微机械结构元件、尤其是具有振动质量、衬底和罩的惯性传感器的制作方法
1.本发明基于一种微机械结构元件、尤其是惯性传感器,其具有振动质量、衬底和罩,其中,振动质量沿垂直于参考电极的主延伸平面的方向能够偏移,并且其中,振动质量沿朝衬底的偏移方向具有柔性止挡,其中,振动质量的柔性止挡借助弹簧元件与振动质量的主体连接,并且弹簧元件在一弹性层中实现。
背景技术:
2.用于测量线性加速度或旋转加速度的现代传感器通常具有由半导体材料(典型地是硅或含硅的材料)制成的微机械结构(也称为传感器芯)以及分析评估电子器件。这种传感器使用在机动车领域,例如esp系统中或在移动设备,例如移动电话的领域中。
3.用于测量加速度和转速的微机械结构元件在批量生产中制造,用于汽车和消费品领域中的不同应用。对于具有垂直于晶片平面(z方向)的探测方向的电容式加速度传感器而言经常使用跷跷板结构。该跷跷板结构的传感器原理基于弹簧-质量系统,在弹簧-质量系统中,在最简单情况下,具有固定在衬底上的两个对应电极的可运动的振动质量构成两个板式电容器。振动质量通过至少一个、出于对称性原因通常两个扭簧与衬底连接。如果质量结构在扭簧的两侧上大小不同,则在z加速度的作用下质量结构相对于作为旋转轴线的扭簧旋转。由此在具有较大质量的一侧上电极的间距更小,而在另一侧上电极的间距更大。电容变化是对于作用的加速度的度量。这些加速度传感器在许多文献中被描述,例如在文献ep 0 244 581和ep 0 773 443 b1中。
4.在微机械传感器的研发中的重要趋势(除了降低成本和提高性能之外)是提高机械鲁棒性或抗过载性。由于革新的应用而产生新的安装位置和从而可能也产生具有对于传感器提高的鲁棒性要求的新型负载曲线。作为示例在此提及惯性传感器在平板电脑的输入笔中的装配。虽然平板电脑或智能电话仅偶尔经受猛烈的冲击,但必须考虑的是,这在输入笔的情况下是非常频繁的情况。
5.在经常重复的冲击负载情况下,可能的错误指示是粘住,在此一旦在止挡中的粘附力大于弹簧-质量系统的复位力,可运动的传感器质量保持悬挂在机械的固定止挡上。为了减小粘附力,经常使用所谓的防粘涂层(asc),该防粘涂层在释放传感器之后布置在其表面上。然而,如果传感器(或者振动质量或其中一部分)经常碰撞到固定止挡上,则可能导致asc的损坏,使得传感器最终显示出提高的粘附倾向(klebeneigung)。基于非常频繁的机械冲击的另一可能的错误指示是颗粒形成,其由在止挡表面上的非常细的磨损引起。这种颗粒尤其可能累积并导致限制运动自由性、电气短路或也导致粘住。
6.在振动质量碰撞到传感器的刚性结构上的情况下会出现高的力峰值,该力峰值必须被微机械结构处理。这尤其可能导致结构的机械损坏。
7.为了降低粘住风险,通过一般已知的方式,例如对于z加速度传感器通常使用粒结止挡。在这种情况下,粒结布置在可运动的传感器结构的下侧上。由于减小的止挡面,粘附
力相对较小并且因此在偶尔接触时的粘住风险很小。然而,硬的固定碰撞在经常过载的情况下倾向于上述错误机制(粘住、颗粒形成)。因此在过去已经提出了不同的弹性止挡,其一方面减轻在止挡上的碰撞、即减少止挡表面的机械损坏,另一方面提供在强烈过载情况下的提高的复位力,因为除传感器的功能弹簧的复位力外,止挡弹簧也有助于复位力。作为弹性止挡的现有技术提及如下文献。文献de 10 2008 043 753 a1示出具有弹性止挡的传感器,其在如振动质量那样的功能层中实现。文献de 10 2012 207 939 a1要求保护一种弹性止挡,其由在更厚的功能层之下或之上的第二薄的功能层形成。在这种情况下,如果薄的功能层布置在厚的功能层之下,则可以朝底部电极的方向实现止挡。如果薄的功能层布置在厚的功能层之上,则相比之下,可以朝传感器罩的方向实现止挡。
8.不利的是,为了实现两侧有效的止挡,各自独立的薄的功能层必须设置在更厚的功能层(其承载振动质量的主体)之下以及之上,这要求提高的成本以及此外也要求进一步的空间需求。在使用止挡弹簧(其由更厚的功能层实现)的情况下也实现弹性的止挡是不利的,因为止挡弹簧在微电子机械系统(mems)的厚的功能层(其典型地具有大于10μm、典型地15μm至30μm的厚度)中由于高的刚性而必须具有相应大的长度,这又消耗在传感器芯中宝贵的空间。
技术实现要素:
9.因此,本发明具有以下任务:提供改善的微机械结构元件、尤其是惯性传感器,其中柔性止挡具有紧凑的结构形式,使得可以将传感器芯的大小保持得小,并且仍然可以实现两侧有效的柔性止挡。
10.该任务通过根据独立权利要求的微机械结构元件、尤其惯性传感器来解决。本发明另外的有利构型在从属权利要求中给出。
11.根据本发明的第一方面,微机械惯性传感器或者微机械结构元件包括振动质量、衬底和罩。惯性传感器或结构元件与衬底连接地具有在第一电极层中的参考电极并且与罩连接地具有在第二电极层中的另一参考电极。振动质量沿垂直于参考电极(或衬底或另一参考电极)的主延伸平面的方向在两侧(即根据垂直于主延伸平面的方向的两个取向)是可偏移的。根据本发明,振动质量沿朝向第一电极层的偏移方向具有柔性止挡,其中,振动质量的柔性止挡借助弹簧元件与振动质量的主体连接,并且其中,弹簧元件在弹性层中实现,该弹性层布置在一方面振动质量的主体的层与另一方面第一电极层之间。此外,振动质量根据本发明沿朝向第二电极层的偏移方向具有另一柔性止挡,其中,振动质量的另一柔性止挡借助布置在振动质量的主体的层中的止挡元件与弹簧元件连接。
12.由此,根据本发明有利地可以是,相同的弹簧元件可用于实现振动质量朝向衬底以及朝向罩的柔性止挡。此外,由此有利地可以是,基于弹簧元件在较薄的功能层(其由此也能更简单地或者说以更小的尺寸实现弹性的弹簧元件)中的实现,可以优化地在宽的范围内调整弹簧元件的弹簧特性,而这样的弹簧元件的尺寸不会变得太大,即柔性止挡通过弹性层的制造不会受较厚的mems功能层(其构成振动质量的主体)的较大的刚性限制。这具有如下优点:柔性止挡和另一柔性止挡以及弹簧元件可以紧凑地构造。这又节省在传感器芯中的宝贵空间并且总体上导致结构元件的更紧凑结构。
13.根据本发明的一个优选实施方式,振动质量的主体的层和弹性层构造为功能层,
其中,振动质量主体的功能层的层厚度大于弹簧元件的弹性层的层厚度。利用功能层具有如下优点:柔性止挡和弹簧元件可以通过振动质量的层状结构简单地集成,因为可以彼此无关地构造各个功能层。尤其,柔性止挡集成到振动质量的不同构造形式中以简单的方式能够使以特别成本低的方式存在的传感器组件扩展到用于防止“粘附”的柔性止挡。
14.此外优选地,弹簧元件具有臂的形状,该臂在一端与振动质量连接,而在其另一端沿朝第一电极层的方向具有柔性止挡以及沿朝第二电极层的方向具有止挡元件和另一柔性止挡。该形状的优点在于,其具有简单的紧凑的几何结构,该几何结构能够利用结构化的传统途径成本低地制造且具有小的空间需求。此外,止挡的柔性臂可以在功能层内沿不同方向定向。优选地实现具有可运动端部的柔性臂向内的定向(例如朝可偏移的振动质量的扭转轴线的方向)或沿相反方向向外的定向。不同定向的可能性具有如下优点:柔性止挡可以非常好地匹配于常规结构元件的几何结构。
15.根据一个优选改进方案设置,柔性止挡实现或具有突出部,该突出部也称为粒结,其中,突出部设置为基本上沿偏移方向地在弹性层上突出。该实施方案能够实现:将接触面在止挡状态下保持得小。这减少了振动质量的“保持粘附”的风险。此外有利的是,通过施加突出部可以选择具有良好防粘附特性的特别的材料,由此进一步减少“保持粘附”的危险。
16.此外,根据一个优选改进方案设置,在第一电极层的平面中与柔性止挡相邻地布置有刚性止挡;并且在第二电极层的平面中与另一柔性止挡相邻地布置有另一刚性止挡;其中,在振动质量沿朝第一电极层的平面的方向至少局部地偏移时,柔性止挡和振动质量的偏移被刚性止挡限制;并且其中,在振动质量沿朝第二电极层的平面的方向至少局部地偏移时,另一柔性止挡和振动质量的偏移被另一刚性止挡限制。该实施方式的优点在于,通过存在刚性止挡或另一刚性止挡使柔性止挡或另一柔性止挡和从而振动质量总体上仅偏移至某一点。由此避免振动质量的可能的过载和功能损坏。柔性止挡的通过受限的偏移引起的复位力仍引起减少振动质量的“保持粘附”的危险。
17.根据一个优选改进方案设置,刚性止挡和另一刚性止挡具有与振动质量相同的电位。对于该实施方式特别有利的是,可运动的传感器结构或振动质量在固定止挡(或者说刚性止挡或另一刚性止挡)上的止挡是无电位的,这决定性地减少了在可运动的传感器结构与固定电极之间的电气短路和从而导致传感器失灵的危险。
18.根据一个优选改进方案设置,振动质量构造为具有第一和第二悬臂(ausleger)的跷跷板结构,所述跷跷板结构相对于衬底绕着扭转轴线是可偏转的并且通过弹簧元件与衬底连接,其中,跷跷板的两个悬臂具有不同的质量。可选地可以在跷跷板的两个悬臂中的每一个上构造至少一个柔性止挡。由此,有利地降低跷跷板和从而振动质量沿两个偏移方向“保持粘附”的概率。
附图说明
19.在附图中示出并且在下面的附图说明中进一步阐述各实施例。
20.附图示出了:
21.图1根据现有技术的具有在振动质量的主体与衬底之间的弹簧元件的微机械惯性传感器或微机械结构元件的示意性截面图;
22.图2和图3分别示出根据不同变型的根据本发明的微机械惯性传感器或结构元件
的示意性截面图;
23.图4根据本发明的微机械惯性传感器或结构元件的另一示意性截面图;
24.图5、6、7和8分别示出在根据本发明的微机械惯性传感器或结构元件的结构中针对不同平面或层的示意性俯视图;
25.图9和10用于实现振动质量的主体的层的示意图。
具体实施方式
26.在图1中示出具有振动质量30和衬底20的微机械惯性传感器或结构元件的中置,其中,惯性传感器或结构元件与衬底20连接地具有在第一电极层22中的参考电极70,其中,振动质量30沿垂直于参考电极70的主延伸平面(或者垂直于衬底20的主延伸方向)的方向6在两侧(即不但沿正的z方向,而且沿负的z方向)是可偏移的。沿朝第一电极层22的方向,振动质量30具有柔性止挡31,其中,振动质量30的柔性止挡31借助弹簧元件32与振动质量30的主体连接,其中,弹簧元件32在弹性层33中实现,该弹性层布置在一方面振动质量30的主体的层35与另一方面第一电极层22之间。该布置在如下情况下运行良好,即当传感器罩与可运动的传感器结构的上侧或与振动质量30的距离比底部电极(或参考电极70或第一电极层22)与在传感器结构(或振动质量)之下的弹性或柔性止挡31的距离更大时,即当与底部电极(第一电极层22)的止挡间隙小于罩间距时。
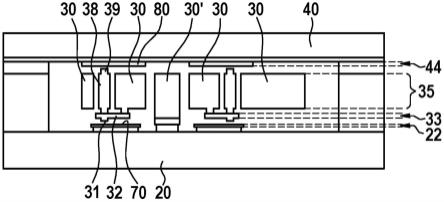
27.在图2和3中分别示出根据不同变型的根据本发明的微机械惯性传感器或结构元件的示意性截面图。这些示图示出根据按照图1的示图的传感器结构,但具有罩40(或传感器罩),该罩与振动质量30的上侧具有如在下侧上(即朝向第一电极层22)的止挡间隙类似的小间距。因此,振动质量也能够止挡在罩40上,然而,这根据本发明应被防止。按照在图2和3中的两个根据本发明的示图,具有振动质量30和衬底20的微机械惯性传感器或结构元件具有罩40,该罩以已知的方式与衬底20或与设置在该衬底上的层连接,以形成空腔。惯性传感器或结构元件又与衬底20连接地具有在第一电极层22中的参考电极70。此外,惯性传感器或结构元件根据本发明与罩连接地具有在第二电极层44中的另一参考电极80,其中,振动质量30沿垂直于参考电极70的主延伸平面(或垂直于另一参考电极80的主延伸方向或衬底20的主延伸方向)的方向在两侧是可偏移的,并且其中,振动质量30沿朝第一电极层22的偏移方向又具有柔性止挡31,其中,振动质量30的柔性止挡31借助弹簧元件32与振动质量30的主体连接。弹簧元件又在弹性层33中实现,该弹性层布置在一方面振动质量30的主体的层35与另一方面第一电极层22之间。振动质量30现在沿朝第二电极层44的偏移方向具有另一柔性止挡39,其中,振动质量30的另一柔性止挡39借助设置在振动质量30的主体的层35中的止挡元件38与弹簧元件32连接。用附图标记30
‘
标明传感器结构或振动质量30朝向衬底20的锚定部。在止挡元件38的上侧上(或者在振动质量30的主体的层35中)可以可选地布置有上粒结,即另一柔性止挡39可以构造为粒结,以便也可以朝向罩侧将止挡面保持得非常小。
28.在弹性层33中的弹簧元件32现在不但对于对在第一电极层22中的底部电极的止挡而且对于在振动质量30的主体的层35与罩40之间的止挡起弹簧元件作用,在这种情况下,罩40包括布线层面(或者说第二电极层44)。因此,按照图2实现非常紧凑的两侧弹性的止挡。
29.有利地,可运动的传感器结构无电位地止挡在固定止挡上,因为否则会导致在可运动的传感器结构与固定电极之间的电气短路并且因此导致传感器失灵。因此,图2的布置可视为极其简化的,以便阐明本发明的基本原理。
30.图3示出关于无电位细化的根据本发明的布置。基本布置与在图2中相同,然而在此,固定的止挡面在传感器结构之上(在第二电极层44中形成)和之下(在第一电极层22中形成)位于分开的电位上,该电位典型地与可运动的传感器结构(即振动质量30)的电位一致。由此防止在止挡期间的电气短路,并且使在固定止挡与可运动止挡的接触面之间的静电吸引力最小化并且因此使粘住风险最小化。不同于按照图2的示图,因此在按照图3的变型中,在第一电极层22的平面中与柔性止挡31相邻地布置有刚性止挡71,并且在第二电极层44的平面中与另一柔性止挡39相邻地布置有另一刚性止挡81。由此,在振动质量30朝第一电极层22的平面的方向(即按照示图向下)(至少局部地)偏移时,通过刚性止挡71限制柔性的止挡31和振动质量30的偏移。此外,在振动质量30朝第二电极层44的平面的方向(即按照示图向上)(至少局部地)偏移时,通过另一刚性止挡81限制另一柔性止挡39和振动质量30的偏移。因此根据本发明,不但可以利用弹簧元件32朝底部电极(或者第一电极层22)的弹性作用,而且可以利用朝罩(或者第二电极层44)的弹性作用,即实现同时沿两个离开平面(out of plane)-方向有效的弹性的z止挡。特别有利的是,这可以特别紧凑地实现,因为通过利用柔性层或者说弹性层33的相对较小的层厚度已经能够借助相对较短的弯梁实现较软的弹簧元件和因此实现特别紧凑的弹性止挡。
31.在两个图2和3中分别示出传感器结构的截面图,在此示出了传感器结构(或者振动质量30)的中央锚定部30
‘
和弹性止挡的截面。然而,弹性止挡在真实的传感器结构中仅需要传感器面的较小部分。为了直观阐明这一点,图4示出沿着另一截平面的另一横截面,在该横截面中不存在止挡结构。图5至8分别示出在根据本发明的微机械惯性传感器或结构元件的结构中针对不同平面或层的示意性俯视图,其中,分别给定截平面a-b和截平面c-d;在图2和3中所示的截面图相应于在图5至8中的截平面a-b,并且在图4中所示的截面图相应于在图5至8中的截平面c-d。图5在此示出参考电极70(或第一电极层22)的平面和刚性止挡71(或固定止挡)。在刚性止挡71的中间标出如下区域:该区域给定用于柔性止挡31的粒结止挡(在弹性层33的下侧上)的止挡位置71
‘
。在图6中示出弹性层33的结构,在该结构中实现弹簧元件32:除柔性止挡31在弹性层33的下侧上标记的传感器粒结之外,也示出在柔性层33与振动质量30的主体的层35之间在弹性弯梁的区域中的接触孔34
‘
。出于简单性的原因省略示出在振动质量30的区域中在这些层之间的其它接触孔,而且也未示出贯穿孔,贯穿孔通常在可运动的结构中需要,以便能够时间上高效地除去在可运动的结构之下的牺牲氧化物(opferoxide)。图7示出振动质量30的主体的层35的结构,尤其也示出朝向罩侧的止挡元件38,该止挡元件具有可选地位于其上的另一柔性止挡39的止挡粒结。图8示出分析评估电极(或另一参考电极80)在第二电极层44中以及固定止挡(或另一刚性止挡81)在罩侧上的可能布置。该布置极其类似于在按照图5的第一电极层22中的布置,当然,可用电极面的布置相比于图5是镜像的,以便探测传感器结构的旋转偏移。这在图5和8中通过不同电极在相应的电极层22、44内不同的阴影可辨识。
32.图9和10示出用于实现振动质量30的主体的层35的示意图,尤其用于朝向罩侧、即用于朝罩的方向止挡的上粒结(即在止挡元件38上可选地位于另一柔性止挡39上的止挡粒
结)的可能的制造方法。在此分别示出振动质量30的主体的层35。图9(具有子图a、b和c)示出:如何通过第一掩膜(子图b)掩盖待制造的粒结351的区域并且层35的剩余部分350在一段时间上被蚀刻留下。因为一般足够的是,实现小于100nm的粒结高度,并且振动质量30的主体的层35的典型厚度位于10-30μm的范围内,所以该过程即使时间控制也能够足够好地限定。在子图9c中示出:如何借助第二掩膜实现用于层35的原本的功能沟槽352。图10(具有子图a、b、c和d)示出利用嵌埋的硬掩膜(即结构化的氧化层作为掩膜)的替代的制造方法,其相比于按照图9的方法需要两个附加的层沉积,但利用相同的掩膜数足够应付。在子图10a中,在层35上沉积薄氧化层353并且将其借助第一掩膜结构化。在子图10b中示出紧接着(可选地利用随后的借助cmp(化学机械抛光)进行平滑化)进行聚硅层沉积354,并且通过漆掩膜355限定粒结356的区域。紧接着,在子图10c所示地,实现功能沟槽357,通过其不但蚀刻在氧化层353之上的聚硅层,而且通过氧化掩膜使层35的位于其之下的部分结构化。紧接着,在子图10d中除去漆掩膜355和氧化层353。
33.即使各实施例主要针对z加速度传感器进行阐述,但根据本发明的微机械惯性传感器或结构元件同样涉及其它mems结构元件,如例如转速传感器、微镜或共振器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1