一种气吸式风机塔筒攀爬机器狗的制作方法
1.本发明涉及风力发电高处作业设备技术领域,尤其涉及一种气吸式风机塔筒攀爬机器狗。
背景技术:
2.目前,风力发电机组塔筒的维护往往采用吊篮或者蜘蛛人的方式进行,这种高处作业伴随着极高的危险系数,特别在阵风、雷暴、烈日等环境下,发生安全事故的几率会大概率增加。
3.目前人员在风机塔筒外壁高空作业的缺点:
4.1、危险系数高,坠落伤害大。
5.2、长期高空作业会使人疲惫而发生危险。
6.3、突发天气会使人发生危险,如突然的雷暴、阵风等。
7.授权公告号为cn 104554510 b,名称为带有柔性结构的仿生机器狗。包括机身框架、柔性脊背、四条腿、头部、颈部、尾部和驱动装置,四条腿均包括大腿、小腿和足部,四条腿的大腿的顶端分别与前框架和后框架的两侧连接,颈部的底端和前框架的前端、大腿底端和小腿顶端以及小腿底端和足部之间均采用铰接连接,头部与颈部顶端连接,尾部顶端与后框架后端连接,柔性脊背的两端分别连接前框架的后端和后框架的前端,驱动装置包括数组电机和传动机构,电机通过传动机构带动大腿、小腿、足部、头部、颈部和尾部完成一定的动作,柔性脊背为柔性连接件,四条腿均设有柔性部件,运动形态多样,柔性结构能够吸收冲击和传递能量,提高运动灵活性。
8.授权公告号为cn 106828653 b,名称为一种无线控制气动仿生爬行机器狗。主要包括支架和连接件,所述支架分为左右两个完全相同的结构;支架采用双层板体框架结构,在两层板体之间安装电磁换向阀,在两层板体周围使用连杆进行上下连接;两个支架之间通过连接件进行活动连接;在两个支架的上层板同一侧安装转向单元;在支架的下层板底部平行固定安装大腿气缸a和大腿气缸b,大腿气缸a的活动端与小腿气缸a相连,小腿气缸a与大腿气缸a呈垂直状态,在小腿气缸a的底部垂直固接脚掌a;大腿气缸b的活动端与小腿气缸b相连,小腿气缸b与大腿气缸b呈垂直状态,在小腿气缸b的底部垂直固接脚掌b。具有结构简单、使用率高、转向方便等优点。
9.授权公告号为cn 107596698 b,名称为一种智能仿生机器狗的控制系统及实现方法。所述控制系统包括:语音交互模块、双核处理器模块、app控制模块、蓝牙模块、红外视觉模块、姿态检测模块、触摸检测模块、音频输出模块、眼睛显示模块以及运动控制模块,语音交互模块在接收用户发出的声音通过特定的提取算法将相应的声音进行特征值的采取,将提取到的声音特征值与存在的语音模式库进行相应的匹配,进入相应的模式匹配算法匹配出相应的识别结果后根据预先设置的语音与控制指令的对应关系,执行运动控制模式中的相应动作,控制智能仿生机器狗进行各种运动、音乐播放、智能喂养、根据音乐跳舞以及与用户进行语音交互,使得智能仿生机器狗根据相应的识别做出不同的情感反应。
10.结合上述三篇专利文献和现有的技术方案,发明人分析发现在现有技术方案中存在如下技术问题。
11.现有技术方案中的机器狗不能攀爬风力发电机组的塔筒。
12.现有技术问题及思考:
13.如何解决机器狗不能攀爬风力发电机组塔筒的技术问题。
技术实现要素:
14.本发明所要解决的技术问题是提供一种气吸式风机塔筒攀爬机器狗,解决的技术问题。
15.为解决上述技术问题,本发明所采取的技术方案是:一种气吸式风机塔筒攀爬机器狗包括机身框架、四条腿和驱动装置,每一条腿包括依次连接的大腿、小腿和足部,身框架与每一条大腿连接,驱动装置设置在机身框架上,驱动装置与每一条腿连接,还包括控制器、真空泵和控制管路,所述控制器和真空泵设置在机身框架上,所述足部为吸盘,所述控制管路包括管路和设置在管路上的电磁阀,所述管路的一端与真空泵连接导通,管路的另一端与吸盘连接导通,控制器分别与驱动装置和电磁阀电连接。
16.进一步的技术方案在于:所述控制管路的数量为四个分别是结构相同的第一至第四控制管路,所述吸盘的数量为四个分别是结构相同的第一至第四吸盘,一个吸盘设置在一条小腿上,第一控制管路包括第一管路和设置在第一管路上第一电磁阀,第二控制管路包括第二管路和第二电磁阀,第三控制管路包括第三管路和第三电磁阀,第四控制管路包括第四管路和第四电磁阀,所述第一管路的一端与真空泵连接导通,第一管路的另一端与第一吸盘连接导通,控制器的控制端分别与每一电磁阀的控制端电连接。
17.进一步的技术方案在于:所述管路穿入大腿和小腿的内部,所述控制器为单片机。
18.进一步的技术方案在于:所述吸盘为橡胶制成的橡胶吸盘。
19.进一步的技术方案在于:在吸盘上设置有密封圈。
20.进一步的技术方案在于:还包括柔性脊背、头部、颈部和尾部,机身框架包括前框架和后框架,四条腿的大腿的顶端分别与前框架和后框架的两侧连接,颈部的底端和前框架的前端、大腿底端和小腿顶端以及小腿底端和足部之间均采用铰接连接,头部与颈部顶端连接,尾部顶端与后框架后端连接,柔性脊背连接在前框架的后端与后框架的前端之间,所述驱动装置包括数组电机和传动机构,电机通过传动机构与大腿、小腿、足部、头部、颈部和尾部连接并完成动作,所述柔性脊背为柔性连接件,四条腿均设有柔性部件,所述大腿和小腿的连接部分的传动机构包括绕线盘、线、弹簧和孔座,线的一端与绕线盘的凹槽连接,线的另一端与小腿的底端连接,机身框架、大腿和小腿上均设有孔座,线被限制在孔座的通孔中,弹簧固定在小腿与大腿之间,第一电机与绕线盘连接,第一电机固定在机身框架上。
21.进一步的技术方案在于:所述柔性脊背包括钢板弹簧和阻尼气缸,弹簧钢板和阻尼气缸连接在前框架的后端与后框架的前端之间,阻尼气缸位于弹簧钢板的下方。
22.进一步的技术方案在于:所述尾部的传动机构包括拨叉机构、驱动齿轮、花键轴、花键轴承座、第一传动链、第二传动链、传动轴和传动轴轴承座,拨叉机构包括拔叉、拔叉导轨、拔叉导轨轴承座和电永磁铁,第二电机固定在后框架上,第二电机与花键轴连接,花键轴两端设在花键轴承座中,花键轴穿过驱动齿轮的齿轮孔和拔叉一端的u型开口,驱动齿轮
的齿轮孔与花键轴配合,驱动齿轮位于拔叉的u型开口内,拔叉导轨穿过拔叉的另一端,拔叉导轨与花键轴平行,拔叉导轨的两端设在拔叉导轨轴承座中,电永磁铁固定在拔叉导轨轴承座外侧,电永磁铁吸引或排斥拔叉使拔叉位于拔叉导轨最左端或最右端,驱动齿轮在拔叉导轨的最左端和最右端分别连接第一传动链和第二传动链,第一传动链和第二传动链分别连接传动轴,传动轴两端设在传动轴轴承座上,传动轴与尾部连接,花键轴承座、拔叉导轨轴承座和传动轴轴承座均固定在后框架上,所述的拔叉正对电永磁铁的一面嵌有永磁铁。
23.进一步的技术方案在于:所述大腿顶端的内侧固定有第三圆锥齿轮,第三圆锥齿轮和大腿上设有通孔,第三电机和第四电机固定在机身框架上,第三电机与连接杆连接,连接杆穿过一对定位耳片,定位耳片固定在机身框架上,连接杆位于两定位耳片之间的部分上设有直杆,直杆与连接杆垂直,直杆的一端固定在连接杆上,直杆的另一端穿过第三圆锥齿轮和大腿的通孔,直杆的另一端设有定位挡圈,定位挡圈与大腿外侧接触,第四电机的输出轴前端固定有第四圆锥齿轮,第四圆锥齿轮与第三圆锥齿轮啮合。
24.进一步的技术方案在于:所述颈部的底端固定有两个销轴,第五电机固定在前框架的前部,第五电机与其中一个销轴的一端连接,销轴的另一端设在固定座中,另一个销轴的两端分别设在两个固定座中,固定座固定在前框架上。
25.采用上述技术方案所产生的有益效果在于:
26.一种气吸式风机塔筒攀爬机器狗包括机身框架、四条腿和驱动装置,每一条腿包括依次连接的大腿、小腿和足部,身框架与每一条大腿连接,驱动装置设置在机身框架上,驱动装置与每一条腿连接,还包括控制器、真空泵和控制管路,所述控制器和真空泵设置在机身框架上,所述足部为吸盘,所述控制管路包括管路和设置在管路上的电磁阀,所述管路的一端与真空泵连接导通,管路的另一端与吸盘连接导通,控制器分别与驱动装置和电磁阀电连接。该技术方案,其通过控制器、真空泵、控制管路和吸盘等,实现机器狗能够攀爬风力发电机组塔筒。
27.详见具体实施方式部分描述。
附图说明
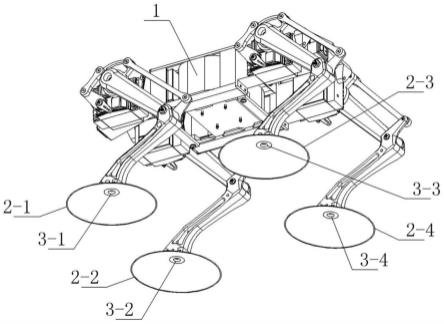
28.图1是本发明实施例1的结构图;
29.图2是本发明实施例1的原理框图;
30.图3是本发明实施例2的结构图;
31.图4是本发明实施例3吸盘的结构图。
32.其中:1真空泵、2-1第一橡胶吸盘、2-2第二橡胶吸盘、2-3第三橡胶吸盘、2-4第四橡胶吸盘、3-1第一管路、3-2第二管路、3-3第三管路、3-4第四管路、4-1第一钢制吸盘、4-2第二钢制吸盘、4-3第三钢制吸盘、4-4第四钢制吸盘、5密封圈。
具体实施方式
33.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本技术及其应用或使
用的任何限制。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
34.在下面的描述中阐述了很多具体细节以便于充分理解本技术,但是本技术还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本技术内涵的情况下做类似推广,因此本技术不受下面公开的具体实施例的限制。
35.实施例1:
36.如图1和图2所示,本发明公开了一种气吸式风机塔筒攀爬机器狗包括机身框架、柔性脊背、四条腿、头部、颈部、尾部、驱动装置、控制器、真空泵1和控制管路,每一条腿包括依次连接的大腿、小腿和足部,身框架与每一条大腿连接,驱动装置安装在机身框架上,驱动装置与每一条腿连接。
37.机身框架包括前框架和后框架,四条腿的大腿的顶端分别与前框架和后框架的两侧连接,颈部的底端和前框架的前端、大腿底端和小腿顶端以及小腿底端和足部之间均采用铰接连接,头部与颈部顶端连接,尾部顶端与后框架后端连接,柔性脊背连接在前框架的后端与后框架的前端之间,所述驱动装置包括数组电机和传动机构,电机通过传动机构与大腿、小腿、足部、头部、颈部和尾部连接并完成动作,所述柔性脊背为柔性连接件,四条腿均设有柔性部件,所述大腿和小腿的连接部分的传动机构包括绕线盘、线、弹簧和孔座,线的一端与绕线盘的凹槽连接,线的另一端与小腿的底端连接,机身框架、大腿和小腿上均设有孔座,线被限制在孔座的通孔中,弹簧固定在小腿与大腿之间,第一电机与绕线盘连接,第一电机固定在机身框架上。
38.所述柔性脊背包括钢板弹簧和阻尼气缸,弹簧钢板和阻尼气缸连接在前框架的后端与后框架的前端之间,阻尼气缸位于弹簧钢板的下方。
39.所述尾部的传动机构包括拨叉机构、驱动齿轮、花键轴、花键轴承座、第一传动链、第二传动链、传动轴和传动轴轴承座,拨叉机构包括拔叉、拔叉导轨、拔叉导轨轴承座和电永磁铁,第二电机固定在后框架上,第二电机与花键轴连接,花键轴两端设在花键轴承座中,花键轴穿过驱动齿轮的齿轮孔和拔叉一端的u型开口,驱动齿轮的齿轮孔与花键轴配合,驱动齿轮位于拔叉的u型开口内,拔叉导轨穿过拔叉的另一端,拔叉导轨与花键轴平行,拔叉导轨的两端设在拔叉导轨轴承座中,电永磁铁固定在拔叉导轨轴承座外侧,电永磁铁吸引或排斥拔叉使拔叉位于拔叉导轨最左端或最右端,驱动齿轮在拔叉导轨的最左端和最右端分别连接第一传动链和第二传动链,第一传动链和第二传动链分别连接传动轴,传动轴两端设在传动轴轴承座上,传动轴与尾部连接,花键轴承座、拔叉导轨轴承座和传动轴轴承座均固定在后框架上,所述的拔叉正对电永磁铁的一面嵌有永磁铁。
40.所述大腿顶端的内侧固定有第三圆锥齿轮,第三圆锥齿轮和大腿上设有通孔,第三电机和第四电机固定在机身框架上,第三电机与连接杆连接,连接杆穿过一对定位耳片,定位耳片固定在机身框架上,连接杆位于两定位耳片之间的部分上设有直杆,直杆与连接杆垂直,直杆的一端固定在连接杆上,直杆的另一端穿过第三圆锥齿轮和大腿的通孔,直杆的另一端设有定位挡圈,定位挡圈与大腿外侧接触,第四电机的输出轴前端固定有第四圆锥齿轮,第四圆锥齿轮与第三圆锥齿轮啮合。
41.所述颈部的底端固定有两个销轴,第五电机固定在前框架的前部,第五电机与其中一个销轴的一端连接,销轴的另一端设在固定座中,另一个销轴的两端分别设在两个固
定座中,固定座固定在前框架上。
42.如图1所示,所述控制器和真空泵1固定在机身框架上,所述足部为吸盘,所述吸盘为橡胶制成的橡胶吸盘,所述控制管路的数量为四个分别是结构相同的第一至第四控制管路,所述吸盘的数量为四个分别是结构相同的第一至第四橡胶吸盘2-1~2-4,一个吸盘安装在一条小腿上,第一控制管路包括第一管路3-1和固定在第一管路3-1上第一电磁阀,第二控制管路包括第二管路3-2和第二电磁阀,第三控制管路包括第三管路3-3和第三电磁阀,第四控制管路包括第四管路3-4和第四电磁阀,所述第一管路3-1的一端与真空泵1连接导通,第一管路3-1的另一端与第一橡胶吸盘2-1连接导通。
43.所述管路穿入大腿和小腿的内部,所述控制器为单片机。
44.如图2所示,控制器的控制端与驱动装置的控制端电连接,控制器的控制端与第一电磁阀的控制端电连接,控制器的控制端与第二电磁阀的控制端电连接,控制器的控制端与第三电磁阀的控制端电连接,控制器的控制端与第四电磁阀的控制端电连接。
45.其中,发明点在于用吸盘替换足部,增设了真空泵、管路和电磁阀,吸盘、真空泵、管路、电磁阀和机器狗本身为现有技术在此不再赘述。
46.本技术通过控制器、真空泵、管路、电磁阀和吸盘,将吸盘吸附于塔筒表面上。控制器控制电磁阀导通,使得吸盘被真空泵吸气形成负压吸附于塔筒表面上。
47.控制器控制电磁阀断开并使得吸盘通过电磁阀与外界导通,使得吸盘内与外界气压接近,吸盘不在吸附于塔筒表面上。
48.通过控制器、真空泵、管路、电磁阀和吸盘,配以机器狗的移动相应工作,实现行走于塔筒表面上。
49.实施例2:
50.如图3所示,实施例2不同于实施例1之处在于,吸盘为由不锈钢制成的钢制吸盘,所述吸盘的数量为四个分别是结构相同的第一至第四钢制吸盘4-1~4-4。
51.实施例3:
52.如图4所示,实施例3不同于实施例2之处在于,在每一吸盘上固定有密封圈5。
53.相对于上述实施例,吸盘还可以为由太空铝或者钛合金等制成的吸盘。
54.相对于上述实施例,机器狗还可以采用宇树科技公司的机器人,机器狗本身为现有技术在此不再赘述。
55.本技术的构思:
56.风力发电机组塔筒的维护往往采用吊篮或者蜘蛛人的方式进行,这种高处作业伴随着极高的危险系数,本技术是利用机械狗代替作业人员进行高处作业。
57.本技术的目的:
58.使用机械狗代替人进行高处作业,规避人员的风险。
59.本技术的技术贡献:
60.如图1所示,本技术在传统机械狗的造型下增加气动吸盘,以完成风力发电机组塔筒的吸附攀爬。
61.工作原理:
62.真空泵产生负压,电磁阀控制软管的通断,从而使得吸盘能够负压而吸附在风机塔筒上。四个电磁阀与机械狗的四个脚互相配合可实现机械狗在风机塔筒外壁进行行走和
攀爬,增加其他装置可以实现在风机塔筒外壁作业。
63.本技术保密运行一段时间后,现场技术人员反馈的有益之处在于:
64.目前,风力发电机组塔筒的维护往往采用吊篮或者蜘蛛人的方式进行,这种高处作业伴随着极高的危险系数,特别在阵风、雷暴、烈日等环境下,发生安全事故的几率会大概率增加。本技术使用机械狗代替人进行高处作业,规避人员的风险。
65.目前,本发明的技术方案已经进行了中试,即产品在大规模量产前的较小规模试验;中试完成后,在小范围内开展了用户使用调研,调研结果表明用户满意度较高;现在已开始着手准备产品正式投产进行产业化(包括知识产权风险预警调研)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1