自动驾驶车辆的油门控制方法、装置、车辆和介质
本发明涉及自动驾驶,特别是涉及一种自动驾驶车辆的油门控制方法、装置、车辆和介质。
背景技术:
1、相关技术中,自动驾驶车辆的油门控制是自动驾驶系统重非常重要的一部分,主要涉及环境感知、决策规划和控制三个方面,在决策规划方面,基于深度学习的目标检测和分类算法,以及基于机器学习的路径规划算法,能够在不同的驾驶场景下自动判断路况,选择核实的行驶路线,并生成相应的油门控制命令,从而实现自动化智能油门调节,然而在复杂的交通场景中,难以对车辆的油门实现精确的控制,从而难以确保车辆行驶的平稳和安全。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够对车辆的油门实现精确控制的自动驾驶车辆的油门控制方法、装置、车辆和介质。
2、一种自动驾驶车辆的油门控制方法,包括以下步骤:
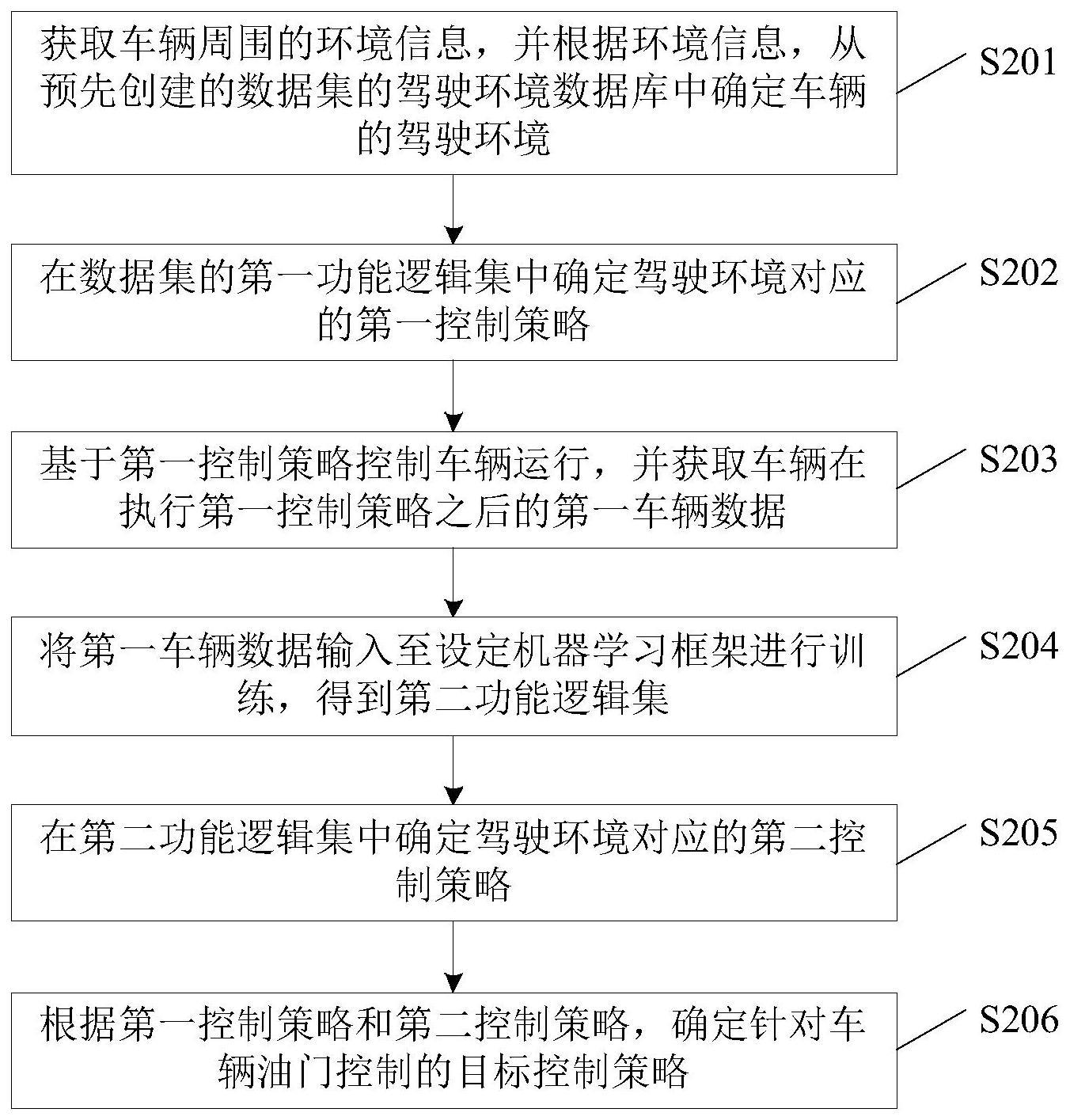
3、获取车辆周围的环境信息,并根据所述环境信息,从预先创建的数据集的驾驶环境数据库中确定所述车辆的驾驶环境;
4、在所述数据集的第一功能逻辑集中确定所述驾驶环境对应的第一控制策略;
5、基于所述第一控制策略控制所述车辆运行,并获取所述车辆在执行所述第一控制策略之后的第一车辆数据;
6、将所述第一车辆数据输入至设定机器学习框架进行训练,得到第二功能逻辑集;
7、在所述第二功能逻辑集中确定所述驾驶环境对应的第二控制策略;
8、根据所述第一控制策略和所述第二控制策略,确定针对车辆油门控制的目标控制策略。
9、一种自动驾驶车辆的油门控制装置,包括:
10、第一确定模块,用于获取车辆周围的环境信息,并根据所述环境信息,从预先创建的数据集的驾驶环境数据库中确定所述车辆的驾驶环境;
11、第二确定模块,用于在所述数据集的第一功能逻辑集中确定所述驾驶环境对应的第一控制策略;
12、获取模块,用于基于所述第一控制策略控制所述车辆运行,并获取所述车辆在执行所述第一控制策略之后的第一车辆数据;
13、训练模块,用于将所述第一车辆数据输入至设定机器学习框架进行训练,得到第二功能逻辑集;
14、第三确定模块,用于在所述第二功能逻辑集中确定所述驾驶环境对应的第二控制策略;
15、第四确定模块,用于根据所述第一控制策略和所述第二控制策略,确定针对车辆油门控制的目标控制策略。
16、一种自动驾驶车辆,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述自动驾驶车辆的油门控制方法的步骤。
17、一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述自动驾驶车辆的油门控制方法的步骤。
18、上述自动驾驶车辆的油门控制方法、装置、车辆和介质,通过车辆周围的环境信息,确定车辆的驾驶环境,并根据车辆的驾驶环境和第一功能逻辑集,确定对应的第一控制策略,再对车辆执行第一控制策略的第一车辆数据进行学习,得到第二功能逻辑集,利用第二功能逻辑集确定第二控制策略,从而通过第一控制策略和第二控制策略,控制车辆的油门,使得可以根据当前的驾驶情况,以有效和安全的方式生成油门控制策略,提高油门控制的效率和准确性。
技术特征:
1.一种自动驾驶车辆的油门控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述第一控制策略和所述第二控制策略,确定针对车辆油门控制单元的目标控制策略,包括:
3.根据权利要求2所述的方法,其特征在于,在所述第一评估得分小于等于第一预设阈值的情况下,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述第一控制策略、所述第二控制策略和所述第三控制策略,确定所述目标控制策略,包括:
5.根据权利要求4所述的方法,其特征在于,在至少两项所述第二评估得分小于等于所述第一预设阈值的情况下,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述环境信息,在存储的驾驶环境数据库中确定所述车辆的驾驶环境,包括:
7.根据权利要求1至4中任一项所述的方法,其特征在于,所述方法还包括:
8.一种自动驾驶车辆的油门控制装置,其特征在于,包括:
9.一种自动驾驶车辆,包括存储器和处理器,所述存储器有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述方法的步骤。
技术总结
本发明公开了一种自动驾驶车辆的油门控制方法、装置、车辆和介质,所述方法包括:获取车辆周围的环境信息,并根据所述环境信息,从预先创建的数据集的驾驶环境数据库中确定所述车辆的驾驶环境;在所述数据集的第一功能逻辑集中确定所述驾驶环境对应的第一控制策略;基于所述第一控制策略控制所述车辆运行,并获取所述车辆在执行所述第一控制策略之后的第一车辆数据;将所述第一车辆数据输入至设定机器学习框架进行训练,得到第二功能逻辑集;在所述第二功能逻辑集中确定所述驾驶环境对应的第二控制策略;根据所述第一控制策略和所述第二控制策略,确定针对车辆油门控制的目标控制策略。采用本方法能够解决油门控制不精确的问题,保证驾驶安全。
技术研发人员:吴征宇,孙川,李浩然,徐林,田良宇,郑四发,许述财,冯斌,张艇洋,魏旺玲,王成,丁聪聪
受保护的技术使用者:清华大学苏州汽车研究院(相城)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!