焰形态图像。
25.可选的,工况参数包括燃气轮机负荷、燃料流率比例和燃料流率变化率。
26.可选的,燃气轮机机器学习模型包括卷积神经网络模型,将工况参数、四维数组作为输入,火焰稳定性评估值作为输出,训练燃气轮机机器学习模型,包括:
27.将四维数组输入卷积神经网络模型;
28.通过卷积神经网络模型的卷积层和池化层将输入的四维数组转换为一维数组;
29.将一维数组和工况参数合并,通过卷积神经网络模型的全连接层输出火焰稳定性评估值。
30.可选的,启动稳焰程序,包括:
31.以预定的速率持续增大燃料流率,并实时监控火焰稳定性预测值,直至火焰稳定性预测值达到预设数值。
32.可选的,方法还包括:
33.如果实时监控的火焰稳定性预测值降低或者预定时间内无上升趋势,则发出报警信息。
34.可选的,方法还包括:
35.在火焰稳定性预测值高于预设数值一定时间之后,减小燃料流率。
36.本技术实施例的一种纯氢燃气轮机系统的控制方法,在获取燃气轮机分别在不同运行工况下的多个时刻的第一火焰形态图像以及多个时刻下对应的火焰稳定性评估值后,基于运行工况的工况参数、第一火焰形态图像以及火焰稳定性评估值训练燃气轮机机器学习模型,而后获取燃气轮机在纯氢工况下的多个时刻的第二火焰形态图像,并基于燃气轮机机器学习模型输出在纯氢工况下的火焰稳定性预测值,而后判断火焰稳定性预测值是否低于火焰稳定性评估值,而如果火焰稳定性预测值低于火焰稳定性评估值,则启动稳焰程序,从而实现纯氢燃气轮机发电时,通过机器学习中的卷积神经网络模型,智能、高效地根据火焰形态图像,自动控制火焰的稳定性,避免火焰不稳定带来的跳机等问题,实现更加稳
定的供电状态。同时,使用纯氢作为燃气轮机的燃料,能够实现更加清洁的燃烧状态,降低温室气体的排放。
37.为达到上述目的,本技术第二方面实施例提出了一种纯氢燃气轮机系统的控制装置,包括:
38.获取模块,用于获取燃气轮机分别在不同运行工况下的多个时刻的第一火焰形态图像以及多个时刻下对应的火焰稳定性评估值;
39.训练模块,用于基于运行工况的工况参数、第一火焰形态图像以及火焰稳定性评估值训练燃气轮机机器学习模型;
40.预测模块,用于获取燃气轮机在纯氢工况下的多个时刻的第二火焰形态图像,并基于燃气轮机机器学习模型输出在纯氢工况下的火焰稳定性预测值;
41.判断模块,用于判断火焰稳定性预测值是否低于火焰稳定性评估值;
42.控制模块,用于如果火焰稳定性预测值低于火焰稳定性评估值,则启动稳焰程序。
43.可选的,控制模块还用于:
44.如果火焰稳定性预测值不低于火焰稳定性评估值,则保持纯氢工况燃烧。
45.可选的,训练模块用于:
46.将某一时刻的第一火焰形态图像转换为四维数组;
47.将工况参数、四维数组作为输入,火焰稳定性评估值作为输出,训练燃气轮机机器学习模型。
48.可选的,训练模块用于:
49.针对某一时刻,选取该时刻前固定间隔时间t的n张第一火焰形态图像;
50.将n张第一火焰形态图像转换为rgb格式的三元色图像,所述三元色图像大小为a*b像素;
51.用四维数组a*b*3*n表示三元色图像,其中,a*b表示像素,3表示三元色,n表示n张第一火焰形态图像。
52.可选的,工况参数包括燃气轮机负荷、燃料流率比例和燃料流率变化率。
53.可选的,燃气轮机机器学习模型包括卷积神经网络模型,训练模块用于:
54.将四维数组输入卷积神经网络模型;
55.通过卷积神经网络模型的卷积层和池化层将输入的四维数组转换为一维数组;
56.将一维数组和工况参数合并,通过卷积神经网络模型的全连接层输出火焰稳定性评估值。
57.可选的,控制模块用于:
58.以预定的速率持续增大燃料流率,并实时监控火焰稳定性预测值,直至火焰稳定性预测值达到预设数值。
59.可选的,控制模块还用于:
60.如果实时监控的火焰稳定性预测值降低或者预定时间内无上升趋势,则发出报警信息。
61.可选的,控制模块还用于:
62.在火焰稳定性预测值高于预设数值一定时间之后,减小燃料流率。
63.本技术实施例的一种纯氢燃气轮机系统的控制装置,在获取燃气轮机分别在不同
运行工况下的多个时刻的第一火焰形态图像以及多个时刻下对应的火焰稳定性评估值后,基于运行工况的工况参数、第一火焰形态图像以及火焰稳定性评估值训练燃气轮机机器学习模型,而后获取燃气轮机在纯氢工况下的多个时刻的第二火焰形态图像,并基于燃气轮机机器学习模型输出在纯氢工况下的火焰稳定性预测值,而后判断火焰稳定性预测值是否低于火焰稳定性评估值,而如果火焰稳定性预测值低于火焰稳定性评估值,则启动稳焰程序,从而实现纯氢燃气轮机发电时,通过机器学习中的卷积神经网络模型,智能、高效地根据火焰形态图像,自动控制火焰的稳定性,避免火焰不稳定带来的跳机等问题,实现更加稳定的供电状态。同时,使用纯氢作为燃气轮机的燃料,能够实现更加清洁的燃烧状态,降低温室气体的排放。
64.为达到上述目的,本技术第三方面实施例提出了电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时,实现本技术第一方面实施例的一种纯氢燃气轮机系统的控制方法。
65.为达到上述目的,本技术第四方面实施例提出了一种计算机可读存储介质,计算机程序被处理器执行时,实现本技术第一方面实施例的一种纯氢燃气轮机系统的控制方法。
66.本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
67.构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
68.图1出示了现有技术的燃气轮机发电的流程图;
69.图2出示了一个实施例的一种纯氢燃气轮机系统的控制方法的流程图;
70.图3出示了一个实施例的燃气轮机机器学习模型训练的流程图;
71.图4出示了一个实施例的燃气轮机机器学习模型中卷积神经网络模型训练的流程图;
72.图5出示了另一个实施例的一种纯氢燃气轮机系统的控制方法的流程图;
73.图6出示了又一个实施例的一种纯氢燃气轮机系统的控制方法的流程图;
74.图7出示了一个具体实施例的纯氢燃气轮机系统的结构示意图;
75.图8出示了一个具体实施例的机器学习模型训练过程的流程图;
76.图9出示了一个具体实施例的机器学习模型运行过程的流程图;
77.图10出示了一个具体实施例的稳焰过程的流程图;
78.图11出示了一个实施例的一种纯氢燃气轮机系统的控制装置的结构示意图。
具体实施方式
79.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
80.以下结合具体实施例对本发明作进一步详细描述,这些实施例不能理解为限制本发明所要求保护的范围。
81.下面参考附图描述本技术实施例的一种纯氢燃气轮机系统的控制方法和装置。
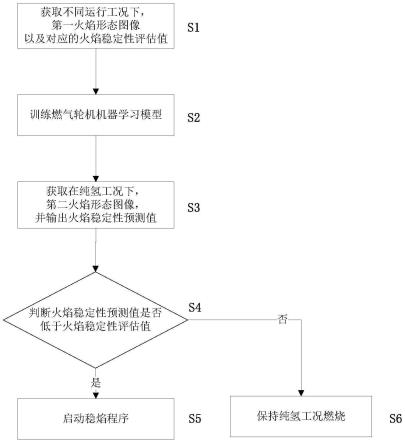
82.图2是本技术一个实施例的一种纯氢燃气轮机系统的控制方法的流程图,如图2所示,该方法包括以下步骤:
83.s1,获取燃气轮机分别在不同运行工况下的多个时刻的第一火焰形态图像以及多个时刻下对应的火焰稳定性评估值。
84.其中,运行工况是指设备在和其动作有直接关系的条件下的工作状态,本实施例中指的是燃气轮机的运行工况。运行工况可由燃气轮机负荷、燃料流率比例和燃料流率变化率等决定。
85.在一个实施例中,火焰稳定性评估值介于0-1之间,可基于操作人员的经验,或者根据历史数据得到。
86.s2,基于运行工况的工况参数、第一火焰形态图像以及火焰稳定性评估值训练燃气轮机机器学习模型。
87.其中,工况参数可包括燃气轮机负荷、燃料流率比例和燃料流率变化率。
88.具体地,如图3所示,燃气轮机机器学习模型训练进一步包含以下步骤:
89.s21:将某一时刻的第一火焰形态图像转换为四维数组。
90.具体地,针对某一时刻,选取该时刻前固定间隔时间t的n张第一火焰形态图像。而后,将n张第一火焰形态图像转换为rgb格式的三元色图像,所述三元色图像大小为a*b像素。最后,用四维数组a*b*3*n表示三元色图像。
91.其中,a*b表示像素,3表示三元色,n表示n张第一火焰形态图像。
92.s22:将工况参数、四维数组作为输入,火焰稳定性评估值作为输出,训练燃气轮机机器学习模型。
93.具体地,如图4所示,燃气轮机机器学习模型包括卷积神经网络模型,具体包括以下步骤:
94.s221:将四维数组输入卷积神经网络模型;
95.s222:通过卷积神经网络模型的卷积层和池化层将输入的四维数组转换为一维数组;
96.s223:将一维数组和工况参数合并,通过卷积神经网络模型的全连接层输出火焰稳定性评估值。
97.通过上述训练过程,在处理不同工况下的火焰形态图像后,能够得到最终的四维数组,再结合工况参数和火焰稳定性评估值以作为训练参数,能够训练模型适应多种不同工况,从而不断优化燃气轮机机器学习模型,准确、高效地处理火焰形态图像,完成火焰稳定性预测值的输出。
98.s3,获取燃气轮机在纯氢工况下的多个时刻的第二火焰形态图像,并基于燃气轮机机器学习模型输出在纯氢工况下的火焰稳定性预测值。
99.s4,判断火焰稳定性预测值是否低于火焰稳定性评估值。
100.通过上述机器学习模型执行过程,可在纯氢燃气轮机系统运行时,通过监控火焰形态图像,实时、智能、快速地输出预测值,以便及时、自动判断火焰稳定性,从而在出现不稳定情况时,能够有效执行稳焰程序。
101.s5,如果火焰稳定性预测值低于火焰稳定性评估值,则启动稳焰程序。
102.具体地,启动稳焰程序包括:以预定的速率持续增大燃料流率,并实时监控火焰稳定性预测值,直至火焰稳定性预测值达到预设数值。
103.如果火焰稳定性预测值低于评估值,则说明火焰不稳,可能会直接影响发电过程,造成供电不稳,所以需要实时监控,从而及时、智能、快速启动稳焰程序,避免因时间差而造成影响。
104.s6,如果火焰稳定性预测值不低于火焰稳定性评估值,则保持纯氢工况燃烧。
105.如果在纯氢工况下,火焰稳定性预测值不低于火焰稳定性评估值,则说明该工况下的火焰稳定,能够实现稳定供电,不需要启动稳焰程序。通过保持纯氢燃烧,可大幅降低温室气体的排放,实现清洁发电。
106.在本技术的另一个实施例中,如图5所示,方法还包括以下步骤:
107.s7,如果实时监控的火焰稳定性预测值降低或者预定时间内无上升趋势,则发出报警信息。
108.在启动稳焰程序之后,如果实时监控的火焰稳定性预测值降低或者预定时间内无上升趋势,说明稳焰程序没有起到明显的效果,所以发出报警信息。
109.在本技术的又一个实施例中,如图6所示,方法还包括以下步骤:
110.s8,在火焰稳定性预测值高于预设数值一定时间之后,减小燃料流率。
111.在启动稳焰程序之后,如果火焰稳定性预测值变高了,说明稳焰程序的达到了一定的稳焰效果,所以逐渐减小流率,让火焰在稳定的情况下,逐渐变成纯氢工况燃烧的状态。
112.通过上述稳焰程序,可在纯氢燃气轮机系统运行时,根据不同工况和极端情况,实时、高效、智能地执行高能动性的应对策略,避免火焰不稳带来的供电不稳等问题。
113.本技术实施例的一种纯氢燃气轮机系统的控制方法,在获取燃气轮机分别在不同运行工况下的多个时刻的第一火焰形态图像以及多个时刻下对应的火焰稳定性评估值后,基于运行工况的工况参数、第一火焰形态图像以及火焰稳定性评估值训练燃气轮机机器学习模型,而后获取燃气轮机在纯氢工况下的多个时刻的第二火焰形态图像,并基于燃气轮机机器学习模型输出在纯氢工况下的火焰稳定性预测值,而后判断火焰稳定性预测值是否低于火焰稳定性评估值,而如果火焰稳定性预测值低于火焰稳定性评估值,则启动稳焰程序,从而实现纯氢燃气轮机发电时,通过机器学习中的卷积神经网络模型,智能、高效地根据火焰形态图像,自动控制火焰的稳定性,避免火焰不稳定带来的跳机等问题,实现更加稳定的供电状态。同时,使用纯氢作为燃气轮机的燃料,能够实现更加清洁的燃烧状态,降低温室气体的排放。
114.下面以一个具体实施例来详细描述一种纯氢燃气轮机系统的控制方法。
115.其中,以图7的一种纯氢燃气轮机系统的控制方法中纯氢燃气轮机系统为例进行说明,其中该系统中的稳焰燃料为天然气/丙烷。稳焰燃料天然气和丙烷仅为示例。
116.具体地,纯氢燃气轮机系统可包括以下几个部分:氢气燃料系统110、氢气燃料调节装置120、天然气/丙烷燃料系统130、天然气/丙烷燃料调节装置140、外部控制系统150、压气机160、燃烧室170、透平180、燃气轮机系统230、摄像装置190、计算机210、稳焰控制系统220。
117.其中,
118.氢气燃料系统110,提供正常运行时使用的纯氢燃料;
119.氢气燃料调节装置120,控制氢气燃料的流率;
120.天然气/丙烷燃料系统130,在出现火焰不稳定状况时提供稳焰燃料;
121.天然气/丙烷燃料调节装置140,控制天然气/丙烷燃料的流率;
122.外部控制系统150,根据电力需求变化等参数控制氢气燃料调节装置120和天然气/丙烷燃料调节装置140增加或减少流率;
123.燃气轮机系统230,由压气机160、燃烧室170和透平180共同组成。具体地,压气机160从外界大气吸入空气,压缩后送入燃烧室170,燃烧室170通过氢气燃料调节装置120和天然气/丙烷燃料调节装置140获得燃料,与压缩空气混合燃烧,生成高温高压气体,再进入透平180膨胀做功发电。其中,空气压缩过程为近似绝热压缩,燃烧过程为近似等压膨胀,燃气膨胀过程为近似绝热膨胀过程。摄像装置190,安装在燃烧室170上开设的通孔或观察窗处,拍摄燃烧室内的火焰图像;
124.计算机210,对摄像装置190获取的图像序列进行处理;
125.稳焰控制系统220,根据计算机210的计算结果向氢气燃料调节装置120和天然气/丙烷燃料调节装置140发出信号,控制氢气燃料调节装置120和天然气/丙烷燃料调节装置140增加或减少氢气、天然气/丙烷流率。
126.具体地,本实施例包括前期的训练过程和后期的运行过程两部分。
127.其中,训练过程断开计算机210对稳焰控制系统220的输出,稳焰控制系统220为手动控制状态。
128.如图8所示,具体包括以下步骤:
129.s801:调节氢气燃料装置。
130.具体地,通过外部控制系统150调节氢气燃料调节装置120,使燃气轮机系统中的压气机116、燃烧室117和透平118开始运行。
131.s802:改变燃料流率。
132.其中,运行工况可包括燃气轮机负荷、天然气/丙烷燃料流率比例、天然气/丙烷燃料流率变化率等。
133.具体地,通过外部控制系统150和稳焰控制系统220改变流率,从而改变燃气轮机的运行工况。
134.s803:获取机器学习模型训练的输入和输出。
135.具体地,通过计算机210收集各时刻摄像装置190拍摄得到的火焰形态图像,以及s802工况参数,作为训练输入。
136.同时,通过摄像装置190观察燃烧室内火焰稳定性,得出各时刻评估值,作为训练输出。其中,火焰稳定性评估值介于0-1之间,可基于操作人员的经验,或者根据历史数据得到。
137.在天然气/丙烷燃料流率发生变化时,火焰稳定性的评估应去除该流率变化的影响。
138.s804:处理火焰形态图像。
139.具体地,将火焰图像转换为rgb格式,图像大小转换为a*b像素,组合成为a*b*3*n的4维数组。
140.其中,a*b表示像素,3表示三元色,n表示n张第一火焰形态图像。
141.s805:建立并训练机器学习模型。
142.具体地,使用s804获取的4维数组和工况参数(燃机负荷、天然气/丙烷燃料流率比例及变化率)作为输入,火焰稳定性评估值作为输出。
143.机器学习模型的一种实施方式是使用卷积神经网络模型,首先输入的4维数组通过若干卷积层、池化层,提取特征并降低大小,然后转换为1维数组后,与工况参数合并,通过1个或多个全连接层生成单个稳定性评估值输出。
144.而后的运行过程中,计算机210与稳焰控制系统220相连,计算机210的输出稳焰控制系统220自动控制。
145.如图9所示,具体包括以下步骤:
146.s901:关闭天然气/丙烷燃料调节装置。
147.具体地,计算机210使天然气/丙烷燃料调节装置140完全关闭,不使用天然气/丙烷燃料。
148.s902:调节氢气燃料调节装置。
149.具体地,外部控制系统150根据需要对氢气燃料调节装置120进行调节,使燃气轮机系统中的压气机160、燃烧室170和透平180以一定负荷运行。
150.s903:通过机器学习模型获取火焰稳定性预测值。
151.具体地,摄像装置190持续拍摄燃烧室170内的火焰图像,输入计算机210。计算机210实时以相同方法将间隔t时间的n张图像处理为a*b*3*n的4维数组作为参数。同时,氢气燃料调节装置120和天然气/丙烷燃料调节装置140向计算机210反馈运行工况作为参数。然后,将数组和工况参数代入机器学习模型,得到火焰稳定性预测值。
152.s904:启动稳焰过程。
153.具体地,当s903得出的火焰稳定性预测值低于一定限值时,向稳焰控制系统220发出信号,启动稳焰过程。
154.如图10所示,具体步骤如下:
155.s1001,改善燃烧稳定性。
156.具体地,稳焰控制系统220接收到信号后,以给定的速率持续增大天然气/丙烷燃料调节装置140的流率,使天然气/丙烷燃料注入燃烧室,改善燃烧稳定性。
157.s1002,监控火焰稳定性预测值的变化。
158.具体地,过程中计算机210的机器学习模型使用实时更新的流率比例、变化率持续运行,监控火焰稳定性预测值的变化。
159.s1003,判断预测值是否持续降低,或在给定时间无上升趋势。
160.具体地,如果火焰稳定性预测值持续降低,或在给定时间内无上升趋势,则表明该问题无法通过天然气/丙烷燃料解决,则进入s1004,发出警报信号要求操作员使用其他方法调节;如果火焰稳定性预测值没有持续降低,并在给定时间内有上升趋势,则表明该问题可以通过天然气/丙烷燃料解决,则进入s1005。
161.s1005,稳焰控制系统调整燃料控制策略。
162.具体地,稳焰控制系统210在天然气/丙烷燃料比例达到设定值,或火焰稳定性预测值高于一定限值时,停止增加天然气/丙烷调节装置140的流率。直至火焰稳定性预测值
在高于限值的水平维持一定时间后,开始减小天然气/丙烷调节装置140的流率。
163.s1006,判断火焰稳定性预测值是否降低。
164.具体地,s1005过程中计算机210仍需实时监控燃烧室170。如果出现火焰稳定性预测值降低的情况,则进入s1007,发出信号停止减小流率,直至预测值恢复较高水平;如果没有出现火焰稳定性预测值降低的情况,则进入s1008,将天然气/丙烷调节装置140的流率减小至0,不再使用天然气/丙烷燃料,系统恢复使用纯氢燃料的正常运行状态。
165.本发明在燃烧纯氢的燃气轮机发电系统中,使用摄像机检测火焰状态,使用机器学习模型判断火焰稳定性状态,根据输出结果间歇向燃烧室加入天然气/丙烷,从而自动控制天然气/丙烷燃料流率,提高纯氢燃气轮机中火焰稳定性,实现火焰稳定性的有效、自动控制。
166.为了实现上述实施例,本技术还提出一种纯氢燃气轮机系统的控制装置。
167.图11是本技术一个实施例的一种纯氢燃气轮机系统的控制装置的结构示意图。
168.如图11所示,一种纯氢燃气轮机系统的控制装置包括获取模块100、训练模块200、预测模块300、判断模块400、控制模块500。
169.获取模块100,用于获取燃气轮机分别在不同运行工况下的多个时刻的第一火焰形态图像以及多个时刻下对应的火焰稳定性评估值。
170.训练模块200,用于基于运行工况的工况参数、第一火焰形态图像以及火焰稳定性评估值训练燃气轮机机器学习模型。
171.具体地,工况参数包括燃气轮机负荷、燃料流率比例和燃料流率变化率。
172.训练模块200,具体用于:将某一时刻的第一火焰形态图像转换为四维数组;将工况参数、四维数组作为输入,火焰稳定性评估值作为输出,训练燃气轮机机器学习模型。
173.训练模块200,还用于:针对某一时刻,选取该时刻前固定间隔时间t的n张第一火焰形态图像;将n张第一火焰形态图像转换为rgb格式的三元色图像,所述三元色图像大小为a*b像素;用四维数组a*b*3*n表示三元色图像,其中,a*b表示像素,3表示三元色,n表示n张第一火焰形态图像。
174.燃气轮机机器学习模型包括卷积神经网络模型。训练模块112还用于:将四维数组输入卷积神经网络模型;通过卷积神经网络模型的卷积层和池化层将输入的四维数组转换为一维数组;将一维数组和工况参数合并,通过卷积神经网络模型的全连接层输出火焰稳定性评估值。
175.预测模块300,用于获取燃气轮机在纯氢工况下的多个时刻的第二火焰形态图像,并基于燃气轮机机器学习模型输出在纯氢工况下的火焰稳定性预测值。
176.判断模块400,用于判断火焰稳定性预测值是否低于火焰稳定性评估值。
177.控制模块500,用于如果火焰稳定性预测值低于火焰稳定性评估值,则启动稳焰程序。
178.控制模块500,具体用于:以预定的速率持续增大燃料流率,并实时监控火焰稳定性预测值,直至火焰稳定性预测值达到预设数值。
179.在本技术的另一个实施例中,控制模块500,还用于:如果实时监控的火焰稳定性预测值降低或者预定时间内无上升趋势,则发出报警信息。
180.在本技术的又一个实施例中,控制模块500,还用于:在火焰稳定性预测值高于预
设数值一定时间之后,减小燃料流率。
181.应当理解的是,一种纯氢燃气轮机系统的控制装置与其对应的一种纯氢燃气轮机系统的控制方法实施例描述一致,故本实施例中不再赘述。
182.本技术实施例的一种纯氢燃气轮机系统的控制装置,在获取燃气轮机分别在不同运行工况下的多个时刻的第一火焰形态图像以及多个时刻下对应的火焰稳定性评估值后,基于运行工况的工况参数、第一火焰形态图像以及火焰稳定性评估值训练燃气轮机机器学习模型,而后获取燃气轮机在纯氢工况下的多个时刻的第二火焰形态图像,并基于燃气轮机机器学习模型输出在纯氢工况下的火焰稳定性预测值,而后判断火焰稳定性预测值是否低于火焰稳定性评估值,而如果火焰稳定性预测值低于火焰稳定性评估值,则启动稳焰程序,从而实现纯氢燃气轮机发电时,通过机器学习中的卷积神经网络模型,智能、高效地根据火焰形态图像,自动控制火焰的稳定性,避免火焰不稳定带来的跳机等问题,实现更加稳定的供电状态。同时,使用纯氢作为燃气轮机的燃料,能够实现更加清洁的燃烧状态,降低温室气体的排放。
183.为了实现上述实施例,本技术还提出了一种计算机设备。
184.该计算机设备包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时,实现如第一方面实施例的一种纯氢燃气轮机系统的控制方法。
185.为了实现上述实施例,本技术还提出了一种计算机可读存储介质。
186.该计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现如第一方面实施例的一种纯氢燃气轮机系统的控制方法。
187.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
188.在流程图中表示或在此以其他方式描述的逻辑和/或步骤,例如,可以被认为是用于实现逻辑功能的可执行指令的定序列表,可以具体实现在任何计算机可读介质中,以供指令执行系统、装置或设备(如基于计算机的系统、包括处理器的系统或其他可以从指令执行系统、装置或设备取指令并执行指令的系统)使用,或结合这些指令执行系统、装置或设备而使用。就本说明书而言,"计算机可读介质"可以是任何可以包含、存储、通信、传播或传输程序以供指令执行系统、装置或设备或结合这些指令执行系统、装置或设备而使用的装置。计算机可读介质的更具体的示例(非穷尽性列表)包括以下:具有一个或多个布线的电连接部(电子装置),便携式计算机盘盒(磁装置),随机存取存储器(ram),只读存储器(rom),可擦除可编辑只读存储器(eprom或闪速存储器),光纤装置,以及便携式光盘只读存储器(cdrom)。另外,计算机可读介质甚至可以是可在其上打印程序的纸或其他合适的介质,因为可以例如通过对纸或其他介质进行光学扫描,接着进行编辑、解译或必要时以其他合适方式进行处理来以电子方式获得程序,然后将其存储在计算机存储器中。
189.应当理解,本技术的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,多个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。例如,如果用硬件来实现,和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列(fpga)等。
190.需要说明的是,在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1