顶驱、顶驱回转角度测量装置的制作方法
1.本实用新型涉及顶驱技术领域,具体涉及一种顶驱及顶驱回转角度测量装置。
背景技术:
2.现代钻井作业流程中,需要使用顶驱回转机构及搭载在顶驱回转机构上的吊环完成对钻杆或钻柱的操作。根据作业需要,顶驱回转机构需要通过调整角度完成与鼠洞、钻杆猫道,排管机或二层台井架工完成钻杆的交接,传统方式是司钻通过观察摄像头或其他作业者的手势进行顶驱旋转头的定位操作,该方式作业效率低,且容易产生安全事故。
技术实现要素:
3.本实用新型的目的在于克服现有技术的缺点,提供一种顶驱及顶驱回转角度测量装置。
4.根据本实用新型的第一方面,提供一种顶驱回转角度测量装置,所述顶驱包括顶驱本体以及可相对于该顶驱本体回转的旋转头,所述顶驱回转角度测量装置包括测距传感器和待测量部,所述测距传感器用于设置在所述顶驱本体和所述旋转头中的其中一者上,所述待测量部用于设置在所述顶驱本体和所述旋转头的另一者上,所述测距传感器的探测头与所述待测量部相对应,当所述测距传感器和所述待测量部中的其中一者随所述旋转头转动时,所述测距传感器与所述待测量部之间的距离呈现连续变化。
5.可选地,当所述测距传感器和所述待测量部中的其中一者随所述旋转头转动时,所述测距传感器与所述待测量部之间的距离逐渐增大或者逐渐减小。
6.可选地,所述待测量部呈倾斜状的弧线型结构。
7.可选地,所述待测量部呈蜿蜒延伸的斜面结构。
8.可选地,所述待测量部为绕所述旋转头的旋转轴线螺旋向上延伸或者螺旋向下延伸的线性结构。
9.可选地,所述顶驱回转角度测量装置包括标定构件,所述标定构件为用于贴合在所述顶驱本体的外表面和所述旋转头的外表面中的其中一者上的板状结构,所述待测量部位于所述板状结构的下边缘或者上边缘。
10.可选地,所述待测量部用于一体成型在所述顶驱本体和所述旋转头中的其中一者上。
11.可选地,所述测距传感器为电感式位移传感器、超声波测距传感器、激光传感器、红外测距传感器、位移传感器中的至少一者。
12.可选地,所述顶驱回转角度测量装置还包括与所述测距传感器连接的控制器,所述控制器用于将接收到的电信号转换成角度值。
13.根据本实用新型的第二方面,提供一种顶驱,包括上述的顶驱回转角度测量装置。
14.本实用新型至少具有以下有益效果:当旋转头相对于顶驱本体转动时,测距传感器与待测量部之间的距离会呈现出连续变化,由此可以根据测距传感器和待测量部之间的
距离变化计算出旋转头的旋转角度,由此,可以准确测量出旋转头的旋转角度,有利于提高作业效率,降低使用成本,无需操作人员手动对旋转头进行角度测量,可以避免发生安全事故,且有利于提高顶驱作业的自动化程度。
附图说明
15.图1为本实用新型示例性实施例提供的顶驱的结构示意图;
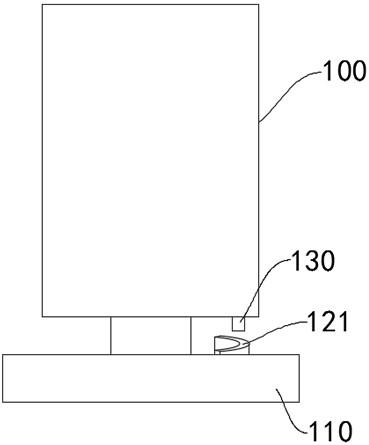
16.图2为图1的第一种视角的结构示意图;
17.图3为图1的第二种视角的结构示意图;
18.图中,100
‑
顶驱本体;110
‑
旋转头;120
‑
标定构件;121
‑
待测量部;130
‑
测距传感器。
具体实施方式
19.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本实用新型实施例的组件可以以各种不同的配置来布置和设计。
20.参照图1
‑
图3,根据本实用新型的第一方面,提供一种顶驱回转角度测量装置,该顶驱回转角度测量装置包括顶驱本体100以及可相对于该顶驱本体100回转的旋转头110,顶驱回转角度测量装置包括测距传感器130和待测量部121,测距传感器130用于设置在顶驱本体100和旋转头110中的其中一者上,待测量部121用于设置在顶驱本体100和旋转头110的另一者上,测距传感器130和标定构件120可以有两种布置方式,第一种:测距传感器130安装在顶驱本体100上,待测量部121设置在旋转头110上,第二种:测距传感器130安装在旋转头110上,待测量部121设置在顶驱本体100上,测距传感器130的探测头与待测量部121相对应,当测距传感器130和待测量部121中的其中一者随旋转头110转动时,测距传感器130与待测量部121之间的距离呈现连续变化。
21.在此之前,可以预先计算出旋转头110的旋转角度与测距传感器130和待测量部121之间距离的对应关系,例如,当旋转头110相对于初始位置旋转10
°
时,测距传感器130和待测量部121之间的距离为1.0cm,当当旋转头110相对于初始位置旋转20
°
时,测距传感器130和待测量部121之间的距离为1.2cm,即,旋转头110每旋转一定角度,旋转头110的旋转角度对应测距传感器130和待测量部121之间的距离是唯一的。基于此,当旋转头110相对于顶驱本体100转动时,测距传感器130与待测量部121之间的距离会呈现出连续变化,由此可以根据测距传感器130和待测量部121之间的距离变化计算出旋转头110的旋转角度,由此,可以准确测量出旋转头110的旋转角度,有利于提高作业效率,降低使用成本,无需操作人员手动对旋转头110进行角度测量,可以避免发生安全事故,且有利于提高顶驱作业的自动化程度。并且,由于测距传感器130不会待测量部121接触,这样可以大大提高测距传感器130的使用寿命,增加了作业流程的有效性。
22.进一步地,当测距传感器130和待测量部121中的其中一者随旋转头110转动时,测距传感器130与待测量部121之间的距离逐渐增大或者逐渐减小,换言之,当旋转头110的旋转角度逐渐增大时,测距传感器130与待测量部121之间的距离可以逐渐增大,也可以逐渐
减小,当旋转头110的旋转角度逐渐减小时,测距传感器130与待测量部121之间的距离可以逐渐减小,也可以逐渐增大,通过使测距传感器130和待测量部121之间的距离逐渐增大或者逐渐减小,可以获取到与距离值对应的唯一旋转角度值。可以理解,在旋转头110的顺时针旋转过程中,若测距传感器130和待测量部121之间的距离先增大再减小,或者先减小再增大,同理,在旋转头110的逆时针旋转过程中,若测距传感器130和待测量部121之间的距离先增大再减小,或者先减小再增大,这样可能存在两个相同的距离值,就会导致无法准确计算出两个相同距离值所对应的旋转角度,从而影响对旋转头110角度值的测量。
23.可选地,待测量部121呈倾斜状的弧线型结构,这里的倾斜是指相对于顶驱本体100的下表面而言,倾斜状的弧线型结构是指该弧线型结构大致弯曲地向上延伸,由此,旋转头110相对顶驱本体100转动时,测距传感器130与待测量部121之间的距离就会产生变化,从而准确地测量出旋转头110的旋转角度。
24.可选地,待测量部呈蜿蜒延伸的斜面结构,采用面结构相比线结构而言,可以增加待测量部121的待测量面积,确保测量时,测距传感器130能够始终探测到待测量部121,从而确保测量的准确性。
25.进一步地,待测量部121构造为用于绕顶驱本体100或者旋转头110中的其中一者的周向延伸的直线型结构或者弧线型结构,也就是说,待测量部121可以为直线型结构或者弧线型结构,这里的直线型结构或者弧线型不仅仅是指待测量部121为线状结构,也可以是指标定构件120具有一外表面,呈线性结构的待测量部121为该外表面的一部分。
26.在一些实施例中,考虑到顶驱本体100和旋转头110之间的安装空间局限问题,将待测量部141设置在顶驱本体100或者旋转头110的周向表面上,由于增大了操作空间,可以方便安装待测量部141和测距传感器130。
27.在一些实施例中,待测量部121可以为绕旋转头110的旋转轴线螺旋向上延伸或者螺旋向下延伸的线性结构, 例如,待测量部121可以类似于弹簧的形状,呈螺旋地延伸。
28.参照图2和图3,具体而言,顶驱回转角度测量装置包括标定构件120,标定构件120为用于贴合在顶驱本体100的外表面和旋转头110的外表面中的其中一者上的板状结构,待测量部121位于板状结构的下边缘或者上边缘,当标定构件120位于顶驱本体100的外表面时,待测量部121设置在板状结构的下边缘,当标定构件120位于旋转头110的外表面时,待测量部121设置在板状结构的上边缘,由于标定构件120可以贴合在顶驱本体100或者旋转头110的外表面,这样可以降低标定构件120向顶驱本体100或者旋转头110的径向延伸的占用空间,从而使得顶驱回转角度测量装置的结构更加地紧凑。
29.待测量部121用于一体成型在顶驱本体100和旋转头110中的其中一者上,也就是说,待测量部121也可以是顶驱本体100和旋转头110本身结构的一部分,例如,在顶驱本体100或旋转头110的外表面截取一部分实体,使得在顶驱本体100或旋转头110的外表面可以形成向其周向延伸的直线型结构或者弧线型结构、或者螺旋形结构。这样无需另外制作作为标定构件120的零件,而直接采用顶驱本体100或者旋转头110加工出标定构件120,有利于降低制造成本。
30.本实用新型可选的实施例中,测距传感器130为电感式位移传感器、超声波测距传感器130、激光传感器、红外测距传感器130、位移传感器中的至少一者。当测距传感器130为电感式位移传感器时,标定构件120应当为金属结构,以使电感式位移传感器能够感知标定
构件120,另外,电感式位移传感器还能够在恶劣环境下使用,例如,电感式位移传感器不受风沙、雨雪等影响。
31.顶驱回转角度测量装置还包括与测距传感器130连接的控制器(图中未示出),控制器可以采用任意合适的型号,例如控制器可以采用欧姆龙c200hx
‑
cpu44
‑
e。控制器用于将接收到的电信号转换成距离值,控制器可以为plc。控制器与测距传感器130之间可以通过无线连接,无线连接相比有线连接,可以降低因机构运动对导线的干涉。
32.根据本实用新型的第二方面,提供一种顶驱,该顶驱包括上述的顶驱回转角度测量装置。
33.根据本实用新型的第三方面,提供一种顶驱回转角度测量方法,该顶驱回转角度测量方法应用于上述的顶驱回转角度测量装置,该测量方法包括待测量部121至少包括第一测量点和第二测量点,定义第一测量点相对第二测量点靠近于测距传感器130,驱动旋转头110相对顶驱本体100回转,当旋转头110由对应于第一测量点的第一位置向对应于第二测量点的第二位置转动时,这里的第一位置可以为旋转头110的初始位置,分别记录测距传感器130在第一位置处的测距传感器130与第一测量点之间的距离值以及测距传感器130在第二位置处的测距传感器130与第二测量点之间的距离值,并根据测距传感器130与第一测量点之间的距离值以及测距传感器130在第二位置处的测距传感器130与第二测量点之间的距离值进行换算,从而获得旋转头110的转动角度。
34.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1