介入式识别发动机泵油时刻的方法、装置及存储介质与流程
1.本发明涉及一种方法、装置及存储介质,尤其是一种介入式识别发动机泵油时刻的方法、装置及存储介质。
背景技术:
2.目前,发动机厂家在柴油机的安装上,油泵的安装位置多数情况下是不固定的。任一台发动机,由于油泵安装位置的不同,会导致泵油相对于喷油的时刻存在差异。
3.对于高压共轨燃油系统而言,轨压的波动有很多影响因素,而泵油与喷油是其中两个,对于想要来优化轨压波动的厂家来说,首先要克服的难题就在于确定每一个发动机自身的泵油时刻,而这往往比较困难。因此,如何有效识别发动机泵油时刻,是目前急需解决的技术难题。
技术实现要素:
4.本发明的目的是克服现有技术中存在的不足,提供一种介入式识别发动机泵油时刻的方法、装置及存储介质,其能有效识别发动机泵油时刻,识别精度高,安全可靠。
5.按照本发明提供的技术方案,一种介入式识别发动机泵油时刻的方法,所述识别方法包括:
6.确定发动机进入等待overrun工况;
7.对进入等待overrun工况的发动机,确定所述发动机在等待overrun工况下满足介入识别条件时,配置介入设定轨压,以使得发动机基于所述介入设定轨压下泵油;
8.对基于介入设定轨压下的一发动机工作循环,采集曲轴信号盘上各个信号盘齿相对应的盘齿当前轨压,以基于所采集的盘齿当前轨压得到相应工作齿的工作齿当前轨压状态;
9.基于发动机工作循环下所有工作齿相对应的工作齿当前轨压状态,确定在发动机工作循环下满足泵油特性的泵油齿号,以利用所述泵油齿号表征油泵的泵油时刻,其中,所述泵油齿号为满足泵油特性工作齿在发动机工作循环下的编号。
10.确定在等待overrun工况下满足介入识别条件时,所述满足介入识别条件包括发动机处于等待overrun工况、当前信号盘齿对应的当前轨压小于标定的安全轨压阈值、未识别出发动机泵油时刻以及发动机当前未有影响介入识别的故障。
11.配置介入设定轨压时,则有:p
int
=p0+p
δ
,其中,
12.p
int
为介入设定轨压,p0为预设当前轨压,p
δ
为轨压偏差。
13.对一发动机工作循环,曲轴信号盘转动两圈,以根据曲轴信号盘上的60个信号盘齿得到120个工作齿相对应的工作齿当前轨压,其中,120个工作齿的编号为0~119;
14.基于120个工作齿相对应的工作齿当前轨压,确定满足泵油特性的泵油齿号时,按依照工作齿的编号依次变化顺序,比较一工作齿当前轨压与所述工作齿当前轨压的前一工作齿当前轨压,以在比较后得到工作齿当前轨压差值,根据连续两个相应工作齿当前轨压
差值的状态进行计数;
15.当计数值大于轨压计数阈值且所述计数值达到峰值时,则将工作齿的编号锁定,以作为泵油齿号。
16.根据连续两个相应工作齿当前轨压差值的状态进行计数时,当连续两个工作齿当前轨压差值大于0时,则将当前计数值累加1;
17.当连续两个工作齿当前轨压差值小于0时,则将当前计数值减1,否则,将当前计数值清零。
18.在确定泵油齿号时,还统计在一发动机工作循环下泵油齿号的数量n。
19.还包括泵油时刻校验步骤;
20.泵油时刻校验时,将n个泵油齿号依照编号大小的顺序排布,以计算得到相邻两个泵油齿号对应编号的差值;当所有编号差值均满足等间隔的校验时,则所确定泵油齿号以及泵油齿号的数量n校验通过。
21.校验通过后,将所确定泵油齿号存储。
22.一种介入式识别发动机泵油时刻的装置,包括
23.位置传感器,用于获取曲轴信号盘上信号盘齿的位置状态;
24.轨压传感器,用于采集信号盘齿相对应的盘齿当前轨压;
25.识别控制器,识别确定发动机进入等待overrun工况,在等待overrun工况下满足介入识别条件时,配置介入设定轨压,以控制发动机基于所述介入设定轨压下泵油;
26.对基于介入设定轨压下的一发动机工作循环,识别控制器采集曲轴位置传感器所获取信号盘齿的位置状态以及轨压传感器所获取的盘齿当前轨压,以生成相应的工作齿以及与所述工作齿相对应的工作齿当前轨压状态;
27.基于发动机工作循环下所有工作齿相对应的工作齿当前轨压状态,所述识别控制器确定在发动机工作循环下满足泵油特性的泵油齿号,以利用所述泵油齿号表征油泵的泵油时刻,其中,所述泵油齿号为满足泵油特性工作齿在发动机工作循环下的编号。
28.一种介入式识别发动机泵油时刻的存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
29.本发明的优点:在发动机进入等待overrun工况后,配置介入设定轨压,控制发动机基于介入设定轨压下泵油,对基于介入设定轨压下的一发动机工作循环,以基于所采集的盘齿当前轨压得到相应工作齿的工作齿当前轨压状态;基于发动机工作循环下所有工作齿相对应的工作齿当前轨压状态,确定在发动机工作循环下满足泵油特性的泵油齿号,以利用所述泵油齿号表征油泵的泵油时刻,即能有效识别发动机泵油时刻,识别精度高,安全可靠。
附图说明
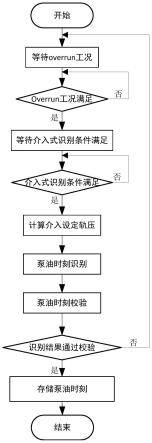
30.图1为本发明的工作流程图。
31.图2为本发明根据计数统计确定泵油齿号以及泵油齿号数量的示意图。
32.图3为本发明进行泵油时刻校验的示意图。
33.图4为本发明识别装置的结构框图。
具体实施方式
34.下面结合具体附图和实施例对本发明作进一步说明。
35.如图1所示:为了能有效识别发动机泵油时刻,本发明介入式识别发动机泵油时刻的方法,具体地,所述识别方法包括:
36.确定发动机进入等待overrun工况;
37.对进入等待overrun工况的发动机,确定所述发动机在等待overrun工况下满足介入识别条件时,配置介入设定轨压,以使得发动机基于所述介入设定轨压下泵油;
38.对基于介入设定轨压下的一发动机工作循环,采集曲轴信号盘上各个信号盘齿相对应的盘齿当前轨压,以基于所采集的盘齿当前轨压得到相应工作齿的工作齿当前轨压状态;
39.基于发动机工作循环下所有工作齿相对应的工作齿当前轨压状态,确定在发动机工作循环下满足泵油特性的泵油齿号,以利用所述泵油齿号表征油泵的泵油时刻,其中,所述泵油齿号为满足泵油特性工作齿在发动机工作循环下的编号。
40.本发明的一个实施例中,当处于松油门状态时,则可确定发动机进入等待overrun工况;发动机进入等待overrun工况时,则会停止喷油,但油泵会正常泵油,在等待overrun工况下,能避免泵油和喷油时刻重叠在一起,对识别产生的可能干扰,提高对泵油时刻识别的可靠性与准确度。因此,在未进入等待overrun工况时,则需要循环检测状态,直至发动机进入等待overrun工况。具体实施时,可以采用本技术领域常用的技术手段检测发动机是否进入overrun工况,具体确定发动机进入overrun工况的方式以及过程可根据实际需要选择,以能满足实际应用的需求为准。
41.发动机进入等待overrun工况后,为了能提高识别的准确性,需要进行介入识别条件的检测,即只有在满足介入识别条件且进行介入轨压配置后再进行泵油时刻的识别。在满足介入识别条件后,配置介入设定轨压,其中,所配置的介入设定轨压一般大于预设的当前轨压。在配置介入设定轨压后,控制发动机基于所述介入设定轨压下泵油,此时,可提高对泵油时刻识别的准确性与可靠性。
42.一发动机工作循环,即发动机经过一个完整的工作过程,此时,发动机内的油缸均完成做功-排气-进气-压缩的过程,发动机工作循环的具体情况与现有相一致。由上述说明可知,本发明的一个实施例中,在进行泵油时刻识别时,即处于基于介入设定轨压下的一发动机工作循环。
43.一般地,在发动机的曲轴上安装有曲轴信号盘,曲轴信号盘的外圈边缘设置若干信号盘齿,信号盘齿一般均匀分布于曲轴信号盘的外圈边缘,信号盘齿、曲轴信号盘以及发动机曲轴间的具体对应配合关系均与现有相一致,为本技术领域人员所熟知。
44.曲轴信号盘跟随发动机曲轴转动时,一般利用与曲轴信号盘适配的位置传感器可获取曲轴信号盘上信号盘齿的位置,利用轨压传感器可获取当前信号盘齿对应的当前轨压,即可采集曲轴信号盘上各个信号盘齿相对应的盘齿当前轨压。本技术领域周知,在一发动机工作循环下,曲轴信号盘跟随发动机曲轴转动两圈,因此,一发动机工作循环下,工作齿的数量为信号盘齿数量的两倍,此处,信号盘齿包括曲轴信号盘上的缺齿。曲轴信号盘跟随曲轴转动过程中,即可根据信号盘齿、盘齿当前轨压分别生成相对应的工作齿、工作齿当前轨压。
45.本发明的一个实施例中,利用所有工作齿相对应的工作齿当前轨压状态,可确定发动机工作循环下满足泵油特性的泵油齿号;满足泵油特性,具体是指在泵油时,工作齿当前轨压上升且在上升到峰值后,一工作齿当前轨压与介入设定轨压匹配,此后,工作齿当前轨压较介入设定轨压下降。工作齿当前轨压与介入设定轨压匹配,具体是指工作齿当前轨压与介入设定轨压相一致,或者,工作齿当前轨压与介入设定轨压之间的差值位于一个允许的差值范围内,所述允许的差值具体可以根据需要选择,以能满足实际的应用场景需求为准。
46.由上述说明可知,确定满足泵油特性的泵油齿号即为满足泵油特性工作齿在发动机工作循环下的编号;本发明的一个实施例中,利用所述泵油齿号表征油泵的泵油时刻。
47.本发明的一个实施例中,确定在等待overrun工况下满足介入识别条件时,所述满足介入识别条件包括发动机处于等待overrun工况、当前信号盘齿对应的当前轨压小于标定的安全轨压阈值、未识别出发动机泵油时刻以及发动机当前未有影响介入识别的故障。
48.具体地,介入识别条件中发动机处于等待overrun工况的具体情况可以参考上述说明,此处不再赘述。当前信号盘齿对应的当前轨压小于标定的安全轨压阈值,即发动机进入等待overrun工况下后,对每个信号盘齿对应的盘齿当前轨压均需要与标定的安全轨压阈值比较,只要存在盘齿当前轨压大于标定的安全轨压阈值时,则不满足介入识别条件,此时,需要重新检测并等待满足介入识别条件。标定的安全轨压阈值,具体为根据实际应用需求等情况标定的轨压阈值,标定的安全轨压阈值的具体情况与现有相一致,具体为本技术领域人员所熟知。
49.介入识别条件中未识别发动机泵油时刻,具体是指所述对泵油时刻的识别是在油泵安装后且未知油泵安装未知下的状态,当利用本发明泵油时刻识别后或其他方式确定发动机泵油时刻后,则停止执行本发明的介入式发动机泵油时刻识别。具体实施时,识别出的发动机泵油时刻一般存储于存储器内,从而可采用本技术领域常用的技术手段确定发动机泵油时刻的识别状态。
50.发动机当前未有影响介入识别的故障,即若发动机当前存在的故障,需要不影响介入识别,以保证整个介入识别的可靠性与稳定性;如发动机当前的存在故障不能包括轨压传感器故障(影响轨压的采集,进而影响该识别策略)以及油量计量单元故障(影响进油及轨压控制,进而影响该识别策略)。
51.本发明的一个实施例中,配置介入设定轨压时,则有:p
int
=p0+p
δ
,其中,p
int
为介入设定轨压,p0为预设当前轨压,p
δ
为轨压偏差。具体实施时,预设当前轨压p0即为正常情况下的轨压,预设当前轨压p0的具体情况与现有相一致。轨压偏差p
δ
为大于0且小于预设当前轨压p0的轨压值,具体可以根据实际需要选择,以能满足对泵油时刻识别为准。
52.本发明的一个实施例中,对一发动机工作循环,曲轴信号盘转动两圈,以根据曲轴信号盘上的60个信号盘齿得到120个工作齿相对应的工作齿当前轨压,其中,120个工作齿的编号为0~119;
53.基于120个工作齿相对应的工作齿当前轨压,确定满足泵油特性的泵油齿号时,按依照工作齿的编号依次变化顺序,比较一工作齿当前轨压与所述工作齿当前轨压的前一工作齿当前轨压,以在比较后得到工作齿当前轨压差值,根据连续两个相应工作齿当前轨压差值的状态进行计数;
54.当计数值大于轨压计数阈值且所述计数值达到峰值时,则将工作齿的编号锁定,以作为泵油齿号。
55.一般地,曲轴信号盘的外圈边缘设置60个均匀分布的信号盘齿,当曲轴信号盘跟随曲轴转动两圈后,则可得到120个工作齿相对应的工作齿当前轨压,其中,120个工作齿的编号为0~119。由上述说明可知,在一发动机工作循环后,能得到120个工作齿相对应的工作齿当前轨压,工作齿编号的情况以及工作齿当前轨压的具体情况与现有相一致。为了提高识别的可靠性,对所述一发动机工作循环,具体是指按工作齿编号顺序依次获取相应工作齿当前轨压的工作循环。
56.确定编号为0~119工作齿相对应的工作齿当前轨压后,按依照工作齿的编号依次变化顺序,如按工作齿编号依次增大的顺序,比较一工作齿当前轨压与所述工作齿当前轨压的前一工作齿当前轨压,在比较后,工作齿当前轨压差值。
57.图2中示出了一工作齿当前轨压与所述工作齿当前轨压的前一工作齿当前轨压,以确定连续两个相对应工作齿当前轨压差值的情况;图2中,第n-1齿轨压,即为编号为n-1的工作齿相对应的工作齿当前轨压,第n齿轨压即为编号为n的工作齿相对应的工作齿当前轨压,第n-2齿当前轨压即为编号为n-2的工作齿相对应的工作齿当前轨压。连续两个相应工作齿当前轨压差值的状态,具体为:第n齿轨压与第n-1齿轨压相对应的工作齿当前轨压差值(即图2中的轨压差值1),以及第n-1齿轨压与第n-2齿轨压相对应的工作齿当前轨压差值(即为图2中的轨压差值2)。图2中,n的取值可为0~119中的任一数值;当n取为0或1时,对n-1或n-2齿轨压,则均设置为第0齿轨压;以便满足具体的计算处理。
58.对120个工作齿相对应的工作齿当前轨压,均进行上述比较计数后,当计数值大于轨压计数阈值且所述计数值达到峰值时,则将工作齿的编号锁定,以作为泵油齿号。
59.本发明的一个实施例中,根据连续两个相应工作齿当前轨压差值的状态进行计数时,当连续两个工作齿当前轨压差值大于0时,则将当前计数值累加1;
60.当连续两个工作齿当前轨压差值小于0时,则将当前计数值减1,否则,将当前计数值清零。
61.对图2中的实施情况,当连续两个工作齿当前轨压差值大于0时,则将当前计数值累加1,即轨压差值1与轨压差值2均大于0时,则利用计数器进行计数,计数器计数时,每次以累加1或减值1的方式进行。图2中,轨压差值1以及轨压差值2均大于0时,即第n-1齿轨压大于第n-2齿轨压,且第n齿轨压大于第n-1齿轨压,由上述说明可知,则与泵油特性匹配。当连续两个工作齿当前轨压差值小于0时,由上述说明可知,则与喷油特性匹配,则需将当前计数值减1;当连续两个工作齿当前轨压差值,具体为一轨压差值大于0而另一轨压差值小于0时,则表明当前变化情况存在错误,需要将当前计数值清零。
62.本发明的一个实施例中,计数器可采用现有常用的计数方式,在计数后,计数值大于轨压计数阈值且所述计数值达到峰值时,则将工作齿的编号锁定,以作为泵油齿号。具体实施时,轨压计数阈值可根据实验进行标定确定得到,不同型号的发动机具有不同的轨压计数阈值。一般地,在设定好介入轨压偏差p
δ
情况下,进行实验会得到多个轨压上升段,多个上升段达到峰值的计数不一定相等,所以要识别出所有的上升段,就要考虑计数最小的一段来确阈值,即最小计数值。但是这个最小计数值也不能直接作为阈值,要留有一定裕度,因此,将最小计数值减去2,作为轨压计数阈值。达到峰值,具体是指一计数值处于极值
状态,达到峰值后,计数值会减小。
63.上述进行计数且确定泵油齿号时,一般在一发动机工作循环结束,得到编号为119号工作齿的工作齿当前轨压后,再进行上述比较以及计数确定步骤,此时,可确定所有工作齿相对应固定工作齿当前轨压。
64.本发明的一个实施例中,在确定泵油齿号时,还统计在一发动机工作循环下泵油齿号的数量n。在上述确定泵油齿后时,还能统计泵油齿号的数量n,如图2所示。
65.在统计得到泵油齿号的数量n后,还可以对上述得到的泵油齿号进行校验,即还包括泵油时刻校验步骤;
66.泵油时刻校验时,将n个泵油齿号依照编号大小的顺序排布,以计算得到相邻两个泵油齿号对应编号的差值;当所有编号差值均满足等间隔的校验时,则所确定泵油齿号以及泵油齿号的数量n校验通过。
67.图3中示出了利用n个泵油齿号进行校验的示意图,校验时,n个泵油齿号按照编号大小顺序排布,并构成一个循环;图3中,第2个泵油齿号即为顺序排布第二个位置泵油齿号;第1个泵油齿号即为顺序排布第一个位置泵油齿号,第n个泵油齿号即为顺序排布第n个位置的泵油齿号,因此,当按照依次变大的顺序排布时,第一个泵油齿号相对应的编号最小,第n个泵油齿号对应的编号最大;当按照依次变小的顺序排布时,则情况完全相反。
68.本机发动机工作循环泵油的特性可知,泵油时刻一般呈等间隔分布规律,即顺序排布后,相邻泵油齿号的差值应基本相等;n个泵油齿号,则存在n个泵油齿号的差值,与第n个泵油齿号相邻的泵油齿号为第1个泵油齿号。
69.图3中示出了利用n个泵油齿号进行校验的一种实施情况,具体地,第2个泵油齿号与第1个泵油齿号作差,即得到差值1,所述差值1经过绝对值运算器进行绝对值计算,然后与120/n+a进行比较,当差值1的绝对值小于等于120/n+a时,则对差值1的校验通过,a为允许的齿数误差,齿数误差a一般可取1或2,具体可以根据需要选择,以能满足实际的校验需求为准。
70.其他的校验情况,可以参照上述第2个泵油齿号与第1个泵油齿号作差,以及进行相对应校验的情况说明。对第n个泵油齿号与第1个泵油齿号校验时,则需要与120*(n-1)/n+a进行比较。
71.采用图3的方式进行校验时,当校验通过的数量与n相一致时,则对泵油时刻的校验通过,否则,对泵油时刻的校验不通过,需要复位,复位后,即需要重新进入等待overrun工况以及相应的介入识别步骤,如图1所示。
72.本发明的一个实施例中,校验通过后,将所确定泵油齿号存储。
73.将所确定的泵油齿号存储后,可便于后续发动机工作时,有效实现对轨压控制,如可有效解决轨压波动较大的问题。当然,在将确定的泵油齿号存储后,在进行介入识别条件判断时,可以根据存储状态进行判断。如存储有泵油齿号,则不满足介入识别条件,即不用执行上述提到对泵油时刻识别的步骤以及过程。一般地,泵油齿号可以存储在eeprom内,具体存储的位置,以及后续发动机电控单元(ecu)读取识别的情况可均与现有相一致,具体为本技术领域人员所熟知,以能满足实际的轨压控制为准。
74.综上,可得到介入式识别发动机泵油时刻的装置,包括
75.位置传感器,用于获取曲轴信号盘上信号盘齿的位置状态;
76.轨压传感器,用于采集信号盘齿相对应的盘齿当前轨压;
77.识别控制器,识别确定发动机进入等待overrun工况,在等待overrun工况下满足介入识别条件时,配置介入设定轨压,以控制发动机基于所述介入设定轨压下泵油;
78.对基于介入设定轨压下的一发动机工作循环,识别控制器采集曲轴位置传感器所获取信号盘齿的位置状态以及轨压传感器所获取的盘齿当前轨压,以生成相应的工作齿以及与所述工作齿相对应的工作齿当前轨压状态;
79.基于发动机工作循环下所有工作齿相对应的工作齿当前轨压状态,所述识别控制器确定在发动机工作循环下满足泵油特性的泵油齿号,以利用所述泵油齿号表征油泵的泵油时刻,其中,所述泵油齿号为满足泵油特性工作齿在发动机工作循环下的编号。
80.图4中,位置传感器、轨压传感器、识别控制器均可采用现有常用的形式,如位置传感器可采用现有常用的曲轴位置传感器,以能与曲轴信号盘上的信号盘齿对应,以识别相应得到信号盘齿均可;利用轨压传感器能获取相应的盘齿当前轨压,具体获取盘齿当前轨压的方式以及原理均可与现有相一致。
81.识别控制器,包括发动机电控单元,还可以包括计数器、用于识别发动机overrun工况等情况的设备,具体可以根据需要选择。通过识别控制器,具体完成介入识别发动机泵油时刻,具体实施完成介入识别发动机泵油时刻的过程可参考上述说明,此处不再赘述。
82.本发明的一个实施例中,还提供介入式识别发动机泵油时刻的存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
83.本技术的一个实施例中,如果以软件功能模块的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,执行本发明各个实施例所述方法的全部或部分步骤。
84.具体地,存储器、存储介质可以是计算机可读存储介质,例如,所述计算机可读存储介质可以是rom、随机存取存储器(ram)、cd-rom、磁带、软盘和光数据存储设备等。
85.以上是对本发明的较佳实施进行了具体说明,但本发明并不局限于上述实施方式,熟悉本领域的技术人员在不违背本发明精神的前提下还可作出种种的等同变形或替换,这些等同的变形或替换均包含在本发明权利要求所限定的范围内。以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1