被动式磁测距防碰方法及装置与流程
本发明涉及一种定向井钻井,是一种被动式磁测距防碰方法及装置。
背景技术:
1、目前,油田常用的井眼防碰方法是利用实测井眼轨迹参数拟合出井眼轨迹,使用防碰扫描算法计算出钻进井与邻井的井眼轨迹间的位置关系,当相对距离小于安全距离时预警,并采取积极的绕障措施,来避免井眼交碰事故的发生。但由于测量仪器和计算模型存在误差,该类方法在密集丛式井的防碰过程中效果并不理想。近年来,国内外也陆续发展出一系列新型井眼防碰技术,包括钻头振动信号防碰技术、声波探测防碰技术和电磁波探测防碰技术,但需要对相邻已钻井进行磁激励或加入井下磁源,且计算复杂,成本高,钻井效率低。
技术实现思路
1、本发明提供了一种被动式磁测距防碰方法及装置,克服了上述现有技术之不足,其能有效解决现有井眼防碰方法存在的需对相邻已钻井进行磁激励或加入井下磁源,成本高的问题。
2、本发明的技术方案之一是通过以下措施来实现的:一种被动式磁测距防碰方法,包括:
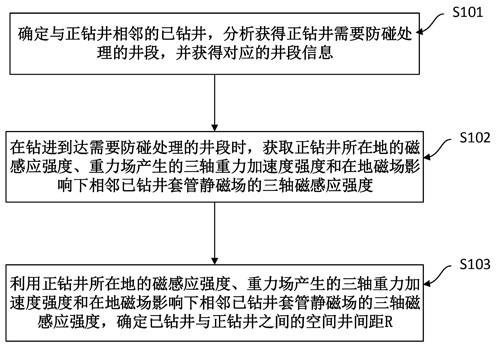
3、确定与正钻井相邻的已钻井,分析获得正钻井需要防碰处理的井段,并获得对应的井段信息,其中井段信息包括:井深、扫描半径和扫描角;
4、在钻进到达需要防碰处理的井段时,获取正钻井所在地的磁感应强度、重力场产生的三轴重力加速度强度和在地磁场影响下相邻已钻井套管静磁场的三轴磁感应强度;
5、利用正钻井所在地的磁感应强度、重力场产生的三轴重力加速度强度和在地磁场影响下相邻已钻井套管静磁场的三轴磁感应强度,通过下式确定已钻井与正钻井之间的空间井间距r;
6、bg=(1-μ0)r cosθ+(1-μ0)r sinθ+1/2(1+μ0)r sin 2θ
7、其中,bg为相邻已钻井套管的套管磁场值;θ为以正钻井井眼为圆的中心到已钻井井眼中心的方位角;μ0为钻井套管磁干扰与方位、距离相对应的修正系数。
8、下面是对上述发明技术方案的进一步优化或/和改进:
9、上述利用获取正钻井所在地的磁感应强度、重力场产生的三轴重力加速度强度和在地磁场影响下相邻已钻井套管静磁场的三轴磁感应强度,确定已钻井与正钻井之间的空间井间距r,包括:
10、根据在地磁场影响下相邻已钻井套管静磁场的三轴磁感应强度,确定获取在地磁场影响下相邻已钻井套管静磁场的磁感应强度bt;
11、
12、其中,btx、bty、btz分别为在地磁场影响下相邻已钻井套管静磁场在x,y,z三个轴向方向上的分量;
13、确定相邻已钻井套管的套管磁场值bg;
14、bg=bt-b
15、其中,bt为在地磁场影响下相邻已钻井套管静磁场的磁感应强度;b为正钻井所在地点的磁感应强度;
16、根据重力场产生的三轴重力加速度强度和在地磁场影响下相邻已钻井套管静磁场的三轴磁感应强度,确定以正钻井井眼为圆的中心到已钻井井眼中心的方位角θ;
17、
18、其中,btx、bty、btz分别为在地磁场影响下相邻已钻井套管静磁场在x,y,z三个轴向方向上的分量;gx、gy分别为重力场在x,y两个轴向方向上的分量;
19、确定已钻井与正钻井之间的空间井间距r;
20、bg=(1-μ0)r cosθ+(1-μ0)r sinθ+1/2(1+μ0)r sin 2θ
21、其中,bg为相邻已钻井套管的套管磁场值;θ为以正钻井井眼为圆的中心到已钻井井眼中心的方位角;μ0为钻井套管磁干扰与方位、距离相对应的修正系数。
22、上述确定与正钻井相邻的已钻井,分析获取正钻井需要防碰处理的井段,并获得对应的井段信息,包括:
23、确定与正钻井相邻的已钻井;
24、以已钻井井口坐标为基准,确定已钻井与正钻井之间的坐标关系;
25、设置获取间隔,根据获取间隔获取正钻井的井眼轨道中不同测点处邻井分离系数;
26、判断邻井分离系数是否大于阀限值;
27、响应于是,则将对应井段确定为需进行防碰处理的井段,并获得该井段的井段信息。
28、上述获取间隔为钻进距离间隔,根据钻进距离间隔获取正钻井井眼轨道中各个测点位置处的邻井分离系数。
29、本发明的技术方案之二是通过以下措施来实现的:一种被动式磁测距防碰装置,包括地面控制系统和井下探测总成;
30、地面控制系统,确定与正钻井相邻的已钻井,分析获得正钻井需要防碰处理的井段,并获得对应的井段信息;控制井下探测总成在各个井段获取数据,接收已钻井与正钻井之间的空间井间距r;
31、井下探测总成,在钻进到达需要防碰处理的井段时采集防碰钻井数据,防碰钻井数据包括获取正钻井所在地的磁感应强度、重力场产生的三轴重力加速度强度和在地磁场影响下相邻已钻井套管静磁场的三轴磁感应强度;利用正钻井所在地的磁感应强度、重力场产生的三轴重力加速度强度和在地磁场影响下相邻已钻井套管静磁场的三轴磁感应强度,通过下式确定已钻井与正钻井之间的空间井间距r;
32、bg=(1-μ0)r cosθ+(1-μ0)r sinθ+1/2(1+μ0)r sin 2θ
33、其中,bg为当前井下已钻井套管的套管磁场值;θ为以正钻井井眼为圆的中心到已钻井井眼中心的方位角;μ0为钻井套管磁干扰与方位、距离相对应的修正系数。
34、下面是对上述发明技术方案的进一步优化或/和改进:
35、上述井下探测总成包括高精度井下测量探管、mwd信号传输单元和大功率泥浆涡轮发电机;
36、高精度井下测量探管,在钻进到达需要防碰处理的井段时采集防碰钻井数据,防碰钻井数据包括获取正钻井所在地的磁感应强度、重力场产生的三轴重力加速度强度和在地磁场影响下相邻已钻井套管静磁场的三轴磁感应强度;利用正钻井所在地的磁感应强度、重力场产生的三轴重力加速度强度和在地磁场影响下相邻已钻井套管静磁场的三轴磁感应强度,通过下式确定已钻井与正钻井之间的空间井间距r;
37、bg=(1-μ0)r cosθ+(1-μ0)r sinθ+1/2(1+μ0)r sin 2θ
38、其中,bg为当前井下已钻井套管的套管磁场值;θ为以正钻井井眼为圆的中心到已钻井井眼中心的方位角;μ0为钻井套管磁干扰与方位、距离相对应的修正系数;
39、mwd信号传输单元,传输接收的已钻井与正钻井之间的空间井间距r,同时将大功率泥浆涡轮发电机输出的交流电转化为直流电,为高精度井下测量探管供电;
40、大功率泥浆涡轮发电机,通过mwd信号传输单元为高精度井下测量探管供电。
41、上述高精度井下测量探管包括两端封闭的高抗磁性铍青铜保护壳,在高抗磁性铍青铜保护壳内设置有压力传感器、温度传感器、微控制模块、电源模块、高精度三轴磁通门传感器和高精度三轴加速度传感器,压力传感器、温度传感器、电源模块、高精度三轴磁通门传感器和高精度三轴加速度传感器均与微控制模块连接。
42、上述mwd信号传输单元包括微控制模块、交直流转换模块和脉冲发生器,高精度井下测量探管分别与微控制模块和交直流转换模块连接,微控制模块分别与脉冲发生器和交直流转换模块连接。
43、本发明分析获得正钻井需要防碰处理的井段,在进入到防碰处理的井段时,获取正钻井所在地的磁感应强度、重力场产生的三轴重力加速度强度和在地磁场影响下相邻已钻井套管静磁场的三轴磁感应强度,确定已钻井与正钻井之间的空间井间距,为定向井工程师控制井眼轨迹提供更加可靠准确的数据支撑,降低两井交碰的风险。本发明实施例公开的技术方案不需要对相邻已钻井进行磁激励或加入井下磁源,能大幅度提高钻井作业效率,降低成本,提高时效。
- 还没有人留言评论。精彩留言会获得点赞!