一种考虑降载的偏航控制方法、系统、设备及存储介质与流程
本发明涉及风电机组控制,具体为一种考虑降载的偏航控制方法、系统、设备及存储介质。
背景技术:
1、风电机组偏航控制系统是影响风电机组发电效率的关键因素,通过对偏航控制策略进行优化,可以有效提高机组的风能利用效率。风电机组的控制策略通常以有功功率与发电量等生产效益指标为直接的指导标准,而风电机组载荷特性,除极限负载以外,往往不参与控制策略的设计。偏航控制系统又称对风装置,是风力发电机组机舱的一部分。当风机捕获的风速矢量的方向发生变化时,偏航系统可以控制机舱快速平稳的对准风向,以便机组俘获更多的风能。现阶段风电机组的发展逐步进入大型化,轻量化的阶段,随之而来的是机组的零部件柔度不断增大,系统的固有频率逐渐降低。这使得空气扰动等随机扰动因素以及机组本身重力所造成的机组承受载荷的情况变得异常复杂,而长时间大幅度的振动必然会对机组的结构强度及使用寿命产生巨大的隐患。因此在对风电机组主控系统进行设计与优化的同时,如何评估复杂的气动载荷对机组的影响并实现降载成为了风电机组控制系统优化的重要目标之一。
2、风电机组偏航控制系统在实际应用过程中,普遍存在着自适应水平较差,且控制精度相对较低的情况。现阶段偏航控制优化往往以提高发电功率为单一目标,极少考虑因此而带来的载荷增加等负面效益,一味追求提效的同时忽略了载荷增加对风电机组全生命周期平稳运行的影响。偏航控制系统作为风电机组对风装置,在偏航控制过程中会对机组气动载荷产生极为复杂的影响,因此对风电机组偏航控制过程中气动载荷的评估有着重要意义。
技术实现思路
1、针对现有技术中风电机组偏航控制系统控制精度较低的问题,本发明提供一种考虑降载的偏航控制方法、系统、设备及存储介质,通过调整阈值与启动延迟时间两种控制参数,以提高发电功率与降低气动载荷为目标,提出一种偏航控制多目标优化方法。
2、本发明是通过以下技术方案来实现:
3、一种考虑降载的偏航控制方法,包括以下步骤:
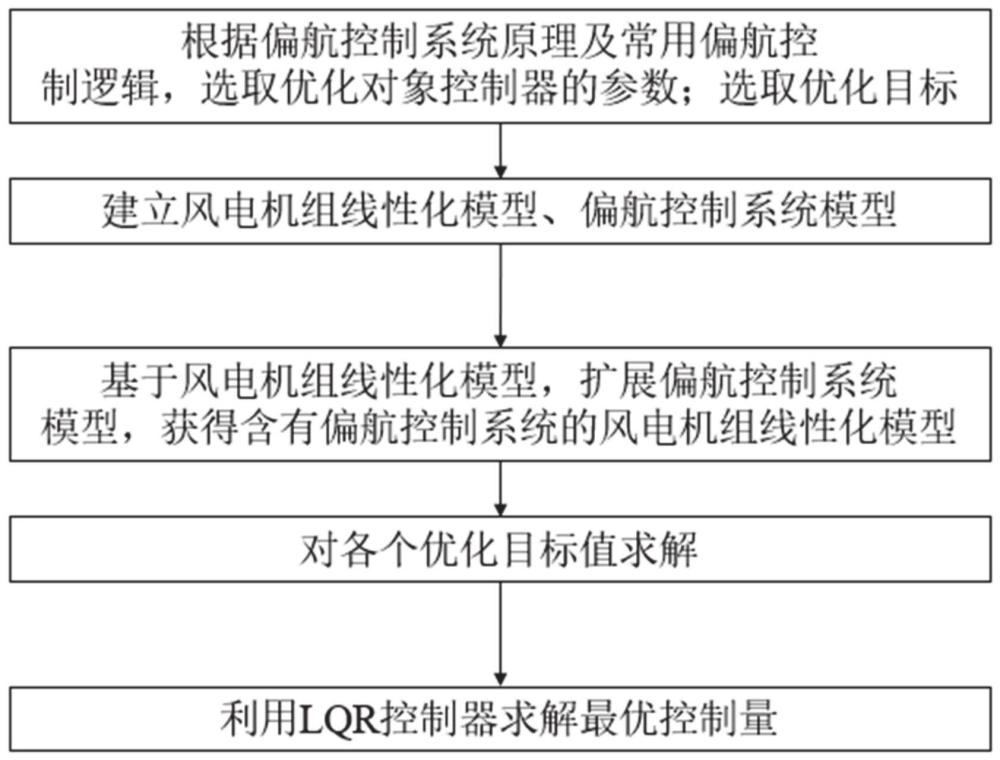
4、步骤1,根据偏航控制系统原理及常用偏航控制逻辑,选取优化对象控制器的参数;参数包括阈值与启动延迟时间;
5、选取优化目标,包括等效发电量、叶根弯矩以及塔顶推力的等效疲劳载荷;
6、步骤2,根据机组实际技术参数,建立风电机组线性化模型;
7、以阈值与启动延迟时间为输入,根据偏航控制策略构建阈值、延迟时间与机舱绝对位置的偏航控制模型;之后引入风向修正模型,并串联风向修正模型与偏航控制模型,获取偏航控制系统模型;
8、步骤3,基于风电机组线性化模型,采用模型辨识的方法扩展偏航控制系统模型,获得含有偏航控制系统的风电机组线性化模型;
9、步骤4,针对含有偏航控制系统的风电机组线性化模型,对各个优化目标值求解;
10、步骤5,利用lqr控制器求解最优控制量,即最优阈值和最优延迟时间。
11、优选的,步骤2中,针对风电机组线性化模型,选取风速、桨距角及额定转矩作为输入,以有功功率、叶根弯矩mxy及发电机转矩作为输出,构建风电机组线性化模型的状态空间表达式:
12、
13、其中,a为系统状态系数矩阵,b为系统控制系数矩阵,c为输出状态系数矩阵,d为输出控制系数矩阵。
14、优选的,步骤2中,以风电机组步骤cada运行数据为基础,分别以偏航误差与发电功率以及叶根弯矩、塔顶推力作为模型的输入与输出,辨识系统开环传递函数,构成新的开环传递函数矩阵g,矩阵g即为风向修正模型的表达矩阵。
15、优选的,偏航误差err=绝对入流风向-机舱绝对位置,其中,绝对入流风向与机舱绝对位置均以正北方向为0°。
16、优选的,步骤3中,含有偏航控制系统的风电机组线性化模型的建立过程为:
17、假设偏航控制系统线性化模型状态空间表达式为:
18、
19、根据状态空间表达式与传递函数矩阵的关系:
20、g0(s)·g(s)=c0(si-a0)-1b0+d0
21、将偏航控制系统传递函数矩阵模型变化为状态空间表达式,并将偏航控制线性化模型扩展至原始风电机组线性化模型:
22、
23、扩展后,得到新的含有偏航控制系统的风电机组线性化模型:
24、
25、优选的,步骤4中,求解时,通过积分计算求解量化等效发电量及雨流计数求解等效疲劳载荷。
26、优选的,步骤5中,求解最优控制量的具体过程如下:构造全状态反馈控制系统,设计状态反馈控制器;设置阈值与启动延迟时间区间分别为[5°,20°],[10s,210s],令输入时,阈值区间分度为0.1°,延迟时间分度为1s;
27、在完整的偏航控制系统线性化模型中,取机组cada数据库中偏航动作一小时内约4~5次的某段数据作为模型的风速与风向输入,状态反馈控制器u中的变量为阈值与延迟时间,求解输出的有功功率与叶根弯矩最优阈值与延迟时间输入值;
28、之后引入代价方程j,计算偏航控制阈值与延迟时间的最优参数。
29、一种考虑降载的偏航控制系统,包括选取模块、模型构建模块、扩展模块和计算处理模块,选取模块用于选取优化对象控制器的参数和优化目标;模型构建模块用于建立风电机组线性化模型、偏航控制模型、风向修正模型和偏航控制系统模型;扩展模块用于采用模型辨识的方法扩展偏航控制系统模型,获得含有偏航控制系统的风电机组线性化模型;计算处理模块用于量化输出值和计算最优阈值和最优延迟时间。
30、一种终端设备,包括存储器、处理器以及存储在所述存储器中并在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现所述方法的步骤。
31、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如所述方法的步骤。
32、与现有技术相比,本发明具有以下有益效果:
33、本发明一种考虑降载的偏航控制方法以风电机组历史运行数据为基础,通过对风电机组线性化模型的优化控制,寻找能够兼顾功率提升与气动载荷降低的偏航控制器参数,实现以升功降载为目标的风电机组偏航控制优化。通过调整阈值与启动延迟时间两种控制参数,以实现提高发电功率与降低气动载荷的目标。本发明提出的多目标优化问题以提高等效发电量,降低两种等效疲劳载荷作为最终优化目标。
34、本发明中风电机组线性化模型的扩展,通常针对风电机组的线性化模型不包括偏航控制,本发明提出通过模型辨识的方法扩展机组线性化模型输入,将风向与偏航控制器参数引入机组线性化模型中。传统的风电机组线性化模型通常表现为状态空间表达式,反应风电机组的功率特性等,而模型中通常不包含控制系统。本发明提出的模型扩展方法在原有线性化模型的基础上,通过辨识与扩展,将偏航控制系统同样表征为状态空间表达式,实现了线性化模型的扩展,使得风电机组线性化模型具有偏航控制系统的输入与输出。
35、本发明利用lqr方法的偏航控制优化求解,以载荷与功率为优化目标的偏航控制多目标优化方法,其中对优化问题的求解通过对偏航控制的线性化建模,使得lqr方法成为可行之法。在使用lqr方法的过程中,由于寻优参数为偏航控制的阈值与延迟时间,故将原有模型中的风速与风向输入设为常量,即选取一段具有代表性的机组步骤cada运行数据为输入(代表性的含义为在原本的偏航控制策略之下,该段风况输入后机组在一定时间内能够执行多次偏航,如一小时内执行4~5次),使得lqr优化计算的结果为阈值与延迟时间输入,实现偏航控制参数优化。
- 还没有人留言评论。精彩留言会获得点赞!