用于调节涡轮机的方法与流程
本发明涉及一种用于飞行器的涡轮机,具体来说涉及使用电辅助调节涡轮机。
背景技术:
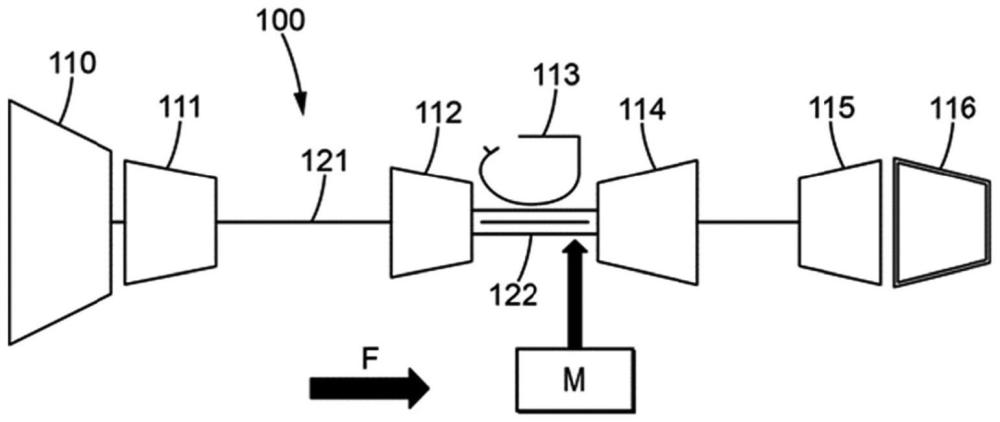
1、已知涡轮机100类似于文献fr 3087491中描述的涡轮机,如图1中示意性地表示,其是用于飞行器的双流双体涡轮喷气型涡轮机。涡轮机100在气流f的方向上从上游向下游包括风扇110、低压压缩机111、高压压缩机112、接收燃料流设定点的燃烧室113、高压涡轮114、低压涡轮115,和初级排气喷嘴116。低压(或lp)压缩机111和低压涡轮115通过低压轴121连接且一起形成低压主体。高压(或hp)压缩机112和高压涡轮114通过高压轴122连接且一起与燃烧室形成生成热气体的高压主体。由hp轴121驱动的风扇110压缩收入的空气。此空气在风扇110的下游划分为次级空气流和“初级”流,所述次级空气流直接导向次级喷嘴(未图示),穿过所述次级喷嘴射出以促成由涡轮机100提供的推力,所述“初级”流进入由低压主体和高压主体组成的气体生成器,接着射出到初级喷嘴116中。
2、lp轴121和hp轴122通常不按相同速度旋转,且其不具有相同惯性。因此,尤其是在加速阶段中,部分地归因于其不同惯性,lp压缩机111比hp压缩机112(称为速度n2)更慢地(称为速度n1)加速。因而得到这样的情形:lp压缩机111压缩比hp压缩机112可接收的空气更多的空气。此情形导致lp压缩机111的区域内喘振的风险。此现象对应于所涉及压缩机的下游压力的明显且快速波动。一旦其开始,喘振就可能导致熄灭燃烧室。其还导致压缩机叶片明显颠簸,且因此可能导致机械损坏。
3、涡轮机100的设计需要包含对于喘振现象的足够的容限。压缩机在使用期间的操作整体上由一张图表示,该图表达出口与入口之间获得的压力比作为通过其中的空气流的函数;此图还根据压缩机的旋转速度而参数化。图中出现喘振线,其构成压缩比的最大限度,不应超过所述最大限度以免出现喘振现象。以已知方式,定义工作线,其关联当涡轮机100正稳定操作时作为燃料流的函数获得的压缩比。此工作线的定位取决于涡轮机100的设计者的判断,且此工作线到喘振线的距离表示喘振容限。应注意,高压压缩机的效率(被供应到空气的压缩功,相比于驱动其旋转所消耗的功)随着我们接近喘振线而变得更好(作为第一近似值)。相反,当以稳定操作开始时由飞行员为了获得推力的增加而请求的加速度(瞬变阶段)在压缩机处转化为在喘振线的方向上发生的操作点的偏差。
4、用于控制涡轮机的当前解决方案涉及用于燃料流调节的多个逻辑原理。在稳定阶段期间,待供应到涡轮机的燃料流被计算为控制设定点与当前速度之间的lp轴121的速度n1的差的函数。在瞬变阶段期间,激活hp轴122的速度n2下的调节环路以便控制加速度和hp压缩机112的场内的操作点的偏差。调节环路基于作为当前速度的函数的hp轴122的速度n2的时间导数简档生成加速度路径,这使得有可能安全地加速涡轮机。然而,在涡轮机100遇到的例如热区、高海拔或极高要求的机械条件等苛刻环境条件下,可能达到维持相对于喘振线的安全容限的操作限度。这导致加速期间可注入的燃料流受到限制,且因此导致加速性能降级。因此,存在阻止实施针对hp轴122的速度n2初始规划的路径的风险。为了避免此情形,一个解决方案在于,通过提供由电马达产生的扭矩以在限制燃料流率的同时恢复速度n2下hp轴122的加速性能来使用hp轴122的杂化。然而,经由电马达提供机械扭矩导致由hp涡轮和燃烧室生成且注入到lp涡轮中的热气体的功率亏损。这导致相比于仅使用燃料实现的标称加速度,在使用对hp轴122的电辅助的情况下,速度n1下lp轴121的加速发生延迟。
5、因此需要提供在经由电马达提供机械扭矩时用以补偿或限制lp轴121的加速延迟的调节构件。
技术实现思路
1、为此,本文提出一种用于调节涡轮机的方法,所述涡轮机包括连接到高压轴的高压涡轮和连接到低压轴的低压涡轮,离开高压涡轮的热气体驱动低压涡轮,所述方法包括:
2、a-在持续辅助周期期间,借助于电机以电气方式辅助高压轴,以便为所述高压轴提供来自被供应到电机的电能的机械能以增补来自涡轮机的燃烧室的热能,持续辅助周期,以及
3、b-校正低压轴的速度以便达到先前在不存在电辅助的情况下确定的低压轴的参考速度。
4、所述方法使得有可能在以电气方式辅助高压轴的阶段期间限制低压轴的加速度的损耗。所述方法因此允许补偿电辅助阶段期间经历的加速度的损耗,使得最终lp轴的加速时间与非混合加速或无电辅助的情况下的加速时间相同。
5、低压轴的速度以及相应地高压轴的速度可以是低压轴的经减小速度以及相应地高压轴的速度。
6、可在不存在对hp轴的任何电辅助的情况下针对涡轮机的多个操作时刻预先确定lp轴的参考速度。
7、可在不存在对hp轴的任何电辅助的情况下针对hp轴的多个操作速度预先确定lp轴的参考速度。
8、可以实验方式或通过模拟确定低压轴的参考速度。
9、涡轮机可包括风扇,其定位在热气体生成器的上游且限定初级流和次级流。热气体生成器由初级流穿越且包括高压压缩机、燃烧室和高压涡轮。
10、涡轮机可包括电马达,其使得有可能在电辅助阶段期间向高压轴提供辅助扭矩。
11、所述方法可包括以下步骤:
12、b1-在辅助周期期间确定高压涡轮的出口处的能量亏损,作为在不存在电辅助的情况下所生成热气体的功率与热气体的参考功率之间的差的函数,
13、b2-计算待借助于电机在高压轴处收集的机械扭矩,作为所述能量亏损的函数,
14、b3-在辅助周期结束时,收集待借助于电机从高压轴收集的所述机械扭矩。
15、可控制电机以收集在步骤b2中计算的机械扭矩来制动高压轴。这具有如下效应:增加待供应到涡轮机的燃烧室的燃料流以便将高压轴的速度维持在设定的速度水平,具体来说遵循高压轴的加速度路径。
16、可在不存在对高压轴的任何电辅助的情况下针对涡轮机的多个操作时刻预先确定热气体的参考功率。此确定可以实验方式或通过模拟实行。
17、可实行步骤b3直至高压轴的给定速度下的热气体的功率大于或等于高压轴的相同给定速度下的热气体的参考功率。
18、步骤b1可包括以下子步骤:
19、-对于辅助周期的每一时刻,计算在不存在电辅助的情况下所生成热气体的功率与热气体的参考功率之间的差,
20、-通过对辅助周期内所计算的差进行积分来计算能量亏损。
21、两个连续时刻可由预定持续时间分隔,所述预定持续时间可以是涡轮机的控制回路的持续时间。
22、步骤b2可包括以下子步骤:
23、-提供用于达到低压轴的参考速度的目标时刻,
24、-计算平均功率作为能量亏损和目标时刻的函数,
25、-计算待借助于电机收集的机械扭矩作为平均功率的函数,以便将所述平均功率供应到低压轴。
26、可根据以下公式计算平均功率:
27、[数学函数1]
28、
29、其中为平均功率,ed为能量亏损,ttar为目标时刻,且tassist为电辅助周期的持续时间。
30、待由电机收集的机械扭矩可使用预先建立的定律计算为平均功率的函数。
31、所生成热气体的功率可被确定为高压轴的速度和借助于电机生成的机械辅助扭矩的函数。举例来说,可通过查询先前建立的含有热气体的功率的值相对于高压轴的速度值和借助于电机供应的机械辅助扭矩的值的数据库来确定热气体的功率。
32、热气体的参考功率可先前被确定为在借助于电机生成的机械辅助扭矩为零时高压轴的速度的函数。举例来说,可通过查询先前建立的包括热气体的参考功率的值的数据库将热气体的参考功率确定为高压轴的速度值的函数。
33、所述方法可包括以下操作:
34、b1’-确定校正系数作为借助于电机生成的机械辅助扭矩的函数,以及
35、b2’-调节高压轴的速度作为校正系数的函数。
36、校正系数可被确定为高压轴在涡轮机的操作时刻的速度和高压轴的经校正速度的函数。
37、可根据以下操作确定高压轴的经校正速度:
38、-测量在所述操作时刻,具体地在电辅助阶段期间高压轴的速度,
39、-确定在不存在电辅助的情况下对于所述操作时刻来说对应于高压轴的速度的热气体的参考功率,以及
40、-确定高压轴的经校正速度作为在所述操作时刻所述热气体的参考功率和借助于电机生成的机械辅助扭矩的函数。
41、因此,高压轴的经校正速度可被配置成在每一操作时刻产生电辅助期间热气体的功率,其等效于在不存在电辅助的情况下在高压轴的相同速度下热气体的功率。
42、所述校正系数可以是高压轴的经校正速度与不存在电辅助的情况下高压轴的参考速度之间的比率。
43、操作b2’可包括以下子操作:
44、-提供用于高压轴的加速度路径,
45、-将校正系数应用于高压轴的加速度路径,
46、-控制高压轴的速度以遵循高压轴的经校正加速度路径的路径。
47、高压轴的速度以及相应地低压轴的速度可由高压轴以及相应地低压轴的旋转速度或加速度来确定。
48、涡轮机可以是飞行器涡轮机。
49、本文还涉及一种包括指令的计算机程序,所述指令用于在所述程序由处理器执行时执行上述操作。
50、本文还涉及一种装置,其包括被配置成实施如上文所提及的方法的构件。
51、本文还涉及一种装置,其包括被配置成校正低压轴的速度且被配置成实施上述方法的构件。
- 还没有人留言评论。精彩留言会获得点赞!