一种振动辅助加工用纳米微定位平台的制作方法
1.本实用新型涉及振动装置给进装置的领域,尤其涉及一种振动辅助加工用纳米微定位平台。
背景技术:
2.对于振动辅助加工装置,综合考虑运动精度、静动态性能、解耦能力、以及加工范围等因素,基于纳米定位平台的方案更适合非共振型超声椭圆振动辅助加工系统的设计与实现。基于纳米微定位平台的方案更适合探针纳米加工系统的设计与实现,微定位平台是在微米级甚至纳米级的精度情况下,可以实现位置可控的核心机构。平台的运动分辨率和工作空间决定了系统加工分辨率、范围,因此设计大行程、高精度、小型化的纳米微定位平台,提高系统的集成化和一体化,并在此基础上增大系统加工范围,是目前微定位平台所急需解决的问题。
技术实现要素:
3.本实用新型提供一种振动辅助加工用纳米微定位平台,在满足工作行程条件下扩大平台的工作行程和消除系统的耦合误差,平台通过三级位移放大机构扩大工作行程,利用平行轴式柔性铰链和双复合式平行移动副构成解耦机构,消除了运动耦合误差。
4.本实用新型为实现上述目的,采用以下技术方案:
5.一种振动辅助加工用纳米微定位平台,包括平台本体,平台本体上开设有xy平台安装槽,xy平台安装槽内安装有xy平台,xy平台的左右两侧铰接有x向双复合式平行移动副且前后两侧铰接有y向双复合平行移动副,x向双复合式平行移动副、y向双复合平行移动副均通过平行轴式柔性铰链铰接有scott-russell(斯科特-拉塞尔)放大机构,scott-russell放大机构连接有二级杠杆放大机构,二级杠杆放大结构一侧设有压电陶瓷驱动器。
6.平台本体的左上角、右下角设有压电陶瓷驱动器安装槽,压电陶瓷驱动器安装在对应的压电陶瓷驱动器安装槽内,压电陶瓷驱动器的输出端抵触在二级杠杆放大机构上。
7.平台本体上对应开设有与压电陶瓷驱动器安装槽连通的二级杠杆结构安装槽,二级杠杆放大机构包括平行设置的第一放大杆和第二放大杆,第一放大杆、第二放大杆均铰接在二级杠杆结构安装槽内壁上,第一放大杆、第二放大杆之间铰接有直圆柔性铰链,压电陶瓷驱动器的输出端抵触在第一放大杆上。
8.平台本体上对应开设有与二级杠杆结构安装槽连通的scott-russell放大机构安装槽,scott-russell放大机构包括驱动杆和输出杆,驱动杆一端铰接在scott-russell放大机构安装槽内壁上,驱动杆与输出杆中间位置铰接,输出杆一端与第二放大杆铰接且另外一端与平行轴式柔性铰链铰接。
9.x向双复合式平行移动副包括两个第一移动板,两个第一移动板与xy平台侧壁之间铰接有两个第一连杆,第一移动板通过平行轴式柔性铰链与对应的第二放大杆铰接,平台本体上对应第一移动板、第一连杆设有安装槽。
10.y向双复合平行移动副包括两个第二移动板,两个第二移动板与xy平台侧壁之间铰接有两个第二连杆,第二移动板通过平行轴式柔性铰链与对应的第二放大杆铰接,平台本体上对应第二移动板、第二连杆设有安装槽。
11.平台本体上设有若干连接孔。
12.本实用新型的有益效果是:本实用新型在满足工作行程条件下扩大平台的工作行程和消除系统的耦合误差,平台通过三级位移放大机构扩大工作行程,利用平行轴式柔性铰链和双复合式平行移动副构成解耦机构,消除了运动耦合误差。
附图说明
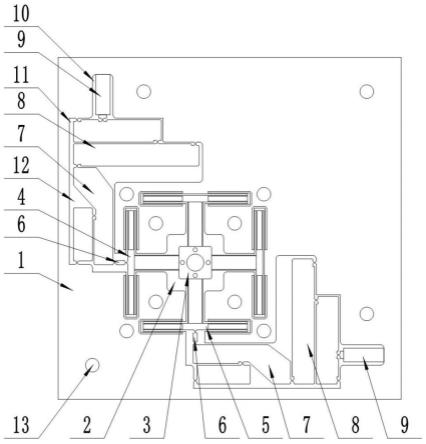
13.图1为本实用新型的结构示意图;
14.图2为本实用新型省略压电陶瓷驱动器后的立体图;
15.图3为平行轴式柔性铰链的结构示意图;
16.图4为直圆柔性铰链的结构示意图;
17.图5为二级杠杆放大机构、scott-russell放大机构的原理图;
18.图中:1-平台本体;2-xy平台安装槽;3-xy平台;4-x向双复合式平行移动副;5-y向双复合平行移动副;6-平行轴式柔性铰链;7-scott-russell放大机构;8-二级杠杆放大机构;9-压电陶瓷驱动器;10-压电陶瓷驱动器安装槽;11-二级杠杆结构安装槽;12-scott-russell放大机构安装槽;13-连接孔;
19.41-第一移动板;42-第一连杆;
20.51-第二移动板;52-第二连杆;
21.71-驱动杆;72-输出杆;
22.81-第一放大杆;82-第二放大杆;83-直圆柔性铰链;
23.以下将结合本实用新型的实施例参照附图进行详细叙述。
具体实施方式
24.下面结合附图和实施例对本实用新型作进一步说明:
25.一种振动辅助加工用纳米微定位平台,如图1至图4所示,包括平台本体1,平台本体1上开设有xy平台安装槽2,xy平台安装槽2内安装有xy平台3,xy平台3的左右两侧铰接有x向双复合式平行移动副4且前后两侧铰接有y向双复合平行移动副5,x向双复合式平行移动副4、y向双复合平行移动副5均通过平行轴式柔性铰链6铰接有scott-russell放大机构7,scott-russell放大机构7连接有二级杠杆放大机构8,二级杠杆放大结构8一侧设有压电陶瓷驱动器9。
26.平台本体1的左上角、右下角设有压电陶瓷驱动器安装槽10,压电陶瓷驱动器9安装在对应的压电陶瓷驱动器安装槽10内,压电陶瓷驱动器9的输出端抵触在二级杠杆放大机构8上。
27.平台本体1上对应开设有与压电陶瓷驱动器安装槽10连通的二级杠杆结构安装槽11,二级杠杆放大机构8包括平行设置的第一放大杆81和第二放大杆82,第一放大杆81、第二放大杆82均铰接在二级杠杆结构安装槽11内壁上,第一放大杆81、第二放大杆82之间铰接有直圆柔性铰链83,压电陶瓷驱动器9的输出端抵触在第一放大杆81上。
28.平台本体1上对应开设有与二级杠杆结构安装槽11连通的scott-russell放大机构安装槽12,scott-russell放大机构7包括驱动杆71和输出杆72,驱动杆71一端铰接在scott-russell放大机构安装槽12内壁上,驱动杆71与输出杆72中间位置铰接,输出杆72一端与第二放大杆82铰接且另外一端与平行轴式柔性铰链6铰接。
29.x向双复合式平行移动副4包括两个第一移动板41,两个第一移动板41与xy平台3侧壁之间铰接有两个第一连杆42,第一移动板41通过平行轴式柔性铰链6与对应的第二放大杆82铰接,平台本体1上对应第一移动板41、第一连杆42设有安装槽。
30.y向双复合平行移动副5包括两个第二移动板51,两个第二移动板51与xy平台3侧壁之间铰接有两个第二连杆52,第二移动板51通过平行轴式柔性铰链6与对应的第二放大杆82铰接,平台本体1上对应第二移动板51、第二连杆52设有安装槽。
31.平台本体1上设有若干连接孔13。
32.本实用新型设计时,要求xy平台3具有两个自由度,为了提高系统的加工范围,xy平台3在x/y方向的运动行程大于150μm;为保证加工精度,xy平台3在x/y方向上的分辨率应优于5nm;在位移放大机构设计上,先通过刚性构件的设计方法,构建机构运动简图,确保刚性机构的运动传递的正确性,其次选择合适的柔性铰链替换刚性构件,从而完成柔性放大机构的设计,并且由于单级运动放大机构放大倍数有限,主要取决于自身尺寸,较大的尺寸将导致平台失去紧凑性,且材料的变形会损失一定的放大倍因此通常采用合理布局,多级放大机构串联使用,保证平台紧凑性的同时获得更高的行程;在解耦机构设计上,因为xy平台3设计的关键点在于柔性铰链的设计,既要考虑x、y两个方向的互相解耦,同时保证具有良好的静、动态特性,所以将柔性铰链并联使用,不仅可以有效消除非运动方向上的耦合误差,还能更好的保证平台各不同方向上的刚度和动态性能的一致性。
33.本实用新型工作时,压电陶瓷驱动器9给出一个初始位移和初始输入力,压电陶瓷驱动器9给二级杠杆放大结构8施加载荷;二级杠杆放大结构8通过杠杆的放大作用,实现对微位移的二次放大作用,scott-russell放大机构7,实现对微位移的第三级放大以及位移方向的变化,原理如图5所示;x向双复合式平行移动副4、y向双复合平行移动副5构成解耦机构,消除了运动耦合误差,xy平台3在x/y面内应具有良好的解耦能力,以避免加工过程中因为耦合问题影响加工质量,起到输出位移和导向的作用;xy平台3主要用于微定位平台的移动装置,因为xy平台3属于三级放大机构中的负载,为了减少能量损失,x、y方向上采用对称式的结构;平行轴式柔性铰链6主要采用并联结构,具有较高的转动精度且应力集中小,主要用于有效消除非运动方向上的耦合误差,更好的保证平台各不同方向上的刚度和动态性能的一致性。
34.上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种改进,或未经改进直接应用于其它场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1