一种基于茶蓬面接触式仿形采摘装置及其割台控制方法
本发明涉及茶叶采摘,特别是涉及一种基于茶蓬面接触式仿形采摘装置及其割台控制方法。
背景技术:
1、我国茶叶种植多处丘陵山地、标准化程度低,茶叶采摘机械化程度很低。目前国内得到较多推广使用的是小型手持式、手抬式茶叶采摘设备。随着劳动力的日渐短缺,现有小型设备已不能满足实际生产需求,乘坐式(自走式)采摘装备能有效降低人工劳动强度,但现有相关装备在地形复杂和修剪不规范的非标准化茶园中适用性低,因作业过程中刀具位置不能针对茶树蓬面形态变化进行自动调节,不能满足侧沟有高度差、蓬面不规则的茶园作业要求,采摘效果不能得到保证所以未得到大范围推广使用。现有的机具采收过程中割刀位置不能适时随着蓬面形态变化自动调节致使采摘过程中漏采率和芽叶破损率过高。现基于机器视觉、超声波、激光雷达等蓬面非接触式仿形手段受环境影响大,仿形效果得不到保障。机器视觉、超声波和激光雷达在实际应用中可能会受到以下环境因素的干扰:
2、机器视觉系统对光照条件非常敏感。强烈的光照、阴影、反射和漫反射光都可能影响图像采集和处理的质量,导致识别和测量错误。恶劣的天气条件会降低机器视觉系统的性能。雨滴、雪花和雾霾会散射光线并造成图像模糊,从而影响物体的检测、跟踪和识别。当物体被其他物体或障碍物遮挡时,机器视觉系统可能无法完整地获取物体的信息。遮挡物可能导致物体的部分或全部被隐藏,从而影响检测和测量的准确性。环境中的噪声包括声音、电磁干扰和传感器本身的噪声。这些噪声可能干扰超声波传感器和激光雷达的测量,导致测量误差或不准确性。在某些情况下,超声波和激光雷达信号可能会受到多路径干扰。多路径干扰是指信号在传播过程中经过反射、折射或散射,导致信号到达传感器的时间和方向发生变化。这可能导致距离测量的错误和误判。温度和湿度的变化可能会影响超声波和激光雷达传感器的性能。例如,温度变化可能导致传感器的测量精度发生偏移,湿度变化可能影响光线的传播和散射特性。
3、因此,开发一种基于茶蓬面接触式仿形采摘装置及其割台控制方法提高丘陵山地非规范化种植茶园的采收作业质量,是本领域技术人员亟需解决的问题。
技术实现思路
1、本发明的目的是提供一种基于茶蓬面接触式仿形采摘装置及其割台控制方法,以解决上述现有技术存在的问题,通过单片机对角度传感器采集的数字信号进行计算,可以获取当前蓬面三个仿形机构摆动杆的角度变化情况。通过检测仿形机构摆动杆角度变化信息,可以获取仿形板的空间尺度变化信息。将三个角度传感器角度信息变化值与仿形机构摆动杆本身尺寸参数代入几何公式中,计算当前蓬面的斜率变化情况。接着,将电机的位置参数与挂接平台及割刀尺寸参数进行联合反求,以获取割刀的位置信息,并计算此时空间中挂接割刀的斜率。通过比较两者之间的斜率差值,对伺服电机的输出进行调控,以实现蓬面形态自适应调控割刀位置,从而改善茶叶采收效果。
2、为实现上述目的,本发明提供了如下方案:
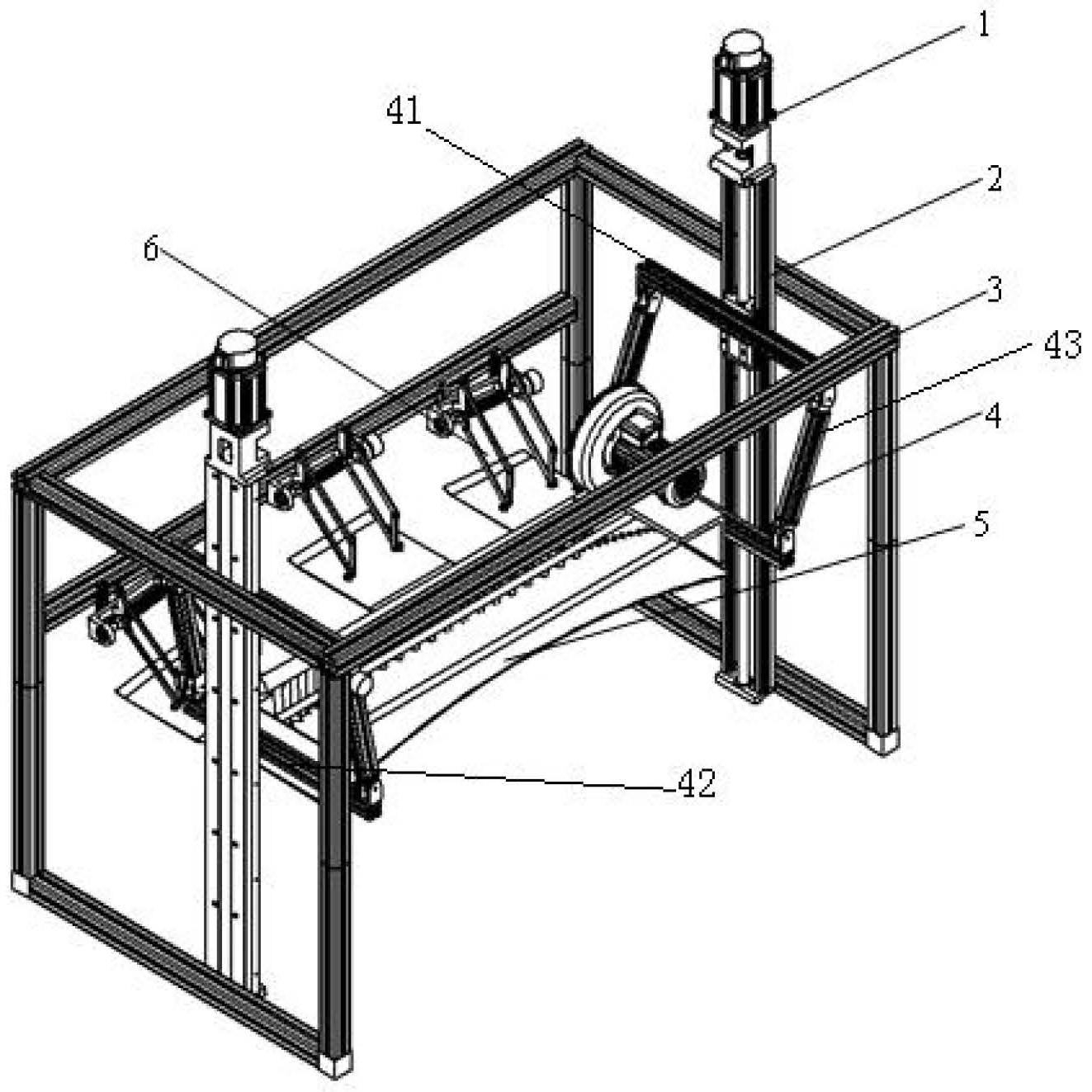
3、本发明提供一种基于茶蓬面接触式仿形采摘装置,包括伺服电机、丝杠滑台直线升降模组、机架、割台挂接机构、割台和蓬面仿形机构;
4、所述丝杠滑台直线升降模组安装在所述机架的两侧;
5、所述割台挂接机构包括上横梁、下横梁和连接于所述上横梁和所述下横梁两侧的摆动臂,其中,所述上横梁与所述丝杠滑台直线升降模组连接,所述下横梁与所述割台连接,所述摆动臂与所述上横梁和所述下横梁铰接,其中一侧的所述摆动臂的铰接处设置有角度传感器一,所述角度传感器一用于获取摆动臂位置信息,用于求解割台割刀位置;
6、所述蓬面仿形机构设置于所述机架的后侧横梁上,所述蓬面仿形机构包括扭簧、仿形机构固定机架、挂接轴、摆动杆一、角度传感器二、摆动杆二、摆动杆三、支撑杆和蓬面接触仿形板;所述仿形机构固定机架的后侧固定于所述机架上,所述仿形机构固定机架的前侧安装所述挂接轴,所述角度传感器二安装于所述挂接轴的一端,所述角度传感器二用于获取挂接轴角度变化信息,所述扭簧套设于所述挂接轴上,所述扭簧的两侧分别设置有一由所述摆动杆一、所述摆动杆二、所述摆动杆三和支撑杆构成的平行丝杆机构,两个所述平行丝杆机构的所述摆动杆一的首端连接在所述扭簧两侧的所述挂接轴上,所述摆动杆一的尾端铰接所述摆动二的底端,所述摆动二的顶端铰接位于所述摆动杆一顶部的所述摆动杆三的尾端,所述摆动三的首端铰接所述支撑杆的顶部,所述支撑杆的底部固定于所述仿形机构固定机架上;所述扭簧的一端连接其中一个所述平行丝杆机构的所述摆动杆一,所述扭簧的另一端连接另一个所述平行丝杆机构的支撑杆;两个所述平行丝杆机构的所述摆动杆一和所述摆动二的铰接处铰接连接蓬面接触仿形板。
7、优选地,所述丝杠滑台直线升降模组包括丝杠和滑台,所述伺服电机安装于所述丝杠滑台直线升降模组的顶部,并通过联轴器与所述丝杠连接,用于驱动所述丝杠转动实现滑台升降。
8、优选地,所述机架两侧的丝杠滑台直线升降模组对称设置。
9、优选地,所述上横梁与所述丝杠滑台直线升降模组的滑台连接。
10、优选地,所述仿形机构固定机架两端的凹槽内装有滚动轴承,所述挂接轴通过所述滚动轴承与所述仿形机构固定机架连接。
11、优选地,所述蓬面仿形机构设置有三个,三个所述蓬面仿形机构在所述机架的后侧横梁上均布。
12、基于上述基于茶蓬面接触式仿形采摘装置,本发明还提供了一种基于茶蓬面接触式仿形采摘装置的割台控制方法,通过比较判断割台割刀实际斜率与三块蓬面接触仿形板获取的蓬面斜率的角度变化关系,从而进行割台调控调节割刀的位置,在实际工作时,三块仿形板与蓬面初次接触时摆动杆三个角度作为蓬面初始形态参数角度,此时调节割刀至合适位置,此时两者位置关系为理想切割位置预设值,将计算出的调控系统中三块仿形板获取蓬面形态斜率k1与割台割刀的斜率k2,将斜率换算成相应坐标系下的角度kθ1与kθ2,两者作差能够得割刀现处位置与蓬面合理切割位置偏差,记为e,e=kθ1-kθ2,当e在目标斜率的调节阈值内,则控制器不发出调节割台动作的指令,割台保持静止状态,当e处于调节阈值外时,若e>0则割台左右电机执行使得割台斜率增大,若e<0则割台斜率减小动作,直至e重新落在目标斜率的调节阈值内时,电机停止调控割台动作,kθmax为预设斜率偏差角度的最大阈值,kθmin为预设斜率偏差角度的最小阈值,当两斜率正负偏差在|e|≤2°时割刀位置不进行调控;当斜率正负偏差|e|>30°时系统提示异常系统停止运作,人为进行检查。
13、本发明相对于现有技术取得了以下有益技术效果:
14、1.提高采收作业质量:通过监测茶蓬面形态变化,装置能够自适应调节割刀位置,从而改善茶叶采摘效果,提高采收作业的质量;接触式仿形相比视觉、激光雷达以及超声波等一方面不受环境影响,提高仿形的精度;另一方面接触式仿形应用成本更低,易于推广。
15、2.自适应调控割刀位置:基于茶蓬面形态变化数据和几何公式计算,装置能够实时计算蓬面的斜率变化情况,并联合反求割刀的位置信息。通过比较实际割刀位置和期望位置的斜率差值,对伺服电机进行调控,实现割刀位置的自适应调节。
16、3.适应茶树蓬面变化:装置利用角度传感器采集茶蓬面的形态变化信息,并将其与仿形机构尺寸参数结合,计算蓬面的空间尺度变化情况。这样可以更好地适应茶树蓬面的变化,提高采摘的适应性和准确性。
17、4.提高采摘效率:通过自动调节割刀位置,装置可以更准确地切割茶叶,减少误差和损失,提高采摘效率。
18、5.适用于丘陵山地非规范化种植茶园:本发明的装置设计适用于丘陵山地非规范化种植茶园的采摘作业,可以克服传统采摘方法的不足,提高茶叶采收的质量和效率。
- 还没有人留言评论。精彩留言会获得点赞!