风电机组的控制方法、系统、电子设备及存储介质
本公开涉及风电机组控制,特别涉及一种风电机组的控制方法、系统、电子设备及存储介质。
背景技术:
1、风电机组是一种利用风能转换为电能的设备,由多个组件组成。主要包括风轮(叶片)、发电机、变流器、塔架和控制系统等部分。风轮通过受风驱动旋转,激活发电机产生电能,并通过输电系统将电能输送到电网或其他用电设备。
2、随着对风能的需求日益增加,风电机组的额定功率和关键支持结构的尺寸均进行了大型化设计,导致了风电机组结构的柔性特征明显。
3、并且,大型的风电机组复杂气动载荷的影响,容易发生弹性变形,从而导致塔架的载荷增加,进而影响风电机组运行的稳定性和使用寿命。
4、目前,可以通过控制叶片桨距角和发电机转矩来调节塔架的结构阻尼,例如在对叶片桨距角的控制过程中,加入主动阻尼控制回路以降低振荡,实现在不增加额外的结构的情况下,降低塔架的载荷。但此方法降低的主要是塔架前后方向的载荷,无法有效地优化塔架侧向的载荷。
5、还可以在发电机转矩的控制过程中,通过抑制塔架侧向的变形加速度降低塔架的载荷。但塔架侧向的变形加速度主要通过传感器进行实时测量,具有明显的非线性特征,难以被直接预测。
6、或者是采用多变量控制策略,抑制功率输出质量和塔架的侧向振荡,以实现降低塔架侧向的载荷。但非线性变量组成的多目标成本函数难以被求解,导致多变量控制策略难以实现。
技术实现思路
1、本公开为了解决上述技术问题,提供一种风电机组的控制方法、系统、电子设备及存储介质。
2、本公开是通过下述技术方案来解决上述技术问题:
3、第一方面,本公开提供一种风电机组的控制方法。所述风电机组包括发电机和塔架。
4、所述控制方法的步骤包括:
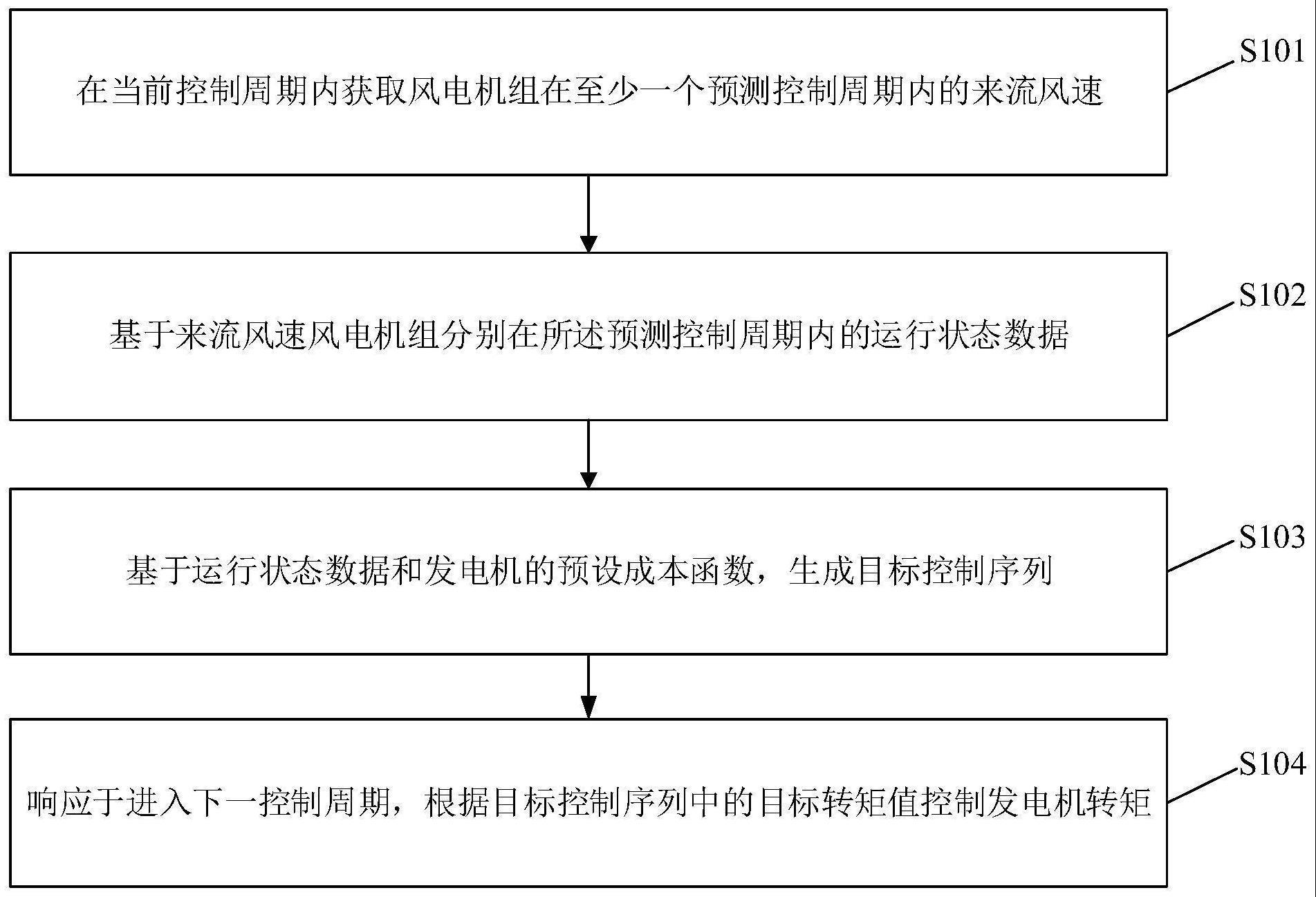
5、在当前控制周期内获取所述风电机组在至少一个预测控制周期内的来流风速;
6、基于所述来流风速获取所述风电机组分别在所述预测控制周期内的运行状态数据;其中,所述运行状态数据包括预测风能捕获功率、理想风能捕获功率以及所述塔架侧向的形变加速度;
7、基于所述运行状态数据和所述发电机的预设成本函数,生成目标控制序列;其中,所述目标控制序列包括分别与所述预测控制周期对应的发电机转矩的目标转矩值;
8、响应于进入下一控制周期,根据所述目标控制序列中的所述目标转矩值控制所述发电机转矩。
9、可选地,所述预设成本函数表示为:
10、
11、其中,用于表征从第1个所述预测控制周期至第n个所述预测控制周期分别对应的所述发电机转矩,f1用于表征第一权重因子,f2用于表征第二权重因子,n用于表征所述预测控制周期的数量,ts用于表征所述预测控制周期的时长,pi用于表征在第i个所述预测控制周期内所述预测风能捕获功率,用于表征在第i个所述预测控制周期内所述理想风能捕获功率,用于表征在第i个所述预测控制周期内的所述形变加速度,用于表征预设最大形变加速度记录值;
12、所述测风能捕获功率、所述理想风能捕获功率以及所述形变加速度均基于所述发电机转矩进行表示。
13、可选地,所述基于所述运行状态数据和所述发电机的预设成本函数,生成目标控制序列的步骤包括:
14、使用粒子群算法分别在多个不同的求解方向对转矩控制序列和迭代变化率进行迭代计算,直到所述迭代计算的次数达到预设迭代次数,获取所述目标控制序列;
15、其中,所述目标控制序列为在所有所述求解方向中所述预设成本函数取全局最小值时对应的所述转矩控制序列。
16、可选地,所述迭代计算的公式为:
17、
18、
19、其中,用于表征第j次进行迭代计算得到的所述转矩控制序列,用于表征第j次进行迭代计算得到的所述迭代变化率,用于表征在所述求解方向的前j次迭代计算中所述预设成本函数取最小值时对应的所述转矩控制序列,用于表征在所有所述求解方向的前j次迭代计算中所述预设成本函数取全局最小值时对应的所述转矩控制序列,c1和c2分别用于表征学习因子,r1和r2分别用于表征预设参数,用于表征惯性权重。
20、可选地,所述风电机组还包括风轮;
21、所述基于所述来流风速获取所述风电机组在所述预测控制周期内的运行状态数据的步骤包括:
22、根据在所述当前控制周期的上一控制周期内的实际转子转速、实际来流风速、实际能量转化效率和实际转矩值,以及在每个所述预测控制周期内的所述来流风速,利用风能捕获预测模型获取所述风轮在所述预测控制周期内的转子转速,以及所述风电机组在所述预测控制周期内的所述预测风能捕获功率、所述理想风能捕获功率。
23、可选地,所述基于所述来流风速获取所述风电机组在所述预测控制周期内的运行状态数据的步骤还包括:
24、根据所述当前控制周期和上一控制周期各自的实际来流风速、实际运行状态数据、实际目标转矩值,以及在每个所述预测控制周期内的来流风速和运行状态数据,利用形变加速度预测模型依次预测得到在预测控制周期内的形变加速度。
25、可选地,所述风能捕获预测模型表示为:
26、
27、
28、
29、
30、
31、
32、其中,用于表征在第i个所述预测控制周期内所述预测风能捕获功率,用于表征在第i个所述预测控制周期内所述理想风能捕获功率,用于表征在第i个所述预测控制周期内的能量转化效率,用于表征所述能量转化效率的预设最大值,用于表征在第i个所述预测控制周期内的所述来流风速,为在第i个所述预测控制周期内的所述来流风速对应的桨距角理论值,λi用于表征在第i个所述预测控制周期内的叶尖速比值,用于表征在第i个所述预测控制周期内所述风轮的转子转速,ngear用于表征所述风电机组的齿轮箱变比,jrotor用于表征所述风轮的转动惯量,ω0用于表征在所述当前控制周期内所述风轮的实际转子转速,a1、a2、a3、a4、a5、a6、b1、b2分别用于表征预设参数。
33、可选地,所述形变加速度预测模型表示为:
34、
35、
36、其中,f用于表征形变加速度预测模型,用于表征在第i个所述预测控制周期内的所述形变加速度,xi用于表征在第i个所述预测控制周期内的所述运行状态数据,用于表征第i个所述预测控制周期对应的所述发电机转矩,用于表征在第i个所述预测控制周期内的所述来流风速。
37、可选地,所述形变加速度预测模型为支持向量机,所述形变加速度预测模型中的核函数采用高斯核函数;其中,所述形变加速度预测模型根据所述风电机组的历史运行状态数据、历史转矩数据以及历史来流风速数据训练得到。
38、第二方面,本公开提供一种风电机组的控制系统。所述风电机组包括发电机和塔架。
39、所述控制系统包括:
40、风速获取模块,用于在当前控制周期内获取所述风电机组在至少一个预测控制周期内的来流风速;
41、状态数据预测模块,用于基于所述来流风速获取所述风电机组分别在所述预测控制周期内的运行状态数据;其中,所述运行状态数据包括预测风能捕获功率、理想风能捕获功率以及所述塔架侧向的形变加速度;
42、解算模块,用于基于所述运行状态数据和所述发电机的预设成本函数,生成目标控制序列;其中,所述目标控制序列包括分别与所述预测控制周期对应的发电机转矩的目标转矩值;
43、控制模块,用于响应于进入下一控制周期,根据所述目标控制序列中的所述目标转矩值控制所述发电机转矩。
44、可选地,所述预设成本函数表示为:
45、
46、其中,用于表征从第1个所述预测控制周期至第n个所述预测控制周期分别对应的所述发电机转矩,f1用于表征第一权重因子,f2用于表征第二权重因子,n用于表征所述预测控制周期的数量,ts用于表征所述预测控制周期的时长,pi用于表征在第i个所述预测控制周期内所述预测风能捕获功率,用于表征在第i个所述预测控制周期内所述理想风能捕获功率,用于表征在第i个所述预测控制周期内的所述形变加速度,用于表征预设最大形变加速度记录值;
47、所述测风能捕获功率、所述理想风能捕获功率以及所述形变加速度均基于所述发电机转矩进行表示。
48、可选地,所述解算模块具体用于使用粒子群算法分别在多个不同的求解方向对转矩控制序列和迭代变化率进行迭代计算,直到所述迭代计算的次数达到预设迭代次数,获取所述目标控制序列;
49、其中,所述目标控制序列为在所有所述求解方向中所述预设成本函数取全局最小值时对应的所述转矩控制序列。
50、可选地,所述迭代计算的公式为:
51、
52、
53、其中,用于表征第j次进行迭代计算得到的所述转矩控制序列,用于表征第j次进行迭代计算得到的所述迭代变化率,用于表征在所述求解方向的前j次迭代计算中所述预设成本函数取最小值时对应的所述转矩控制序列,用于表征在所有所述求解方向的前j次迭代计算中所述预设成本函数取全局最小值时对应的所述转矩控制序列,c1和c2分别用于表征学习因子,r1和r2分别用于表征预设参数,用于表征惯性权重。
54、可选地,所述风电机组还包括风轮;
55、所述状态数据预测模块包括:
56、风能捕获预测单元,用于根据在所述当前控制周期的上一控制周期内的实际转子转速、实际来流风速、实际能量转化效率和实际转矩值,以及在每个所述预测控制周期内的所述来流风速,利用风能捕获预测模型获取所述风轮在所述预测控制周期内的转子转速,以及所述风电机组在所述预测控制周期内的所述预测风能捕获功率、所述理想风能捕获功率。
57、可选地,所述状态数据预测模块包括:
58、形变加速度预测单元,用于根根据所述当前控制周期和上一控制周期各自的实际来流风速、实际运行状态数据、实际目标转矩值,以及在每个所述预测控制周期内的来流风速和运行状态数据,利用形变加速度预测模型依次预测得到在预测控制周期内的形变加速度。
59、可选地,所述风能捕获预测模型表示为:
60、
61、
62、
63、
64、
65、
66、其中,用于表征在第i个所述预测控制周期内所述预测风能捕获功率,用于表征在第i个所述预测控制周期内所述理想风能捕获功率,用于表征在第i个所述预测控制周期内的能量转化效率,用于表征所述能量转化效率的预设最大值,用于表征在第i个所述预测控制周期内的所述来流风速,为在第i个所述预测控制周期内的所述来流风速对应的桨距角理论值,λi用于表征在第i个所述预测控制周期内的叶尖速比值,用于表征在第i个所述预测控制周期内所述风轮的转子转速,ngear用于表征所述风电机组的齿轮箱变比,jrotor用于表征所述风轮的转动惯量,ω0用于表征在所述当前控制周期内所述风轮的实际转子转速,a1、a2、a3、a4、a5、a6、b1、b2分别用于表征预设参数。
67、可选地,所述形变加速度预测模型表示为:
68、
69、
70、其中,f用于表征形变加速度预测模型,用于表征在第i个所述预测控制周期内的所述形变加速度,xi用于表征在第i个所述预测控制周期内的所述运行状态数据,用于表征第i个所述预测控制周期对应的所述发电机转矩,用于表征在第i个所述预测控制周期内的所述来流风速。
71、可选地,所述形变加速度预测模型为支持向量机,所述形变加速度预测模型中的核函数采用高斯核函数;其中,所述形变加速度预测模型根据所述风电机组的历史运行状态数据、历史转矩数据以及历史来流风速数据训练得到。
72、第三方面,本公开提供一种电子设备,包括存储器、处理器及存储在存储器上并用于在处理器上运行的计算机程序,所述处理器执行计算机程序时,实现第一方面所述的控制方法。
73、第四方面,本公开提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现第一方面所述的控制方法。
74、本公开的积极进步效果在于:基于帕累托理论,提出了一种预设成本函数,可以协同优化风电机组的塔架载荷和风能捕获功率,能够有效地对降低风电机组的塔架的侧向结构载荷,提升发电机应用在大型风电机组中的功率输出质量,提高风电机组运行的可靠性和高能效具有重要的工程应用价值。
75、并且,结合建立的风能捕获预测模型以及用于获取塔架侧向的形变加速度的形变加速度预测模型,采用粒子群算法,实时求解上述非线性的预设成本函数,以得到包括每个预测控制周期对应的目标转矩值的目标控制序列,进而使用目标控制序列中的目标转矩值对下一个控制周期中的发电机转矩进行控制。
- 还没有人留言评论。精彩留言会获得点赞!