一种发电机组控制方法、装置、设备及存储介质与流程
本发明涉及风力发电,特别涉及一种发电机组控制方法、装置、设备及存储介质。
背景技术:
1、为响应碳达峰、碳中和国家战略,新能源产业持续蓬勃发展,风力发电作为绿色清洁能源在全球各地广泛并快速推广,伴随风力发电技术创新,风电机组朝着大兆瓦、高塔架、长叶片发展,但同时风电平价上网要求风电机组整机成本不断降低。风电机组载荷的控制和优化是实现机组整机降本的有效途径,且机组载荷优化对提高运行稳定性和降低故障率也具有积极意义。
2、目前,现有的普遍应用的风电机组控制方法是针对发电机转速进行反馈控制,大湍流风况和极端阵风条件下,在发电机转速提升的初始阶段,轮毂中心推力及其关联载荷已达到最大值,基于发电机转速的反馈控制策略难以及时对机组推力及其关联载荷进行有效控制,导致叶片和塔架等关键部件承受极限载荷,对机组设计和降本不利。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种发电机组控制方法、装置、设备及存储介质,能够在有效降低成本的条件下,提高发电机组控制的便利性、准确性以及及时性。其具体方案如下:
2、第一方面,本申请提供了一种发电机组控制方法,应用于预设发电机组控制系统,包括:
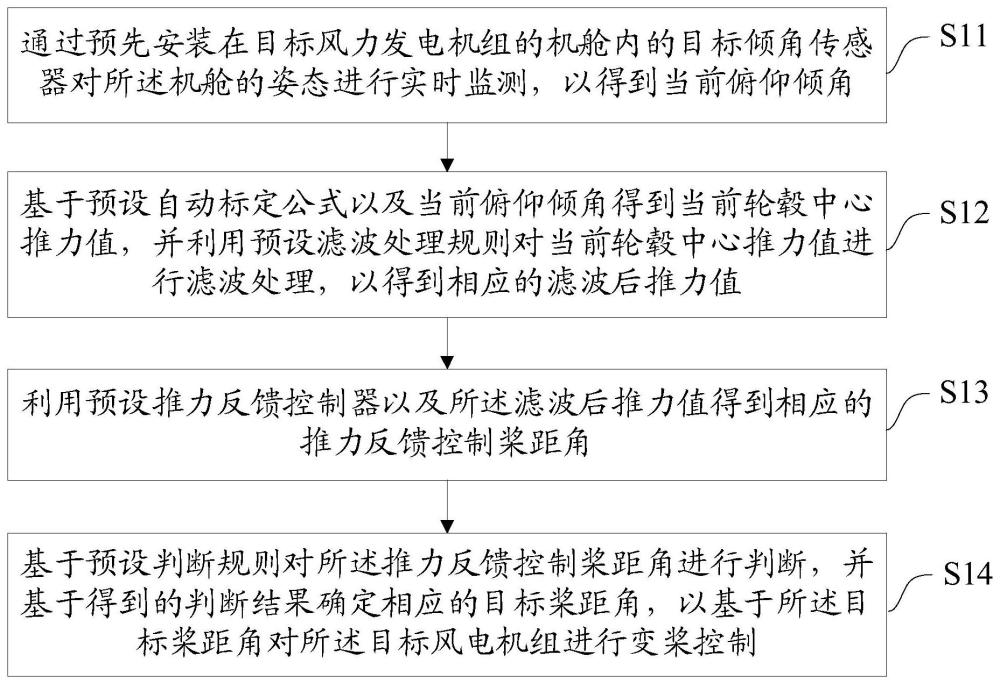
3、通过预先安装在目标风力发电机组的机舱内的目标倾角传感器对所述机舱的姿态进行实时监测,以得到当前俯仰倾角;
4、基于预设自动标定公式以及当前俯仰倾角得到当前轮毂中心推力值,并利用预设滤波处理规则对当前轮毂中心推力值进行滤波处理,以得到相应的滤波后推力值;
5、利用预设推力反馈控制器以及所述滤波后推力值得到相应的推力反馈控制桨距角;
6、基于预设判断规则对所述推力反馈控制桨距角进行判断,并基于得到的判断结果确定相应的目标桨距角,以基于所述目标桨距角对所述目标风电机组进行变桨控制。
7、可选的,所述通过预先安装在目标风力发电机组的机舱内的目标倾角传感器对所述机舱的姿态进行实时监测,包括:
8、当预先安装在目标风力发电机组的机舱内的第一目标倾角传感器或第二目标倾角传感器均无异常时,通过所述第一目标倾角传感器或所述第二目标倾角传感器对所述机舱的横滚倾角和俯仰倾角进行实时监测。
9、可选的,所述发电机组控制方法,还包括:
10、在通过所述第一目标倾角传感器对所述机舱的横滚倾角和俯仰倾角进行实时监测时,若所述第一目标倾角传感器发生故障,则自动切换所述第二目标倾角传感器对所述机舱的横滚倾角和俯仰倾角进行实时监测。
11、可选的,所述利用预设推力反馈控制器以及所述滤波后推力值得到相应的推力反馈控制桨距角,包括:
12、获取预设期望推力值;
13、通过将所述滤波后推力值以及所述预设期望推力值之间的差值输入至预设推力反馈控制器,得到所述预设推力反馈控制器输出的相应的推力反馈控制桨距角。
14、可选的,所述基于预设判断规则对所述推力反馈控制桨距角进行判断,包括:
15、获取预设转速反馈变桨控制器输出的基础桨距角;
16、通过对比所述推力反馈控制桨距角与所述基础桨距角,判断所述推力反馈控制桨距角与所述基础桨距角的大小关系,以得到相应的判断结果。
17、可选的,所述基于得到的判断结果确定相应的目标桨距角,包括:
18、若所述判断结果表明所述推力反馈控制桨距角大于所述基础桨距角,则确定所述推力反馈控制桨距角为相应的目标桨距角;
19、若所述判断结果表明所述推力反馈控制桨距角小于所述基础桨距角,则确定所述基础桨距角为相应的目标桨距角。
20、可选的,所述利用预设滤波处理规则对当前轮毂中心推力值进行滤波处理,包括:
21、利用预设二阶低通滤波器以及预设陷波滤波器对当前轮毂中心推力值进行滤波处理。
22、第二方面,本申请提供了一种发电机组控制装置,应用于预设发电机组控制系统,包括:
23、姿态监控模块,用于通过预先安装在目标风力发电机组的机舱内的目标倾角传感器对所述机舱的姿态进行实时监测,以得到当前俯仰倾角;
24、推力值获取模块,用于基于预设自动标定公式以及当前俯仰倾角得到当前轮毂中心推力值,并利用预设滤波处理规则对当前轮毂中心推力值进行滤波处理,以得到相应的滤波后推力值;
25、桨距角获取模块,用于利用预设推力反馈控制器以及所述滤波后推力值得到相应的推力反馈控制桨距角;
26、机组控制模块,用于基于预设判断规则对所述推力反馈控制桨距角进行判断,并基于得到的判断结果确定相应的目标桨距角,以基于所述目标桨距角对所述目标风电机组进行变桨控制。
27、第三方面,本申请提供了一种电子设备,包括:
28、存储器,用于保存计算机程序;
29、处理器,用于执行所述计算机程序,以实现前述的发电机组控制方法的步骤。
30、第四方面,本申请提供了一种计算机可读存储介质,用于保存计算机程序,所述计算机程序被处理器执行时实现前述的发电机组控制方法的步骤。
31、可见,本申请中,通过预先安装在目标风力发电机组的机舱内的目标倾角传感器对所述机舱的姿态进行实时监测,以得到当前俯仰倾角;基于预设自动标定公式以及当前俯仰倾角得到当前轮毂中心推力值,并利用预设滤波处理规则对当前轮毂中心推力值进行滤波处理,以得到相应的滤波后推力值;利用预设推力反馈控制器以及所述滤波后推力值得到相应的推力反馈控制桨距角;基于预设判断规则对所述推力反馈控制桨距角进行判断,并基于得到的判断结果确定相应的目标桨距角,以基于所述目标桨距角对所述目标风电机组进行变桨控制。也就是说,本申请通过对目标风力发电机组的机舱姿态进行实时监测,利用监测到的当前俯仰倾角进行自动标定得到当前轮毂中心推力值,然后基于当前轮毂中心推力值进行发电机组控制。这样一来,解决了目前在基于转速反馈进行变桨控制的过程中由于难以及时、有效控制大湍流和阵风工况下机组所受轮毂中心推力及其相关载荷,造成叶片、塔筒等因承受过大运行载荷进而导致的机组设计制造成本增加的问题,有效降低了成本,并提高发电机组控制的便利性、准确性以及及时性。
技术特征:
1.一种发电机组控制方法,其特征在于,应用于预设发电机组控制系统,包括:
2.根据权利要求1所述的发电机组控制方法,其特征在于,所述通过预先安装在目标风力发电机组的机舱内的目标倾角传感器对所述机舱的姿态进行实时监测,包括:
3.根据权利要求2所述的发电机组控制方法,其特征在于,还包括:
4.根据权利要求1所述的发电机组控制方法,其特征在于,所述利用预设推力反馈控制器以及所述滤波后推力值得到相应的推力反馈控制桨距角,包括:
5.根据权利要求1所述的发电机组控制方法,其特征在于,所述基于预设判断规则对所述推力反馈控制桨距角进行判断,包括:
6.根据权利要求5所述的发电机组控制方法,其特征在于,所述基于得到的判断结果确定相应的目标桨距角,包括:
7.根据权利要求1至6任一项所述的发电机组控制方法,其特征在于,所述利用预设滤波处理规则对当前轮毂中心推力值进行滤波处理,包括:
8.一种发电机组控制装置,其特征在于,应用于预设发电机组控制系统,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,用于保存计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的发电机组控制方法。
技术总结
本申请公开了一种发电机组控制方法、装置、设备及存储介质,涉及风力发电技术领域,包括:通过预先安装在目标风力发电机组的机舱内的目标倾角传感器对机舱的姿态进行实时监测,得到当前俯仰倾角;基于预设自动标定公式以及当前俯仰倾角得到当前轮毂中心推力值,并利用预设滤波处理规则对当前轮毂中心推力值进行滤波处理,以得到滤波后推力值;利用预设推力反馈控制器以及滤波后推力值得到相应的推力反馈控制桨距角;基于预设判断规则对推力反馈控制桨距角进行判断,并基于得到的判断结果确定相应的目标桨距角,以基于所述目标桨距角对所述目标风电机组进行变桨控制。有效实现了降低推力相关疲劳和极限载荷的目的,提高了机组安全性并降低了成本。
技术研发人员:张贝贝,陈前,聂方正,王瑞良,葛君
受保护的技术使用者:运达能源科技集团股份有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!