一种可移动式注浆设备的制作方法
1.本实用新型属于注浆设备技术领域,涉及一种可移动式注浆设备,特别适合于需要经常移动、空间受限且需要精确注浆的场合。
背景技术:
2.随着国家基础建设投资增加,如房建、铁路建设等基建工程也随之增加,而作为房建地基注浆加固以及铁路建设施工过程中的帷幕注浆施工也随之增多,这就对注浆设备有大量的需求。
3.目前,房建地表加固注浆和隧道内掌子面帷幕注浆采用的注浆设备为分体式结构,搅拌桶、储浆桶及注浆泵为单独体,在现场组装连接,有的甚至在现场挖个坑作储浆桶,施工现场混乱,施工环境差,不仅所占空间巨大,无法实现快速移动,另外,该注浆系统在调制浆液及注浆控制时均由工人经验掌握,无法实现精确注浆及注浆参数监控,也无法实现自动制浆和精确注浆。
技术实现要素:
4.本实用新型的目的在于克服现有技术中的不足,提供了一种可移动式注浆设备,采用两个集成可移动的制浆单元和注浆控制单元,方便快速移动。
5.为解决上述技术问题,本实用新型提供了一种可移动式注浆设备,其特征是,包括:制浆单元和注浆控制单元;
6.所述制浆单元用来将水泥制成水泥浆液,所述注浆控制单元用来将水泥浆液注入注浆孔内完成注浆;
7.所述制浆单元和注浆控制单元均可拆卸地安装在驱动车上。
8.进一步的,所述驱动车包括轮式拖车一和轮式拖车二,所述制浆单元可拆卸地安装在轮式拖车一上,所述注浆控制单元可拆卸地安装在轮式拖车二上。
9.进一步的,所述轮式拖车一和轮式拖车二之间通过链条连接。
10.进一步的,所述制浆单元包括储料仓、螺旋输送机、高速制浆机和储浆桶;所述注浆控制单元包括双液注浆泵和智能电控柜;
11.所述储料仓安装在轮式拖车一车架上,储料仓的上端开设有加料口,储料仓的下端出口连接振动机入口,振动机的出口通过气动卸灰阀与螺旋输送机的进料口连接;螺旋输送机的输出口与高速制浆机的输入口连接;
12.所述高速制浆机的输出口通过气动阀连通储浆桶的输入口,储浆桶的输出口与双液注浆泵通过输浆软管连通;
13.所述气动卸灰阀和气动阀的控制端通过控制电缆连接注浆控制单元中的智能电控柜,由智能电控柜控制气动卸灰阀和气动阀的关闭开启;
14.所述双液注浆泵的控制端连接智能电控柜,由智能电控柜控制双液注浆泵的启动停止。
15.进一步的,在储料仓的外壁上下位置安装料位监测传感器,位于上方的料位监测传感器用来监测料位的上限,位于下方的料位监测传感器用来监测料位的下限,当监测到料位达到上限,则停止加料,当监测到料位达到下限,则继续加料。
16.进一步的,在储浆桶和双液注浆泵间的输浆软管上通过螺栓固定有电磁流量计,用于测量从储浆桶流入双液注浆泵的水泥浆流量。
17.进一步的,所述轮式拖车一车架顶部安装有活动护栏。
18.进一步的,所述轮式拖车一上还设置有拖车支腿,所述可伸缩支腿能够向外伸出及回缩。
19.进一步的,所述轮式拖车一上还设置有爬梯。
20.进一步的,所述储浆桶上加装电机,储浆桶内加装螺旋桨,电机驱动螺旋桨转动来搅动浆液。
21.进一步的,所述双液注浆泵出口处的硬管上通过螺栓安装有压力传感器;压力传感器用来采集注浆压力,当注浆压力达到设定值后控制双液注浆泵停止注浆并清洗注浆机。
22.进一步的,所述轮式拖车二上还设置有拖车支腿二,所述可伸缩支腿二能够向外伸出及回缩。
23.与现有技术相比,本实用新型所达到的有益效果是:采用两个集成可移动的小单元,不仅解决了注浆设备分散、体积大、不易移动及自动制浆和精确注浆的问题,也实现了制浆和注浆智能控制,同时提高了制浆和注浆效率,改善了现场施工环境。
附图说明
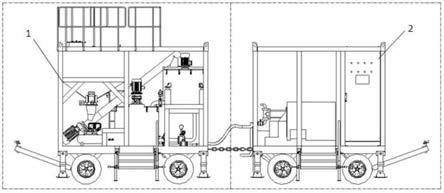
24.图1为移动式注浆系统结构组成图;
25.图2为移动式注浆系统的俯视图;
26.图3为制浆单元结构组成图;
27.图4为注浆控制单元结构组成图。
28.附图标记:1、制浆单元;2、注浆控制单元;3、输浆软管;4、控制电缆;5、链条;
29.101、活动护栏;102、加料口;103、储料仓;104、料位监测传感器;105、振动机;106、气动卸灰阀;107、螺旋输送机;108、空压机;109、轮式拖车一;110、高速制浆机;111、气动阀;112、储浆桶;113、电磁流量计;114、拖车支腿一;115、爬梯;
30.201、双液注浆泵;202、压力传感器;203、智能电控柜;204、轮式拖车二;205、拖车支腿二。
具体实施方式
31.下面结合附图对本实用新型作进一步描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
32.本实用新型的一种可移动式注浆设备,结构参见图1-图4所示,包括制浆单元1和注浆控制单元2;所述制浆单元1和注浆控制单元2均可拆卸地设置在驱动车上,所述驱动车能够带动制浆单元1和注浆控制单元2移动。驱动车可以采用现有技术中的轮式拖车或履带式底盘行走机构,制浆单元1和注浆控制单元2可以设置在一个驱动车上,也可以分别设置
在两个驱动车上,两个驱动车之间可拆卸式连接。参见图1所示,本实用新型采用两个轮式拖车来分别承载制浆单元1和注浆控制单元2,两个轮式拖车分别记为轮式拖车一109和轮式拖车二204,轮式拖车一109用来承载制浆单元1,轮式拖车二204用来承载注浆控制单元,轮式拖车一109和轮式拖车二204之间通过链条5来连接,链条5可以柔性或刚性材料替代。制浆单元1与注浆控制单元2间通过输浆软管3、控制电缆4连接。工作时,将可移动式注浆设备通过轮式拖车运输至施工场所,通过输浆软管3、控制电缆4将制浆单元1与注浆控制单元2连接,用链条5通过销钉将两个轮式拖车连接一起,可以防止误操作移动两单元造成输浆软管3和控制电缆4被拉断。
33.制浆单元1负责配料、搅拌、储浆,注浆控制单元2负责精确控制制浆的流程及负责浆液输送、注浆等。
34.制浆单元的结构参见图3所示,制浆单元包括储料仓103、螺旋输送机107、高速制浆机110和储浆桶112;
35.所述储料仓103与轮式拖车一109车架焊接成一体,或通过螺栓安装于轮式拖车一109车架上。储料仓103的上端开设有加料口102,水泥通过加料口102加入到储料仓103中。为了监测储料仓103内水泥量,需要能时刻对储料仓内料位进行监测,在储料仓103的外壁上下位置安装料位监测传感器104(检测部位伸到储料仓里),料位监测传感器104的输出端连接智能电控柜203;位于上方的料位监测传感器104用来监测料位的上限,位于下方的料位监测传感器104用来监测料位的下限,当监测到料位达到上限,则停止加料,当监测到料位达到下限,则继续加料。
36.储料仓103的下端呈锥形,储料仓103的下端出口连接振动机105入口,振动机105的出口通过气动卸灰阀106与螺旋输送机107的进料口连接。
37.所述螺旋输送机107倾斜设置在轮式拖车的车架内,螺旋输送机107的输出口与高速制浆机110的输入口连接并固定,螺旋输送机107将水泥输送到高速制浆机110内进行制浆。
38.所述高速制浆机110和储浆桶112通过螺栓固定于轮式拖车一109车架上;所述高速制浆机110的输出口通过气动阀111连通储浆桶112的输入口,储浆桶112的输出口与双液注浆泵201的输入口通过输浆软管3连通;在储浆桶112和双液注浆泵201间的输浆软管3上通过螺栓固定有电磁流量计113,电磁流量计113用于测量从储浆桶112流入双液注浆泵201的水泥浆流量。
39.在轮式拖车109上,空压机108固定于轮式拖车上109上,并通过气管与气动卸灰阀106、气动阀111相连接;为气动阀阀关闭开启提供动力。气动卸灰阀106和气动阀111的控制端通过控制电缆4连接注浆控制单元2中的智能电控柜203,由智能电控柜203控制气动卸灰阀106和气动阀111的关闭开启。
40.优选的,在车架顶端,活动护栏101通过拖车车架上的安装孔安装于轮式拖车一109车架顶部;活动护栏主要起安全防护作用,但人、物在上面时,防止跌落。
41.在轮式拖车一109上还设置有拖车支腿114,拖车支腿114通过螺栓固定于拖车底盘四周。所述可伸缩支腿114能够向外伸出及回缩。
42.在轮式拖车一109上还设置有爬梯115,以方便人工登上轮式拖车一109上对制浆单元1进行检查。
43.为防止浆液凝固,储浆桶112上加装电机,储浆桶112内加装螺旋桨,电机驱动螺旋桨按一定速度转动来搅动浆液。
44.注浆控制单元2的具体结构参见图4所示,所述注浆控制单元2包括双液注浆泵201和智能电控柜203;
45.所述双液注浆泵201的控制端连接智能电控柜203,由智能电控柜203控制双液注浆泵201的启动停止。
46.双液注浆泵201通过螺栓安装于轮式拖车二204车架上,双液注浆泵201出口处的硬管上通过螺栓安装有压力传感器202;压力传感器202的输出端连接智能电控柜203,压力传感器用来采集注浆压力,当注浆压力达到设定值后,智能电控柜203控制双液注浆泵201停止注浆并清洗注浆机。
47.智能电控柜203通过螺栓安装于轮式拖车二204车架上。智能电控柜203主要采集各个传感器的数据,并给出相应控制指令来控制阀的开启或者关闭。
48.在轮式拖车二204上还设置有拖车支腿二205,拖车支腿二205通过螺栓固定于拖车底盘四周。所述可伸缩支腿二205能够向外伸出及回缩。
49.本实用新型系统的工作过程为:
50.制浆单元1的工作过程为:制浆单元工作时,运料设备或者人工通过加料口102将水泥加至储料仓103中,当料位监测传感器104监测到储料仓103内水泥加至上限时停止加料,当料仓水泥降至下限时进行加料;储料仓103中的水泥通过振动机105、气动卸灰阀106将水泥投入到螺旋输送机107,并运输送到高速制浆机110中;智能电控柜203内控制程序根据投入的水泥量,加入适当比例的水,在高速制浆机110中快速混合制成浆液;当浆液制好(制浆时间控制)后,控制气动阀111开启,将浆液引流到储浆桶112中储存,为防止浆液凝固,控制储浆桶112上的电机带动螺旋桨按一定速度转动,完成整个制浆操作。
51.注浆单元2的工作过程为:注浆单元工作时,制浆单元1中储浆桶103通过输浆软管3给双液注浆泵201供水泥浆,通过双液注浆泵201加压后通过软管注入注浆孔内完成注浆。当压力传感器监测注浆压力达到设定值后,智能电控柜203控制双液注浆泵201停止注浆并清洗注浆机。
52.本实用新型中智能电控柜通过控制模块实现自动控制配料、制浆、搅拌、输送及注浆等,实现智能控制。
53.本实用新型的一种可移动式注浆系统,该系统分为制浆单元和注浆控制单元,两部分相互独立,通过输浆软管和控制线路连接。该系统不仅实现了实时监控制浆和注浆数据,也解决了注浆设备分散、体积大、不易移动及自动制浆和精确注浆的问题,同时改善了现场施工环境,提高了注浆效率。
54.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1