可折叠高空做功系统及其做功方法与流程
1.本发明涉及利用高空风能的发电系统,具体涉及一种可折叠高空做功系统及其做功方法。
背景技术:
2.风能是清洁能源之一,我国风能资源丰富,可开发利用的风能储量约10亿kw。将高空风能进行发电的技术之一是利用连接到地面发电装置的做功伞上下运动做功,拉动发电装置做机械运动,进而将风能转换为电能。
3.申请号为cn200910190150.2的发明专利公开了一种大功率伞型风力发电系统。该系统包括轨道绳、升力导引体、至少一组伞梯和发电装置。其中,轨道绳的一端穿过伞梯系住升力导引体,另一端紧固于地面重物;所述伞梯包括承力伞和做功伞,承力伞至少有三根细绳,每一根细绳的一端系住伞的边沿,另一端的细绳紧固于所述轨道绳;做功伞少有三根细绳,每一根细绳的一端系住伞的边沿,另一端的细绳紧固于可在轨道绳滑动的滑块上;每一个做功伞在轨道绳上都有上档块及下档块,其运动轨道在上档块与下档块之间;每一个伞都与其相邻的伞之间保持有距离;升力导引体与其相邻的伞之间也保持有距离;做功伞在所述轨道绳上下滑动,做功伞连有做功绳,做功绳一端紧固连接做功伞,另一端连接发电装置,拉动发电装置做机械运动。
4.上述方案采取的技术路线是利用做功伞在轨道绳上的上下滑动带动做功绳做功,需要驱动器在绳上行走以控制做功伞的开合状态,采用该方式易造成轨道绳的磨损,降低风力发电系统的使用寿命和工作效率。
技术实现要素:
5.本发明要解决的技术问题是现有采用的通过做功伞在轨道绳上下滑动的做功方式易造成绳索的磨损,降低高空风力发电系统的使用寿命和工作效率等。
6.为解决以上技术问题,本发明采用以下技术方案:
7.提供一种可折叠高空做功系统,包括连接到地面系统的做功绳,所述做功绳由上至下依次设有平衡模块和做功模块;所述做功模块固定连接在所述做功绳上且具有迎风面;所述做功模块在到达做功下限高度处自动展开所述迎风面,在到达做功上限高度处自动折叠所述迎风面。
8.进一步地,所述做功模块具有帆状构型,所述帆状构型的帆面构成所述迎风面,所述帆面连接至用于控制所述帆面展开或折叠的帆面控制模块。
9.进一步地,所述帆面设有第一可收缩件,所述帆面控制模块与所述第一可收缩件连接,通过控制所述第一可收缩件的收缩或展开来控制所述帆面的折叠或展开。
10.更进一步地,所述帆面控制模块还包括旋转器;所述旋转器与所述第一可收缩件连接,用于控制所述帆面的折叠或展开的角度。
11.进一步地,所述帆面通过第二可收缩件连接至第二控制模块;所述第二控制模块
位于所述帆面下方并固定连接在所述做功绳上,通过控制所述第二可收缩件的展开或收缩来控制所述帆面的折叠或展开。
12.进一步地,所述系统包括供电模块,所述供电模块为所述帆面控制模块和所述第二控制模块提供电力;所述系统还包括控制器、用于获取高度和风速的传感器和无线传输模块,所述控制器通过所述无线传输模块连接至所述帆面控制模块和所述第二控制模块。
13.进一步地,所述平衡模块包括氦气球。
14.更进一步地,所述系统包括至少一个所述做功模块。
15.为解决上述技术问题,本发明还提供一种可折叠高空做功系统的做功方法,其中,做功模块固定连接在做功绳上,所述方法包括以下步骤:
16.1)所述做功模块到达做功下限高度处时自动展开迎风面,地面系统松开所述做功绳使其继续上升,通过所述做功绳驱动所述地面系统工作;
17.2)所述做功模块到达做功上限高度处时自动折叠所述迎风面,所述地面系统收回所述做功绳,使所述做功模块下降到所述做功下限高度处;
18.3)循环重复所述步骤1)和2)。
19.进一步地,所述方法还包括根据风速和高度控制所述迎风面展开或折叠角度的步骤。
20.本发明要求保护的技术方案取得了以下有益效果:
21.1)做功模块直接固定连接在做功绳上,做功模块随着做功绳的上升/下降而上升/下降,避免了做功模块需在轨道绳上下活动的设计,简化了高空风力发电系统的结构,避免了对做功系统中绳索的磨损,提高了高空风力发电系统的使用寿命和工作效率。
22.2)通过帆面控制模块控制第一帆面收纳绳和第二帆面收纳绳的长度以及帆面的角度,通过第二控制模块控制帆绳的长度,实现了对帆面张开的迎风面的调整,从而实现输出功率的精细化调控。
23.3)通过在做功绳上不同位置搭载多个做功模块,能够实现大功率输出和输出功率的机动动态调整。
附图说明
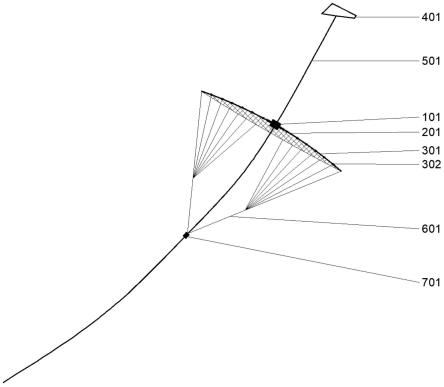
24.图1为可折叠高空做功系统展开状态示意图;
25.图2为可折叠高空做功系统帆面俯视图(左)和帆面侧视图(右);
26.图3为可折叠高空做功系统折叠状态示意图(处于初始或下行位置);
27.图4为可折叠高空做功系统在做功下限高度处开始展开帆面示意图;
28.图5为可折叠高空做功系统在做功上限高度处开始折叠帆面示意图;
29.图6为包含多个做功模块的可折叠高空做功系统示意图;
30.图7为帆面控制模块具体结构示意图。
31.附图标记:101-帆面控制模块;102-可旋转套筒;201-第一帆面收纳绳;202-第二帆面收纳绳;301-帆面;302-耳绳;401-氦气球;501-做功绳;601-帆绳;701-第二控制模块。
具体实施方式
32.以下结合附图和具体实施例,对本发明要求保护的技术方案作进一步清楚的描
述。
33.实施例1
34.如图1-7所示,本实施例中的可折叠高空做功系统包括连接到地面系统的做功绳501,所述做功绳501由上至下依次设有平衡模块和做功模块;所述做功模块固定连接在所述做功绳501上且具有迎风面;所述做功模块在到达做功下限高度处自动展开所述迎风面,在到达做功上限高度处自动折叠所述迎风面。整个系统通过做功绳501连接到地面系统给地面模组(如发电机或其它机械设备)提供动力。
35.在本实施例中,做功下限高度主要是考虑切入风速和海拔高度,可以通过风速计和高度计实现做功高度区间的自主可控,同时也可根据实际需要,采用无线模组实现地面站点的人工介入调整。类似于做功下限高度的确定,可以采用风速计和高度计,同时结合无线模组对做功绳501的拉升长度进行确定。
36.具体地,所述做功模块具有帆状构型,所述帆状构型的帆面301构成所述迎风面,所述帆面301连接至用于控制所述帆面301展开或折叠的帆面控制模块101,所述帆面控制模块101设置在上帆面的中心并固定连接在所述做功绳501上,做功绳501穿过帆面控制模块101的中心。其中,帆面材料可以采用超高分子聚乙烯等低密度高强度耐腐蚀的柔性面料,以满足做功需求和可靠性需求。
37.具体地,所述帆面301设有第一可收缩件,所述帆面控制模块101与所述第一可收缩件连接,通过控制所述第一可收缩件的收缩或展开来控制所述帆面301的折叠或展开。其中,所述第一可收缩件可设置为与帆面301连接的帆面收纳绳,所述帆面收纳绳包括在上帆面相互垂直设置的第一帆面收纳绳201和第二帆面收纳绳202,在帆面301上还设有配合第一帆面收纳绳201及第二帆面收纳绳202实现帆面伸缩收纳的数个耳绳302,第一帆面收纳绳201及第二帆面收纳绳202分别穿过耳绳302。
38.帆面控制模块101设有小功率卷扬机,该卷扬机与帆面收纳绳连接,通过控制帆面收纳绳的卷、扬及其长度来控制帆面301的折叠或展开。根据使用情况,也可采用低密度、高强度的刚性伸缩系统来代替收纳绳。
39.更具体地,所述帆面控制模块101还包括旋转器;所述旋转器与所述第一可收缩件连接,用于控制所述帆面301的折叠或展开的角度。旋转器可设置为可旋转套筒102,帆面收纳绳穿过该可旋转套筒102,可旋转套筒102的设置使帆面301的边缘可围绕卷扬机轴可控旋转,避免进行帆面301的折叠收缩时卷入帆面收纳绳,并且能够控制收纳折叠时帆面的方向,利于帆面迎风展开。
40.具体地,本实施例中的可旋转套筒102具有三个作用。其中一个作用是便于收纳绳回收,可以对比附图1和附图5。在图1所示的具有最大迎风面的情况下,可旋转套筒几乎与做功绳501垂直。在附图5所示的情况下,释放帆绳后,高空风能将帆面吹翻上扬,这时可旋转套筒102也会顺势向上旋转到一个合适角度,便于帆面收纳绳201的收回。
41.套筒的另一个作用是,如附图4所示,在准备展开帆面时,在套筒向上的情况下,会让帆面形成一个较小的迎风口,从而使得帆面逐步向正确的方向顺势吹开。套筒的第三个作用是,在高空风能密度超出额定需求的情况下,通过适当减小帆绳601的释放长度,并适当调整旋转套筒角度(向下旋转),这时帆面迎风面积会较附图1这种情况小,从而达到调整输出功率的目的。
42.具体地,所述帆面301通过第二可收缩件连接至第二控制模块701;所述第二控制模块701位于所述帆面301下方并固定连接在所述做功绳501上,通过控制所述第二可收缩件的展开或收缩来控制所述帆面301的折叠或展开。其中,第二可收缩件可设置为与帆面301连接的帆绳601。第二控制模块701也设有小功率卷扬机,该卷扬机与帆绳连接,通过控制帆面绳的扬、卷及其长度来控制帆面301的折叠或展开。
43.具体地,所述系统包括供电模块,所述供电模块为所述帆面控制模块101和所述第二控制模块701提供电力。其中,系统消耗的电力来源于设置于做功模块附近的风力发电装置,系统电力可以通过包裹在做功绳501芯部或外置于做功绳外的供电线传输。所述还包括控制器、用于获取高度和风速的传感器模块和无线传输模块,控制器通过无线传输模块连接至帆面控制模块101和第二控制模块701。
44.其中,传感器模块将获取的高度和风速等信息传输给控制器,控制器通过控制帆面控制模块101和第二控制模块701中的卷扬机(及旋转套筒)来实现对帆面301的展开/折叠程度和角度的控制。
45.具体地,所述平衡模块包括氦气球401。对于一个做功模块的系统而言,做功模块应位于平衡模块下部的安全距离,即做功模块的帆面301到达做功最高点实现翻折时,不会触碰到平衡模块及相关组件(如前述的风力发电装置等,因结构简单,本文未具体表述)。
46.本实施例提供的可折叠高空动力帆系统的做功过程如下(以含一个做功模块为例):
47.1)如图3所示,系统通过401氦气球平衡模块平衡系统主体配重,并保持做功绳的大致拉升方向。当做功绳501处于下行状态时,帆面控制模块101通过控制卷扬机拉紧第一帆面收纳绳201和第二帆面收纳绳202使得帆面301处于折叠状态,这样帆面301不具备明显迎风面,从而利于帆面301随做功绳501回收到做功下限高度。
48.2)如图4所示,当系统达到做功初始位置(即做功下限高度)时,帆面控制模块101控制卷扬机松开第一帆面收纳绳201和第二帆面收纳绳202,使帆面301能够自由伸展。同时,第二控制模块701通过卷扬机拉动帆绳601,同时配合帆面控制模块101中可旋转套筒102,使得帆面301具备一定的迎风面。这时高空风力会快速吹开帆面301,并带动第一帆面收纳绳201和第二帆面收纳绳202伸展,且逐步对帆绳601产生拉力。当第二控制模块701控制帆绳601的长度伸展到合适位置(如做功半径)时立即卡紧(通过卷扬机刹车系统或另设的卡紧装置)帆绳601,不再伸长帆绳601。
49.3)如图1所示,当帆面301展开到合适大小后,帆面控制模块101也立即卡紧第一帆面收纳绳201和第二帆面收纳绳202,同时卡紧(通过卷扬机刹车系统或另设的卡紧装置)可旋转套筒102的角度到合适位置。这时高空风力通过帆面301对帆绳601产生巨大拉力,并传递给做功绳501,再通过做功绳501驱动地面系统工作。
50.4)如图5所示,当做功绳运行到上限位(即做功上限高度)时,第二控制模块701快速松开帆绳601,同时帆面控制模块101也松开可旋转套筒102的角度卡锁,帆面301在高空风力的带动下翻转,使得迎风面迅速减小。
51.5)接着,帆面控制模块101快速收回第一帆面收纳绳201和第二帆面收纳绳202,使得帆面301迅速折叠,进一步将帆面301迎风面减小到最低。同时,第二控制模块701也配合收回帆绳601使其处于合适的长度。做完相关动作,帆面301的形态复原到图3的初始状态。
52.6)当帆面301处于折叠状态时,地面系统只需要较小的力就可以快速通过卷扬机收回做功绳501,使帆下降到做功下限高度,接着系统开始新一轮的做功。
53.实施例2
54.本实施提供的可折叠高空动力帆系统为由多个做功模块呈阶梯式排列组成(如图6所示)。其中,最顶部帆面301位置的设置与实施例1类似,其下帆组依次按安全距离排开即可。其余结构与做功原理与实施例1一致。
55.以上所述的实施例仅是对本发明做示例性描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1