PEM电解槽参数自适应跟随的电解制氢控制方法与流程
本发明涉及新能源内燃机掺氢混合燃烧领域,具体是pem电解槽参数自适应跟随的电解制氢控制方法。
背景技术:
1、在内燃机掺氢混合燃烧的技术领域中,由于氢气质量储氢密度偏低,车辆上携带高压氢源会造成成本较大,性价比较低,一直以来严重制约了掺氢内燃机的普及与推广,在车辆上承载高压氢源该种模式的制约下,氢气来源便成为该项技术的瓶颈问题。因此,在车辆上设置实时制取氢气的氢气发生器便成了当前解决氢源问题的主流方式。例如专利cn104329291a公开了一种车载碱性制氢装置,该装置涉及内燃机制氢机应用领域,该种车载碱性制氢装置在制氢控制方面效果并不好,不能体现环保,而且制氢效率较低,并且不具备可跟随输入功率变化而产氢量可调的技术优势。因此,如何实现内燃机掺氢混合燃烧种制氢控制问题,以解决制氢过过程中的环保问题,同时能够提高制氢效率和降低制氢的生产运营成本,是当前内燃机掺氢混合燃烧的技术领域中亟待解决的问题。
技术实现思路
1、本发明的目的在于提供pem电解槽参数自适应跟随的电解制氢控制方法,以实现pem电解槽制氢的稳定性、pid温度控制稳定性、氢气的流量动态变
2、化的压力控制稳定以及承压下的双液位汽水分离的排水控制稳定与有效性,并最终实现提高制氢效率且成本低廉。
3、为实现上述目的,本发明提供如下技术方案:
4、pem电解槽参数,即低于10us/cm的去离子水,电解为氢气和氧气,本发明中使用的pem电解槽产出的氢气流量范围为1~15slm区间内,输入功率为300~3560w区间内,自适应跟随的电解制氢控制方法,包括温度控制、压力控制、排水控制,具体步骤:
5、1.温度控制,以pem电解槽可工作的最高温度tmax为系统的温度阈值上限,以冰点tice为系统可工作的温度阈值下限。借助电解槽温度-功率(t-p)map:{tice,p0;t1,p1;...;tmax,pn}(n∈{5,6,7,8,9,10}),
6、步骤:
7、1)采集温度传感器t的当前反馈值ti,经lookup talble算子获得电解槽当前对应功率输入值pi;
8、2)借助对pem电解槽ui特性曲线(u-i){u0,i0;u1,i1;....;un,in}做插值运算,并得到pi相对应ui,ii值;
9、3)分别以ui,ii为控制目标值,当ui变动到ux和ux+1时,记uδx=ux-ui,uδx+1=ux+1-ux;同理,当ii变动到ix和ix+1时,记iδx=ix-ii,iδx+1=ix+1-ix;
10、4)根据pid控制原理,并对其做公式变换,得到
11、5)对pid控制做增量式处理,令:kptotal=kpukpi,eu(t)=uδx,ei(t)=iδx,kitotal=kuikii,kdtotal=kudkid,δeu(t)kidδei(t)=(uδx+1-uδx)+(iδx+1-iδx),
12、pid控制的增量式:
13、u(t)=kptotaluδxiδx+kitotal[(uδx+uδx+1)+(iδx+iδx+1)]+kdtotal[(uδx+1-uδx)+(iδx+1-iδx)]。
14、6)pid参数实现自适应调节,设置模糊子集,令e={nd(负下),nmd(负中下),nml(负中上),nu(负上),zo(零位),pd(正下),pmd(正中下),pml(正中上),pu(正上)},kptotal、kitotal、kdtotal的量化范围分别为(-1,1)、(-0.1,0.1)、(-10.10),根据模糊调参规则,运算一次迭代控制后最优的kptotal、kitotal、kdtotal的值,即kptotal=kptotal0+{ei,eci}p,kitotal=kitotal0+{ei,eci}i,kdtotal=kdtotal0+{ei,eci}d,其中,kptotal0、kitotal0、kdtotal0为pid算法参数设置的初始值,{ei,eci}p、{ei,eci}i、{ei,eci}d为通过模糊调整的调整值。
15、2.压力控制,本发明技术在pem电解槽阴极出口配装有压力传感器p1,在氢气储罐上装有压力传感器p2。在工作过程中,压力控制步骤:
16、1)开机状态,当系统上电时,首先判断p1是否在正常工作压力范围(pa,pb)之内。如果在范围内,启动电解槽,开始制氢增压,当p2压力到达控制阈值(ps-δe,ps+δe)范围内,电解槽停止制氢;若启动时,p1不在正常工作压力范围内,程序策略进入故障诊断状态,系统对传感器电压进行判断,给出故障码信息,而后做停机报警动作。
17、2)供氢状态,当p2压力达到设定压力时,系统进入供氢模式。在进入供氢模式后,储氢罐的电磁阀则打开。系统根据p2的压力变化量,根据公式:
18、
19、计算pem电解槽应制取的制氢量,即此时制氢速率,其中,设定为气体常数,为常数,vs为储气罐体积,ps为标准状态下大气压力,p2为当前储气罐压力,α为修正系数。
20、3)关机状态,当接收到外部发动机进入降载停机的状态反馈后,根据设置的停机流量-压力(q-p)map图,并参照p2值,通过查表函数索引到需求流量q,而后进行相应的功率控制,进而达到在关机状态下的控制目标。
21、3.排水控制,pem电解槽制氢的氢气的湿度比较大,在保压同时还要实现汽水分离与排水,本发明技术采用双液位传感器,利用压力差原理,来实现气液分离后的去离子水自动排入储水水箱,步骤:
22、1)运行时,控制器实时检测当前液位状态,当下液位ld为有效状态时,控制程序进入(ld有效,lu有效;ld有效,lu无效;ld无效,lu有效;ld无效,lu无效)逻辑判断过程。
23、2)处于“ld有效,lu有效”状态时,控制器控制电磁阀v2处于‘on’状态,进行排水。
24、3)处于“ld有效,lu无效”状态时,控制器控制电磁阀v2处于‘off’状态。
25、4)处于“ld无效,lu有效”状态时,控制器进入故障诊断状态,并发出故障报警信号,提示传感器故障,做检修维护处理。
26、5)处于“ld无效,lu无效”状态时间大于阈值hl时,启动诊断状态,故障提醒。
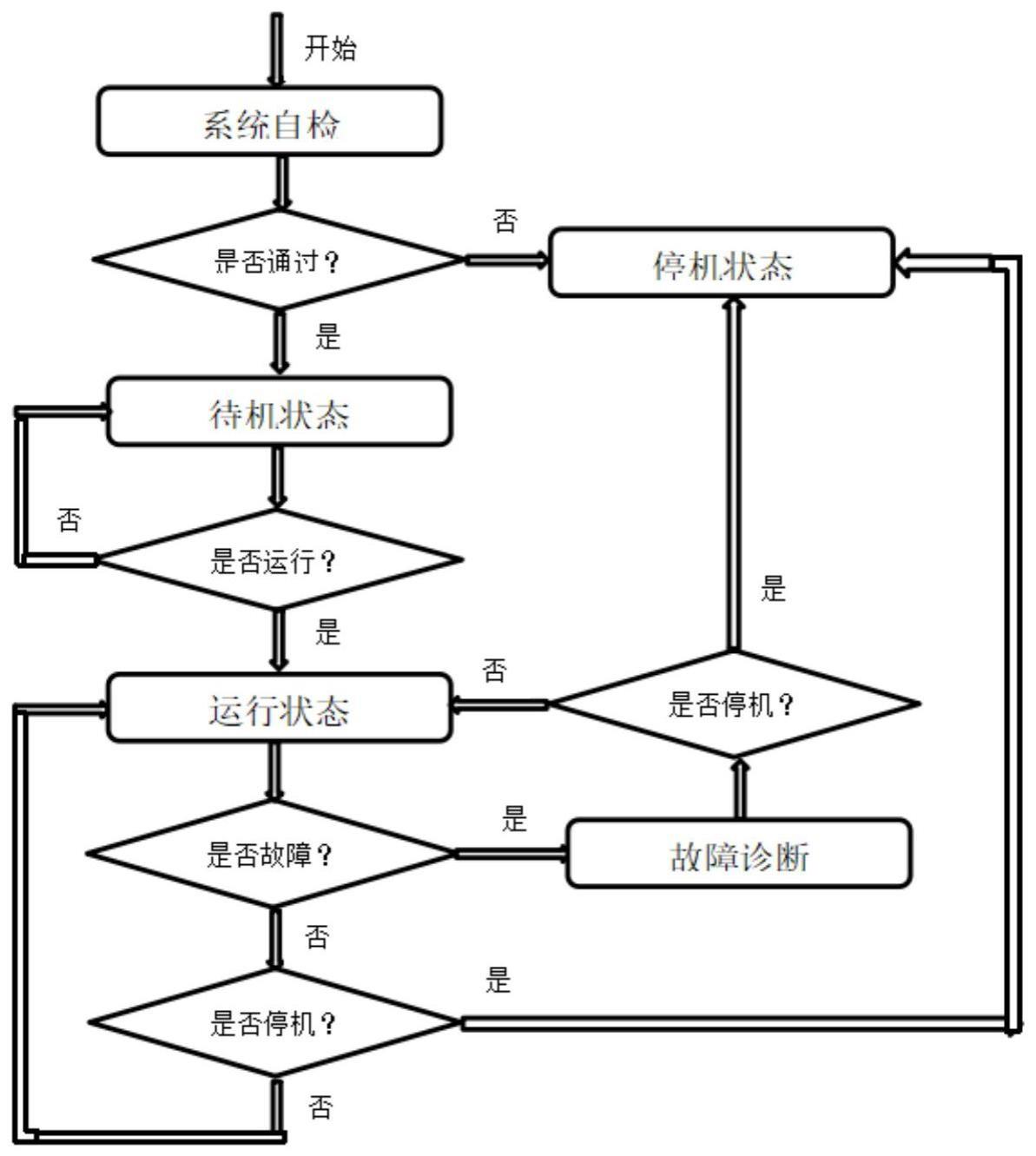
27、4.操作流程,本发明操作流程包括:自检、待机状态、运行状态、故障诊断和停机状态。
28、1)自检,检测控制器主要检测系统各种传感器的电信号是否在其正常工作的范围内,否则程序将会触发停机状态的转移,进入停机状态,并发出报警信至显示器。
29、2)待机状态,完成自检后自动转移至待机状态,为定时轮询机,启动指令触发时,自动转移至运行状态。
30、3)运行状态,自动周期地判断各传感器的输入信号,根据相应的控制策略,执行各执行器的动作执行,且单个周期均判断故障码数据,存在故障码抛出时,则会自动进入故障诊断状态,以判断是否进入停机状态,同时检测是否有停机信号输入,如有停机指令,则进入关机状态。
31、4)故障诊断,将压入队列的故障码按照设定的优先级原则,做相应分析与处理,再由主诊断策略程序给出停机的判断。
32、5)停机状态,低于温度tw后,水泵和风扇停止运行,待电解槽将在进入状态后即切断供电电源,再切断主断路器,直至完全处于停机状态。
33、与现有技术相比,本发明的有益效果是:
34、1、本发明pem电解槽采用离散化的局部自适应pid控制算法模型,以实现温度和功率的准确控制。
35、2、本发明pem电解槽具有可控电流工作态功能,当供电电源功率发生变化时,pem电解槽可以通过改变其工作电流,使其具有功率跟随的特点,以降低电解生产运营成本。
36、3、本发明技术在pem电解槽阴极出口配装有压力传感器p1,在氢气储罐上装有压力传感器p2,实现在制氢时能够确保氢气压力的控制准确性和稳定性。
37、4、本发明的双液位传感器,利用压力差原理,实现了气液分离后的去离子水自动排入储水水箱,实现汽水分离,且能够获得压力下的氢气,还实现汽水分离和排水。
- 还没有人留言评论。精彩留言会获得点赞!