一种风电机组叶片故障监测方法及系统与流程
本发明涉及风电机组,尤其是涉及一种风电机组叶片故障监测方法及系统。
背景技术:
1、由于风电机组叶片为木料、玻璃钢等复合材料,通过模具灌注,最后通过合模组成,因此随着风电机组叶片长度、质量的增加,且长期在恶劣环境下保持高速运动,风电机组叶片开裂时有发生。而为了能及时发现风电机组叶片出现的故障,避免故障影响风电机组的运行,需要对风电机组的叶片进行监测。
2、现有的风电机组叶片监测方案主要有光学监测、无人机监测和载荷监测。但是,光学监测方案存在无法精准识别叶尖故障及叶片内部裂纹故障的问题;无人机监测则存在只适用于巡检功能,无法实现长期在线监测的问题;载荷监测则由于需要安装较多应变、加速度传感器,且需要对叶片气动模型、静止载荷进行标定,存在成本较高,且数据处理较繁琐的问题。因此,现在亟需一种全面且更加简便的长期在线监测风电机组叶片的方案。
技术实现思路
1、为克服相关技术中存在的问题,本发明提供一种风电机组叶片故障监测方法及系统,用以解决现有技术中风电机组叶片监测方案要么监测范围有限、无法长期在线监测,要么布置成本高、数据处理繁琐的问题。
2、根据本发明的第一方面,提供一种风电机组叶片故障监测方法,所述方法包括:
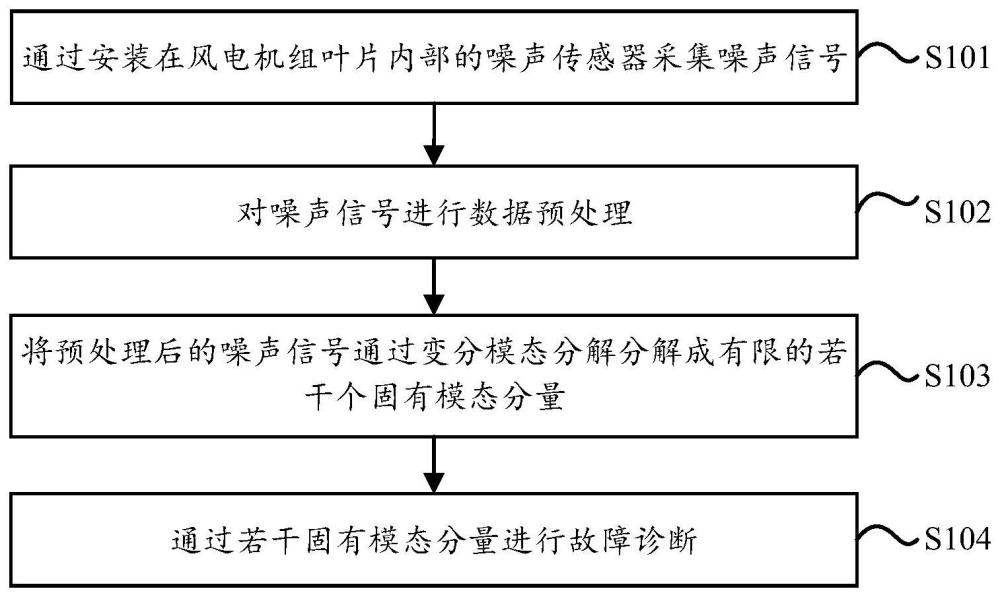
3、通过安装在所述风电机组叶片内部的噪声传感器采集噪声信号;
4、对所述噪声信号进行数据预处理;
5、将预处理后的所述噪声信号通过变分模态分解分解成有限的若干个固有模态函数分量;
6、通过若干所述固有模态函数分量进行故障诊断。
7、优选地,所述噪声传感器为光纤mems噪声传感器。
8、优选地,所述噪声传感器的安装方式为:
9、在所述风电机组叶片内部,从叶根开始,每隔指定距离安装1个所述噪声传感器;且所述风电机组每只叶片上所安装的噪声传感器数量及相对位置保持一致。
10、优选地,对所述噪声信号进行数据预处理包括对所述噪声信号进行数据分帧;对所述噪声信号进行数据分帧,包括:
11、以风轮为圆心,将所述风电机组叶片在风轮旋转平面上的运动轨迹等角度划分为若干个角度范围,并对每一个角度范围上采集的噪声信号标记对应的角度标签;且在所述风电机组每只叶片上对所述噪声信号所标记的角度标签不同;
12、根据所述角度标签对所述噪声信号进行数据分帧。
13、优选地,对所述噪声信号进行数据预处理包括使用卡尔曼滤波对所述噪声信号进行数据滤波;使用卡尔曼滤波对所述噪声信号进行数据滤波,包括:
14、所述风电机组采集所述噪声信号的状态方程为:
15、xt=axt-1+but-1+ωt-1
16、p(ω)~n(0,q)
17、其中,xt-1为t-1时刻的状态矢量,ut-1为t-1时刻的输入矢量,ωt-1为过程噪声,a为所述噪声信号的状态转移系数矩阵,b为可选的控制输入矩阵,q为所述过程噪声的协方差矩阵,且所述过程噪声满足高斯分布;
18、所述噪声信号的测量方程为:
19、zt=hxt+vt
20、p(v)~n(0,r)
21、其中,zt为t时刻的测量矢量,vt为对应的测量误差,h为测量系数矩阵,r为所述测量误差的协方差矩阵,且所述测量误差满足高斯分布;
22、基于卡尔曼滤波,所述噪声信号的时间更新方程为:
23、
24、
25、其中,为状态矢量的预测值,p为误差的协方差矩阵;
26、基于卡尔曼滤波,所述噪声信号的测量更新方程为:
27、
28、
29、
30、其中,k为卡尔曼滤波增益。
31、优选地,所述通过若干所述固有模态函数分量进行故障诊断,包括:
32、将若干所述固有模态函数分量输入指定的长短期记忆网络,获得故障预测结果;其中,所述长短期记忆网络预先通过由若干故障信号和健康信号组成的数据集训练获得;
33、若所述故障预测结果指示为出现故障,则发起故障警告,以提示进行故障处理。
34、优选地,所述长短期记忆网络包括输入层、隐含层和输出层;其中,所述隐含层包括记忆单元和控制单元,所述控制单元包括输入门、遗忘门和输出门;
35、所述长短期记忆网络在向前传播过程中,依次进行以下计算:
36、计算更新所述遗忘门的值,其公式为:
37、f(t)=σ(wfh(t-1)+wix(t)+bf)
38、其中,σ为sigmoid激活函数,wf为遗忘门权值,bf为遗忘门阈值;
39、计算更新所述输入门的值,其公式为:
40、i(t)=σ(wih(t-1)+wix(t)+bi)
41、c,(t)=tanh(wch(t-1)+wcx(t)+bc)
42、其中,wi、wc、bi和bc分别为所述输入门的sigmoid激活函数和tanh激活函数所对应的权值和阈值;
43、计算更新所述记忆单元的值,其公式为:
44、
45、其中,为点乘;
46、计算更新所述输出门的值,其公式为:
47、o(t)=σ(woh(t-1)+wox(t)+bo)
48、
49、其中,wo为输出门权值,bo为输出门阈值,h(t)为所述隐含层的输出向量;
50、更新当前时刻的预测输出,其公式为:
51、
52、其中,v和c分别为所述隐含层到所述输出层的连接的权值和阈值。
53、优选地,在将预处理后的所述噪声信号通过变分模态分解分解成有限的若干个固有模态函数分量的过程中,所述变分模态分解的公式为:
54、
55、
56、其中,f为输入的噪声信号,uk为分解后获得的k个固有模态函数分量,k为所述固有模态函数分量的数量,ωk为所述固有模态函数分量的中心频率,δ(t)为脉冲函数;
57、将拉格朗日乘法算子引入所述变分模态分解公式进行求解,其表达式为:
58、
59、其中,λ为拉格朗日乘法算子,α为惩罚因子,f(t)为待分解的噪声信号,uk(t)为第k个固有模态函数分量;
60、引入所述拉格朗日乘法算子后,所述变分模态分解公式的解算方法为:
61、初始化所述固有模态函数分量所述固有模态函数分量的中心频率和所述拉格朗日乘法算子
62、初始化迭代次数n=0,以n=n+1进行若干次迭代计算,在每次迭代计算中,通过以下公式对所述固有模态函数分量所述固有模态函数分量的中心频率和所述拉格朗日乘法算子进行更新:
63、
64、
65、
66、其中,τ为噪声容限;
67、根据预设的精度值ε,当满足以下条件时停止迭代计算:
68、
69、输出分解获得的若干个固有模态函数分量。
70、优选地,对所述噪声信号进行数据预处理包括对所述噪声信号进行数据筛选;对所述噪声信号进行数据筛选,包括以下至少一个:
71、根据风机并网信号判断所述风电机组的运行状态,过滤非并网状态下的风电机组所采集的噪声信号;
72、根据风机偏航信号判断所述风电机组是否处于偏航状态,过滤处于偏航状态下的风电机组所采集的噪声信号。
73、根据本发明的第二方面,提供一种风电机组叶片故障监测系统,所述系统包括安装在所述风电机组叶片内部的若干噪声传感器、信号调制调解器、信号接收站和监控中心;
74、所述噪声传感器用于采集所述风电机组叶片所产生的噪声信号;
75、所述信号调制调解器用于接收所述噪声传感器所采集的所述噪声信号,以及通过无线连接,将所述噪声信号传输至所述信号接收站;
76、所述信号接收站用于通过风电机组环网,将所述噪声信号传输至所述监控中心;
77、所述监控中心用于存储所述噪声信号,以及通过如本发明任一实施例所述的风电机组叶片故障检测方法对所述风电机组叶片进行故障监测。
78、本发明公开了一种风电机组叶片故障监测方法及系统,通过将噪声传感器安装在叶片内部,监测叶片内各个部位产生的噪声信号来识别叶片的故障情况,监测范围全面;而且由于噪声传感器安装在叶片内部,不受外部环境的影响,可以实现全天候的在线监测;而且本发明仅通过噪声传感器采集的噪声信号来进行故障诊断,与现有的载荷监测方案相比,产生的数据量更少,数据类型单一,处理更方便,算法开发难度和应用成本更低。
79、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!