基于BEST小汽轮机的旁路阀调节控制系统的制作方法
基于best小汽轮机的旁路阀调节控制系统
技术领域
1.本技术涉及超超临界二次再热燃煤机组best小汽轮机带小发电机的智能控制领域,尤其涉及一种基于best小汽轮机的旁路阀调节控制系统。
背景技术:
2.旁路阀在应用于汽轮机中的主要体现包括,第一点是汽轮机处于冷态,温态和热态时,旁路系统能实现机组的最优启动和停机,按汽轮机运行工况,启停曲线要求,能满足自动和手动两种运行方式,配合锅炉建立与汽轮机组成相适应的蒸汽温度,缩短机组的启动时间。第二点是在汽轮机跳闸时,旁路系统能快速度动作,达到全开位置。第三点是在汽轮机负荷变化时,旁路系统具有调节功能,在运动状态瞬时变化时,能避免安全阀动作,提高运行稳定性。
3.best小汽轮机带小发电机具有高效节能等优点,已成功应用于热力发电厂的实际生产中。所以,针对best小汽轮机带小发电机自身独特的运行特点,设计一种基于best小汽轮机的旁路阀调节控制系统成为当前亟需解决的问题。
技术实现要素:
4.为了解决上述问题,本技术提供了一种基于best小汽轮机的旁路阀调节控制系统。
5.根据本技术的一方面,提供了一种基于best小汽轮机的旁路阀调节控制系统,包括:
6.模拟量手操器单元,用于根据各输入端的输入数据,输出best小汽轮机旁路阀的阀位指令;所述模拟量手操器单元包括x输入端、tr输入端、ts输入端、tom输入端、reqa输入端和信号输出端;
7.运行工况状态识别单元,用于根据所述best小汽轮机顺控启动的执行进度和所述旁路阀的阀位,输出用于表示所述best小汽轮机是否处于顺控启动第19步,以及所述旁路阀的阀位是否小于预设阀位阈值的信号;
8.自动指令输出单元,用于根据机组的运行状态数据和所述运行工况状态识别单元的输出信号,输出所述旁路阀处于自动操作状态时的阀位指令;所述运行工况状态识别单元的输出端与所述自动指令输出单元的输入端连接;所述自动指令输出单元的输出端与所述模拟量手操器单元的x输入端连接;
9.跟踪状态识别单元,用于根据所述best小汽轮机的运行状态及所述旁路阀的状态,输出用于表示所述旁路阀是否处于跟踪状态的信号;跟踪状态识别单元包括best小汽轮机跳闸信号输出子单元;所述跟踪状态识别单元的输出端与所述模拟量手操器单元的ts输入端连接;
10.第一常数单元,用于设定所述旁路阀处于跟踪状态时对应的跟踪值;所述第一常数单元的输出端与所述模拟量手操器单元的tr输入端连接;
11.手动状态识别单元,用于根据所述运行工况状态识别单元的输出信号和所述best小汽轮机跳闸信号输出子单元的输出信号,输出用于表示所述旁路阀是否处于手动操作状态的信号;所述手动状态识别单元的输出端与所述模拟量手操器单元的tom输入端连接;
12.自动状态识别单元,用于根据所述best小汽轮机顺控启动进度和汽源切换完成情况,输出用于表示所述旁路阀是否处于自动操作状态的信号;所述自动状态识别单元的输出端与所述模拟量手操器单元的reqa输入端连接;
13.best小汽轮机旁路阀的阀位指令的模拟量信号输出单元与所述模拟量手操器单元的信号输出端连接。
14.在本技术的一些实施例中,所述运行工况状态识别单元包括best小汽轮机顺控启动第19步的开关量信号输入模块、best小汽轮机旁路阀的阀位模拟量信号输入模块、比较小于模块和第一与模块;其中:
15.所述best小汽轮机旁路阀的阀位模拟量信号输入模块与所述比较小于模块的输入端连接;所述best小汽轮机顺控启动第19步的开关量信号输入模块和所述比较小于模块的输出端均与所述第一与模块的输出端连接。
16.在本技术的一些实施例中,所述自动指令输出单元包括旁路阀pid调节模块输出子单元、常数模块和模拟量切换选择模块;其中:
17.所述旁路阀pid调节模块输出子单元的输出端与所述模拟量切换选择模块的第一输入端连接;所述常数模块的输出端与所述模拟量切换选择模块的第二输入端连接;所述运行工况状态识别单元的输出端与所述模拟量切换选择模块的en输入端连接。
18.作为一种可能的实施方式,所述旁路阀pid调节模块输出子单元包括best小汽轮机第一排汽压力的模拟量信号输入模块、best小汽轮机延时背压设定值的模拟量信号输入模块、旁路阀的第一阀位控制手动模式的开关量信号输入模块、best小汽轮机末级压比设定值的模拟量信号输入模块、best小汽轮机第二排汽压力的模拟量信号输入模块、旁路阀的第二阀位控制手动模式的开关量信号输入模块、best小汽轮机顺控启动运行中的开关量信号输入模块、七号低压加热器切除的开关量信号输入模块、八号低压加热器切除的第一开关量信号输入模块、best小汽轮机旁路阀全关的开关量信号输入模块、旁路阀的第三阀位控制手动模式的开关量信号输入模块、八号低压加热器切除的第二开关量信号输入模块、best小汽轮机跳闸的开关量信号输入模块、best小汽轮机旁路阀的阀位的模拟量信号输入模块、旁路阀快开电磁阀带电指令,旁路阀未在手动模式的开关量信号输入模块、旁路阀的第四阀位控制手动模式的开关量信号输入模块、best旁路阀位启机背压控制kp的模拟量信号输入模块、best旁路阀位7级抽汽切除压比控制kp的模拟量信号输入模块、best旁路阀位启机背压控制ti的模拟量信号输入模块、best旁路阀位7级抽汽切除压比控制ti的模拟量信号输入模块、旁路阀pid调节模块输出值的模拟量信号输出模块、第一模拟量切换选择模块、第二模拟量切换选择模块、第三模拟量切换选择模块、第四模拟量切换选择模块、第五模拟量切换选择模块、第一减法模块、第二减法模块、第一乘法模块、第二乘法模块、第一非模块、第二非模块、第一与模块、第二与模块、rs触发器模块、第一或模块、第二或模块、第一常数模块、第二常数模块、pid调节模块;其中:
19.所述best小汽轮机延时背压设定值的模拟量信号输入模块与所述第一模拟量切换选择模块的第一输入端连接,所述best小汽轮机第一排汽压力的模拟量信号输入模块与
所述第一模拟量切换选择模块的第二输入端连接,所述旁路阀的第一阀位控制手动模式的开关量信号输入模块与所述第一模拟量切换选择模块的en输入端连接,所述best小汽轮机第一排汽压力的模拟量信号输入模块与所述第一减法模块的第一输入端连接,所述第一模拟量切换选择模块的输出端与所述第一减法模块的第二输入端连接,所述第一减法块的输出端与所述第一乘法模块的输入端连接;
20.所述best小汽轮机末级压比设定值的模拟量信号输入模块与所述第二模拟量切换选择模块的第一输入端连接,所述best小汽轮机第二排汽压力的模拟量信号输入模块与第二模拟量切换选择模块的第二输入端连接,所述旁路阀的第二阀位控制手动模式的开关量信号输入模块与所述第二模拟量切换选择模块的en输入端连接,所述第二模拟量切换选择模块的输出端与所述第二减法模块的第一输入端连接,所述best小汽轮机第二排汽压力的模拟量信号输入模块与所述第二减法模块的第二输入端连接;第二减法模块的输出端与所述第二乘法模块的输入端连接;
21.所述best小汽轮机顺控启动运行中的开关量信号输入模块与所述第一非模块的输入端连接,所述第一非模块的输出端、所述七号低压加热器切除的开关量信号输入模块和所述八号低压加热器切除的第一开关量信号输入模块均与所述第一与模块的输入端连接;所述第一与模块的输出端与所述rs触发器模块的s输入端连接;
22.所述八号低压加热器切除的第二开关量信号输入模块与所述第二非模块的输入端连接,所述第二非模块的输出端、所述best小汽轮机旁路阀全关的开关量信号输入模块和所述旁路阀的第三阀位控制手动模式的开关量信号输入模块均与所述第二与模块的输入端连接,所述第二与模块的输出端和所述best小汽轮机跳闸的开关量信号输入模块均与所述第一或模块的输入端连接;所述第一或模块的输出端与所述rs触发器的r输入端连接;
23.所述第一乘法模块的输出端与所述第三模拟量切换选择模块的第一输入端连接,所述第二乘法模块的输出端与所述第三模拟量切换选择模块的第二输入端连接,所述rs触发器模块的dv输出端与所述第三模拟量切换选择模块的en输入端连接,所述第三模拟量切换选择模块的输出端与所述pid调节模块的e输入端连接;
24.所述第一常数模块与所述pid调节模块的h输入端连接;所述第二常数模块与所述pid调节模块的l输入端连接;所述best小汽轮机旁路阀的阀位的模拟量信号输入模块与所述pid调节模块的tr输入端连接;所述旁路阀快开电磁阀带电指令,旁路阀未在手动模式的开关量信号输入模块和所述旁路阀的第四阀位控制手动模式的开关量信号输入模块均与所述第二或模块的输入端连接,所述第二或模块的输出端与所述pid调节模块的ts输入端连接;
25.所述best旁路阀位启机背压控制kp的模拟量信号输入模块与所述第四模拟量切换选择模块的第一输入端连接,所述best旁路阀位7级抽汽切除压比控制kp的模拟量信号输入模块与所述第四模拟量切换选择模块的第二输入端连接,所述rs触发器模块的dv输出端与所述第四模拟量切换模块的en输入端连接,所述第四模拟量切换模块的输出端与所述pid调节模块的kp输入端连接;所述best旁路阀位启机背压控制ti的模拟量信号输入模块与所述第五模拟量切换选择模块的第一输入端连接,所述best旁路阀位7级抽汽切除压比控制ti的模拟量信号输入模块与所述第五模拟量切换选择模块的第二输入端连接,所述rs触发器模块的dv输出端与所述第五模拟量切换模块的en输入端连接,所述第五模拟量切换
模块的输出端与所述pid调节模块的ki输入端连接;
26.所述pid调节模块的输出端与所述旁路阀pid调节模块输出值的模拟量信号输出模块连接。
27.在本技术的一些实施例中,所述跟踪状态识别单元包括best小汽轮机轴封系统顺控启动指令的开关量信号输入模块、best小汽轮机顺控启动第8步的开关量信号输入模块、旁路阀快开电磁阀带电指令的开关量信号输入模块、best小汽轮机跳闸的开关量信号输入模块、第一脉冲模块、第二脉冲模块、第三脉冲模块和第一或模块;其中:
28.所述best小汽轮机轴封系统顺控启动指令的开关量信号输入模块与所述第一脉冲模块的输入端连接,所述best小汽轮机顺控启动第8步的开关量信号输入模块与所述第二脉冲模块的输入端连接,所述best小汽轮机跳闸的开关量信号输入模块与所述第三脉冲模块的输入端连接,所述第一脉冲模块的输出端、所述第二脉冲模块的输出端、所述旁路阀快开电磁阀带电指令的开关量信号输入模块和所述第三脉冲模块的输出端均与所述第一或模块的输入端连接,所述第一或模块的输出端与所述模拟量手操器单元的ts输入端连接;
29.所述best小汽轮机跳闸信号输出子单元中包括所述best小汽轮机跳闸的开关量信号输入模块和所述第三脉冲模块。
30.作为一种可能的实施方式,所述手动状态识别单元包括延时关模块、延时开模块和第二或模块;其中:
31.所述延时关模块的输入端与所述运行工况状态识别单元的输出端连接,所述延时关模块的输出端与所述延时开模块的输入端连接,所述延时开模块的输出端和所述best小汽轮机跳闸信号输出子单元的输出端均与所述第二或模块的输入端连接,所述第二或模块的输出端与所述模拟量手操器单元的tom输入端连接。
32.在本技术的一些实施例中,所述自动状态识别单元包括best小汽轮机汽源切换完成的开关量信号输入模块、best小汽轮机顺控启动第16步的开关量信号输入模块、第二与模块和第四脉冲模块;其中:
33.所述best小汽轮机汽源切换完成的开关量信号输入模块和所述best小汽轮机顺控启动第16步的开关量信号输入模块均与所述第二与模块的输入端连接,所述第二与模块的输出端与所述第四脉冲模块的输入端连接,所述第四脉冲模块的输出端与所述模拟量手操器单元的reqa输入端连接。
34.在本技术的一些实施例中,所述模拟量手操器单元还包括maxout输入端和minout输入端;所述系统还包括:
35.第二常数单元,用于设定所述模拟量手操器单元输出的高限值;所述第二常数单元的输出端与所述模拟量手操器单元的maxout输入端连接;
36.第三常数单元,用于设定所述模拟量手操器单元输出的低限值;所述第三常数单元的输出端与所述模拟量手操器单元的minout输入端连接。
37.根据本技术的技术方案,由自动状态识别单元、跟踪状态识别单元和手动状态识别单元来结合不同工况,确定best小汽轮机旁路阀的控制状态,并通过模拟量手操器单元根据旁路阀的控制状态,输出对应的best小汽轮机旁路阀的阀位指令,以实时调节旁路阀的阀位。该系统可以完全适用于best小汽轮机带小发电机的设备,使在启动和运行期间的
旁路阀调节处于全自动状态,以保证机组的安全正常运行。
38.本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
39.本技术上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
40.图1为本技术实施例中best小汽轮机带发电机的结构框图;
41.图2为本技术实施例提供的一种基于best小汽轮机的旁路阀调节控制系统的结构框图;
42.图3为本技术实施例提供的另一种基于best小汽轮机的旁路阀调节控制系统的结构框图;
43.图4为本技术实施例中的旁路阀pid调节模块输出子单元的结构框图;
44.图5为本技术实施例中的best小汽轮机负荷与背压设定值的对应关系示意图;
45.图6为本技术实施例中的best小汽轮机实际转速与末级压比设定值的对应关系示意图。
46.附图标记:
47.best小汽轮机,101;发电机,102;变流器,103;一号主汽门,v01;二号主汽门,v02;一号主汽调节门,v03;二号主汽调节门,v04;七号抽逆止阀,v05;七号抽汽电动阀,v06;溢流阀管道截止阀,v07;旁路阀,v08;补汽阀,v09;溢流阀,v10。
具体实施方式
48.下面详细描述本技术的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。
49.需要说明的是,旁路阀在应用于汽轮机中的主要体现包括,第一点是汽轮机处于冷态,温态和热态时,旁路系统能实现机组的最优启动和停机,按汽轮机运行工况,启停曲线要求,能满足自动和手动两种运行方式,配合锅炉建立与汽轮机组成相适应的蒸汽温度,缩短机组的启动时间。第二点是在汽轮机跳闸时,旁路系统能快速度动作,达到全开位置。第三点是在汽轮机负荷变化时,旁路系统具有调节功能,在运动状态瞬时变化时,能避免安全阀动作,提高运行稳定性。
50.best小汽轮机带小发电机具有高效节能等优点,已成功应用于热力发电厂的实际生产中。所以,针对best小汽轮机带小发电机自身独特的运行特点,设计一种基于best小汽轮机的旁路阀调节控制系统成为当前亟需解决的问题。
51.为了解决上述问题,本技术提供了一种基于best小汽轮机的旁路阀调节控制系统。
52.需要说明的是,如图1所示,best小汽轮机101通过传动轴与发电机102连接,发电机102与变流器103连接,best小汽轮机101通过两个蒸汽输入管路与蒸汽气源连接,其中一个蒸汽输入管路上安装有一号主汽门v01和一号主汽调节门v03,另一个蒸汽输入管路上安
装有二号主汽门v02和二号主汽调节门v04。best小汽轮机101的七号抽汽出口通过管路依次连接七号抽逆止阀v05、七号抽汽电动阀v06和排汽集箱104,排汽集箱104分别通过管路连接蒸汽汽源、凝汽器、八号低加、七号低加,排汽集箱104与八号低加之间的管路上连接有溢流阀管道截止阀v07和溢流阀v10,排汽集箱104与凝汽器之间的管路上连接有旁路阀v08,排汽集箱104与蒸汽汽源之间的管路上连接有补汽阀v09。
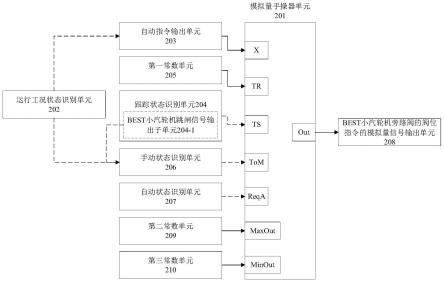
53.图2为本技术实施例提供的一种基于best小汽轮机的旁路阀调节控制系统的结构框图。如图2所示,该系统包括:模拟量手操器单元201、运行工况状态识别单元202、自动指令输出单元203、跟踪状态识别单元204、第一常数单元205、手动状态识别单元206、自动状态识别单元207和best小汽轮机旁路阀的阀位指令的模拟量信号输出单元208。
54.在本技术的一些实施例中,模拟量手操器单元201用于根据各输入端的输入数据,输出best小汽轮机旁路阀的阀位指令。模拟量手操器单元201包括x输入端、tr输入端、ts输入端、tom输入端、reqa输入端和信号输出端。
55.运行工况状态识别单元202,用于根据best小汽轮机顺控启动的执行进度和旁路阀的阀位,输出用于表示best小汽轮机是否处于顺控启动第19步,以及旁路阀的阀位是否小于预设阀位阈值的信号。其中,best小汽轮机顺控启动第19步为best旁路阀小于3%时,旁路阀自动关闭,并切为手动。
56.自动指令输出单元203,用于根据机组的运行状态数据和运行工况状态识别单元202的输出信号,输出旁路阀处于自动操作状态时的阀位指令。运行工况状态识别单元202的输出端与自动指令输出单元203的输入端连接。自动指令输出单元203的输出端与模拟量手操器单元201的x输入端连接。
57.跟踪状态识别单元204,用于根据best小汽轮机的运行状态及旁路阀的状态,输出用于表示旁路阀是否处于跟踪状态的信号。跟踪状态识别单元204包括best小汽轮机跳闸信号输出子单元204-1。跟踪状态识别单元204的输出端与模拟量手操器单元201的ts输入端连接。
58.第一常数单元205,用于设定旁路阀处于跟踪状态时对应的跟踪值。第一常数单元205的输出端与模拟量手操器单元201的tr输入端连接。作为一种示例,第一常数单元205设定的跟踪值为100,若模拟量手操器单元201的ts输入端的为1,则模拟量手操器单元201输出信号为跟踪值,即best小汽轮机旁路阀的阀位指令的模拟量信号输出单元208输出的阀位指令的模拟量信号为控制旁路阀的阀位为100的阀位指令。
59.手动状态识别单元206,用于根据运行工况状态识别单元202的输出信号和best小汽轮机跳闸信号输出子单元204-1的输出信号,输出用于表示旁路阀是否处于手动操作状态的信号。手动状态识别单元206的输出端与模拟量手操器单元201的tom输入端连接。若模拟量手操器单元201的tom输入端接收到高电平信号,则旁路阀的控制状态为手动操作状态,即说明模拟量手操器单元201为手动操作状态,所以模拟量手操器单元201的输出信号基于旁路阀的手动操作信号来确定。
60.自动状态识别单元207,用于根据best小汽轮机顺控启动进度和汽源切换完成情况,输出用于表示旁路阀是否处于自动操作状态的信号。自动状态识别单元207的输出端与模拟量手操器单元201的reqa输入端连接。若自动状态识别单元207输出的信号表示旁路阀处于自动操作状态,即模拟量手操器单元201的reqa输入端接收到旁路阀处于自动操作状
态的信号,则模拟量手操器单元201的输出信号为x输入端接收到的信号,即模拟量手操器单元201的输出信号为自动指令输出单元203的输出信号。
61.best小汽轮机旁路阀的阀位指令的模拟量信号输出单元208与模拟量手操器单元201的信号输出端连接。
62.此外,模拟量手操器单元201还包括maxout输入端和minout输入端。该系统还可以包括第二常数单元209和第三常数单元210。其中,第二常数单元209用于设定模拟量手操器单元201输出的高限值。第二常数单元的输出端与模拟量手操器单元的maxout输入端连接。第三常数单元210用于设定模拟量手操器单元输出的低限值。第三常数单元的输出端与模拟量手操器单元的minout输入端连接。作为一种示例,第二常数单元209设定的模拟量手操单元201输出的高限值为100,第三常数单元210设定的模拟量手操单元201输出的低限值为0。
63.在本技术的一些实施例中,如图3所示,运行工况状态识别单元202包括best小汽轮机顺控启动第19步的开关量信号输入模块301、best小汽轮机旁路阀的阀位模拟量信号输入模块302、比较小于模块303和第一与模块304。其中,best小汽轮机旁路阀的阀位模拟量信号输入模块302与比较小于模块303的输入端连接。best小汽轮机顺控启动第19步的开关量信号输入模块301和比较小于模块303的输出端均与第一与模块304的输出端连接。比较小于模块303中预设有阀位阈值,并将best小汽轮机旁路阀的阀位模拟量信号输入模块302输出的best小汽轮机旁路阀的阀位模拟量信号与预设阀位阈值进行比对,比如比较小于模块303中预设阀位阈值为3%,若旁路阀的阀位小于3%,则比较小于模块303输出高电平信号,否则输出低电平信号。此外,若best小汽轮机顺控启动第19步的开关量信号输入模块301和比较小于模块303输出均为高电平信号,则第一与模块304输出高电平信号,否则第一与模块304输出低电平信号。也就是说,若best小汽轮机顺控启动第19步的信号触发,且best小汽轮机旁路阀的阀位小于3%,则运行工况状态识别单元202输出高电平信号,否则输出低电平信号。
64.如图3所示,自动指令输出单元203中可以包括旁路阀pid调节模块输出子单元305、常数模块306和模拟量切换选择模块307。其中,旁路阀pid调节模块输出子单元305的输出端与模拟量切换选择模块307的第一输入端连接。常数模块306的输出端与模拟量切换选择模块307的第二输入端连接。运行工况状态识别单元202的输出端与模拟量切换选择模块307的en输入端连接。也就是说,第一与模块304的输出端与模拟量切换选择模块307的en输入端连接。其中,常数模块306中的预设值为0,即旁路阀关闭。若第一与模块304的输出端的信号为0,即模拟量切换选择模块307的en输入端的信号为0,则模拟量切换选择模块307的输出为旁路阀pid调节模块输出子单元305的输出值。若第一与模块304的输出端的信号为1,即模拟量切换选择模块307的en输入端的信号为1,则模拟量切换选择模块307的输出为常数模块306中的设定值。
65.也就是说,若best小汽轮机顺控启动第19步或best小汽轮机旁路阀的阀位小于预设阀位阈值中任一条件未触发,则模拟量切换选择模块307的输出为旁路阀pid调节模块输出子单元305的输出值。若best小汽轮机顺控启动第19步且best小汽轮机旁路阀的阀位小于预设阀位阈值,则模拟量切换选择模块307的输出为常数模块306中的预设值0。
66.在本技术的一些实施例中,如图3所示,跟踪状态识别单元204包括best小汽轮机
轴封系统顺控启动指令的开关量信号输入模块308、best小汽轮机顺控启动第8步的开关量信号输入模块309、旁路阀快开电磁阀带电指令的开关量信号输入模块310、best小汽轮机跳闸的开关量信号输入模块311、第一脉冲模块312、第二脉冲模块313、第三脉冲模块314和第一或模块315。其中,best小汽轮机轴封系统顺控启动指令的开关量信号输入模块308与第一脉冲模块312的输入端连接,best小汽轮机顺控启动第8步的开关量信号输入模块309与第二脉冲模块313的输入端连接,best小汽轮机跳闸的开关量信号输入模块311与第三脉冲模块314的输入端连接,第一脉冲模块312的输出端、第二脉冲模块313的输出端、旁路阀快开电磁阀带电指令的开关量信号输入模块310和第三脉冲模块314的输出端均与第一或模块315的输入端连接,第一或模块315的输出端与模拟量手操器单元201的ts输入端连接。best小汽轮机跳闸信号输出子单元204-1中包括best小汽轮机跳闸的开关量信号输入模块310和第三脉冲模块314。
67.其中,best小汽轮机顺控启动第8步为检查best小汽轮机主汽门状态,旁路快开电磁阀失电,旁路阀全开可调,开启best小汽轮机的排汽阀、补汽阀、溢流阀、旁路电动门,确认补气阀投入自动。第一脉冲模块312、第二脉冲模块313和第三脉冲模块314中的脉冲时间可以根据实际需求来设定。若best小汽轮机轴封系统顺控启动指令,或best小汽轮机顺控启动第8步,或旁路阀快开电磁阀带电指令,或best小汽轮机跳闸中任一个条件满足时,则第一或模块315输出高电平信号,即模拟量手操器单元201的ts端被触发,此时模拟量手操器单元201为跟踪状态,模拟量手操器单元201的输出信号为第一常数单元205中的设定值。
68.在本技术的一些实施例中,如图3所示,手动状态识别单元206包括延时关模块316、延时开模块317和第二或模块318。其中,延时关模块316的输入端与运行工况状态识别单元202的输出端连接,即延时关模块316的输入端与第一与模块304的输出端连接。延时关模块316的输出端与延时开模块317的输入端连接,延时开模块317的输出端和best小汽轮机跳闸信号输出子单元204-1的输出端均与第二或模块318的输入端连接,即延时开模块317的输出端和第三脉冲模块314的输出端均与第二或模块318的输入端连接。第二或模块318的输出端与模拟量手操器单元201的tom输入端连接。延时关模块316和延时开模块317中的延迟时长可以基于实际需求来设定。
69.也就是说,若best小汽轮机顺控启动第十九步的信号触发,且best小汽轮机旁路阀的阀位小于3%,或者best小汽轮机跳闸,则识别旁路阀为人工手动控制状态,模拟量手操器单元201的tom输入端被触发,运行人员可自行调整best小汽轮机旁路阀的阀位。
70.如图3所示,自动状态识别单元207包括best小汽轮机汽源切换完成的开关量信号输入模块319、best小汽轮机顺控启动第16步的开关量信号输入模块320、第二与模块321和第四脉冲模块322。其中,best小汽轮机汽源切换完成的开关量信号输入模块319和best小汽轮机顺控启动第16步的开关量信号输入模块320均与第二与模块321的输入端连接,第二与模块321的输出端与第四脉冲模块322的输入端连接,第四脉冲模块322的输出端与模拟量手操器单元201的reqa输入端连接。best小汽轮机顺控启动第16步为汽源切换完成,旁路阀投自动,背压曲线设定投入,退出转速释放。
71.其中,模拟量手操器单元201的reqa输入端为切换至自动开关,当reqa输入端接收到开关量信号为1时,则此时模拟量手操器单元201在自动操作状态,将x输入端接收的信号作为输出信号。当reqa输入端接收到开关量信号为0时,则此时模拟量手操器单元201在未
自动操作状态。也就是说,若beat小汽轮机汽源切换完成且best小汽轮机顺控启动第16步的信号触发,则第二与模块321输出开关量信号1,在对应脉冲时间内模拟量手操器单元201的reqa输入端被触发,模拟量手操器单元201在自动操作状态,并将x输入端接收的信号作为输出信号。
72.此外,图4为本技术实施例中的旁路阀pid调节模块输出子单元的结构框图。如图4所示,在本技术的一些实施例中,旁路阀pid调节模块输出子单元包括best小汽轮机第一排汽压力的模拟量信号输入模块401、best小汽轮机延时背压设定值的模拟量信号输入模块402、旁路阀的第一阀位控制手动模式的开关量信号输入模块403、best小汽轮机末级压比设定值的模拟量信号输入模块404、best小汽轮机第二排汽压力的模拟量信号输入模块405、旁路阀的第二阀位控制手动模式的开关量信号输入模块406、best小汽轮机顺控启动运行中的开关量信号输入模块407、七号低压加热器切除的开关量信号输入模块408、八号低压加热器切除的第一开关量信号输入模块409、best小汽轮机旁路阀全关的开关量信号输入模块410、旁路阀的第三阀位控制手动模式的开关量信号输入模块411、八号低压加热器切除的第二开关量信号输入模块412、best小汽轮机跳闸的开关量信号输入模块413、best小汽轮机旁路阀的阀位的模拟量信号输入模块414、旁路阀快开电磁阀带电指令且旁路阀未在手动模式的开关量信号输入模块415、旁路阀的第四阀位控制手动模式的开关量信号输入模块416、best旁路阀位启机背压控制kp的模拟量信号输入模块417、best旁路阀位7级抽汽切除压比控制kp的模拟量信号输入模块418、best旁路阀位启机背压控制ti的模拟量信号输入模块419、best旁路阀位7级抽汽切除压比控制ti的模拟量信号输入模块420、旁路阀pid调节模块输出值的模拟量信号输出模块421、第一模拟量切换选择模块422、第二模拟量切换选择模块423、第三模拟量切换选择模块424、第四模拟量切换选择模块425、第五模拟量切换选择模块426、第一减法模块427、第二减法模块428、第一乘法模块429、第二乘法模块430、第一非模块431、第二非模块432、第一与模块433、第二与模块434、rs触发器模块435、第一或模块436、第二或模块437、第一常数模块438、第二常数模块439、pid调节模块440。
73.其中,best小汽轮机延时背压设定值的模拟量信号输入模块402与第一模拟量切换选择模块422的第一输入端连接,best小汽轮机第一排汽压力的模拟量信号输入模块401与第一模拟量切换选择模块422的第二输入端连接,旁路阀的第一阀位控制手动模式的开关量信号输入模块403与第一模拟量切换选择模块422的en输入端连接,best小汽轮机第一排汽压力的模拟量信号输入模块401与第一减法模块427的第一输入端连接,第一模拟量切换选择模块422的输出端与第一减法模块427的第二输入端连接,第一减法块427的输出端与第一乘法模块429的输入端连接。
74.也就是说,若旁路阀的第一阀位控制手动模式的开关量信号输入模块403输出的开关量信号为0,则第一减法模块427的输出为best小汽轮机排汽压力与best小汽轮机延时背压设定值之间的差值。若旁路阀的第一阀位控制手动模式的开关量信号输入模块403输出的开关量信号为1,则第一减法模块427的输出为0。
75.需要说明的是,best小汽轮机延时背压设定值的模拟量信号输入模块402用于基于负荷与背压设定值的对应关系,根据机组负荷,确定背压设定值。作为一种示例,图5为本技术实施例中的best小汽轮机负荷与背压设定值的对应关系示意图,best小汽轮机延时背
压设定值的模拟量信号输入模块402根据如图5所示的对应关系,根据机组负荷,确定与其对应的背压设定值。
76.如图4所示,best小汽轮机末级压比设定值的模拟量信号输入模块404与第二模拟量切换选择模块423的第一输入端连接,best小汽轮机第二排汽压力的模拟量信号输入模块405与第二模拟量切换选择模块423的第二输入端连接,旁路阀的第二阀位控制手动模式的开关量信号输入模块406与第二模拟量切换选择模块423的en输入端连接,第二模拟量切换选择模块423的输出端与第二减法模块428的第一输入端连接,best小汽轮机第二排汽压力的模拟量信号输入模块405与第二减法模块428的第二输入端连接,第二减法模,428的输出端与第二乘法模块430的输入端连接。
77.其中,best小汽轮机末级压比设定值的模拟量信号输入模块404用于根据best小汽轮机实际转速,确定末级压比设定值。图6为best小汽轮机实际转速与末级压比设定值的对应关系示意图,则best小汽轮机末级压比设定值的模拟量信号输入模块404基于图6所示的对应关系,根据best小汽轮机实际转速x,确定末级压比设定值y。
78.如图4所示,best小汽轮机顺控启动运行中的开关量信号输入模块407与第一非模块431的输入端连接,第一非模块431的输出端、七号低压加热器切除的开关量信号输入模块408和八号低压加热器切除的第一开关量信号输入模块409均与第一与模块433的输入端连接,第一与模块433的输出端与rs触发器模块435的s输入端连接。八号低压加热器切除的第二开关量信号输入模块412与第二非模块434的输入端连接,第二非模块434的输出端、best小汽轮机旁路阀全关的开关量信号输入模块410和旁路阀的第三阀位控制手动模式的开关量信号输入模块411均与第二与模块434的输入端连接,第二与模块434的输出端和best小汽轮机跳闸的开关量信号输入模块413均与第一或模块436的输入端连接,第一或模块436的输出端与rs触发器435的r输入端连接。
79.第一乘法模块的输出端429与第三模拟量切换选择模块424的第一输入端连接,第二乘法模块430的输出端与第三模拟量切换选择模块424的第二输入端连接,rs触发器模块435的dv输出端与第三模拟量切换选择模块424的en输入端连接,第三模拟量切换选择模块424的输出端与pid调节模块440的e输入端连接。也就是说,若第三模拟量切换选择模块424的en输入端为0,则第三模拟量切换选择模块424的输出为best小汽轮机排汽压力与best小汽轮机延时背压设定值的差值,即best小汽轮机排汽压力与best小汽轮机延时背压设定值的差值作为pid调节模块440的e输入端的输入值。若第三模拟量切换选择模块424的en输入端为1,则第三模拟量切换选择模块424的输出为best小汽轮机排汽压力与best小汽轮机末级压比组低的控制值的差值,即best小汽轮机排汽压力与best小汽轮机末级压比组低的控制值的差值作为pid调节模块440的e输入端的输入值。
80.第一常数模块438与pid调节模块440的h输入端连接;第二常数模块439与pid调节模块的l输入端连接。best小汽轮机旁路阀的阀位的模拟量信号输入模块414与pid调节模块440的tr输入端连接。旁路阀快开电磁阀带电指令且旁路阀未在手动模式的开关量信号输入模块415和旁路阀的第四阀位控制手动模式的开关量信号输入模块416均与第二或模块437的输入端连接,第二或模块437的输出端与pid调节模块440的ts输入端连接。
81.其中,第一常数模块438用于设定pid调节模块的输出上限值,比如第一常数模块438中的预设值为100。第二常数模块439用于设定pid调节模块的输出下限值,比如第二常
数模块439中的预设值可以为0。pid调节模块440的tr输入端为跟踪值,pid调节模块440的ts输入端为跟踪开关。若旁路阀快开电磁阀带电指令且旁路阀未在手动模式,或旁路阀的阀位控制手动模式,pid调节模块440的ts输入端接收到开关量信号为1,则pid调节模块440处于跟踪状态,并将ts输入端接收到的信号作为pid调节模块440的输出值。若pid调节模块440的ts输入端接收到开关量信号为0,则pid调节模块440未处于跟踪状态,pid调节模块440将e输入端接收到的信号进行计算,并将计算结果作为pid调节模块440的输出值。
82.如图4所示,best旁路阀位启机背压控制kp的模拟量信号输入模块417与第四模拟量切换选择模块425的第一输入端连接,best旁路阀位7级抽汽切除压比控制kp的模拟量信号输入模块418与第四模拟量切换选择模块425的第二输入端连接,rs触发器模块435的dv输出端与第四模拟量切换模块425的en输入端连接,第四模拟量切换模块425的输出端与pid调节模块440的kp输入端连接。best旁路阀位启机背压控制ti的模拟量信号输入模块419与第五模拟量切换选择模块426的第一输入端连接,best旁路阀位7级抽汽切除压比控制ti的模拟量信号输入模块420与第五模拟量切换选择模块426的第二输入端连接,rs触发器模块435的dv输出端与第五模拟量切换模块426的en输入端连接,第五模拟量切换模块426的输出端与pid调节模块440的ki输入端连接。pid调节模块440的输出端与旁路阀pid调节模块输出值的模拟量信号输出模块421连接。也就是说,旁路阀pid调节模块输出值的模拟量信号输出模块421为旁路阀pid调节模块输出子单元的输出端。
83.其中,pid调节模块440的kp输入端为设定pid调节中的比例放大系数,best旁路阀位启机背压控制kp的模拟量信号输入模块417对应的预设值可以为2,best旁路阀位7级抽汽切除压比控制kp的模拟量信号输入模块418对应的预设值可以为0.5。也就是说,若第四模拟量切换选择模块425的en端为0,则pid调节模块440的kp端为best旁路阀位启机背压控制kp值,若第四模拟量切换选择模块425的en端为1,则pid调节模块440的kp端为best旁路阀位7级抽汽切除压比控制kp值。
84.pid调节模块440的ti输入端为设定pid调节中的积分时间。best旁路阀位启机背压控制ti的模拟量信号输入模块419对应的预设值可以为15,best旁路阀位7级抽汽切除压比控制ti的模拟量信号输入模块420对应的预设值可以为4。也就是说,若第五模拟量切换模块426的en端为0,则pid调节模块440的ti端为best旁路阀位启机背压控制ti值,若第五模拟量切换模块426的en端为1,则pid调节模块440的ti端为est旁路阀位7级抽汽切除压比控制ti值。
85.根据本技术实施例的基于best小汽轮机的旁路阀调节控制系统,由自动状态识别单元、跟踪状态识别单元和手动状态识别单元来结合不同工况,确定best小汽轮机旁路阀的控制状态,并通过模拟量手操器单元根据旁路阀的控制状态,输出对应的best小汽轮机旁路阀的阀位指令,以实时调节旁路阀的阀位。该系统完全适用于best小汽轮机带小发电机的设备,使在启动和运行期间的旁路阀调节处于全自动状态,以保证机组的安全正常运行。
86.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任
一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
87.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本技术的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
88.此外,在本技术各个实施例中的各功能单元可以集成在一个处理模块中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个模块中。
89.尽管上面已经示出和描述了本技术的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1