隧道掘进机操作参数地层自适应决策方法及系统
1.本发明涉及隧道掘进机操作参数决策技术领域,具体地,涉及一种隧道掘进机操作参数地层自适应决策方法及系统。
背景技术:
2.隧道掘进机是一种大型隧道掘进装备,以其开挖速度快、自动化程度高、施工质量好的优点,广泛地应用于地铁、铁路、公路等隧道工程中。但是,隧道掘进机对地质条件的适应性较差,如果操作参数设置不合理或不能和相应地质类型匹配,就会出现掘进速度慢等问题,甚至发生严重的施工事故。因此,如何选取适应不同地层类型的操作参数,在保证施工安全的前提下,提升设备的掘进性能,成为隧道掘进机施工领域的重点问题之一。
3.传统的隧道掘进机领域己有的掘进优化决策方法主要是通过历史施工数据和实验结果总结经验,建立专家系统指导掘进参数选择。采用专家系统的掘进参数优化方法主要依靠人为经验,难以准确体现性能指标与操作参数间的映射关系,同时未能定义明确的掘进参数优化目标,影响了参数优化的效果和决策模型的普适性。
4.专利文献cn102147826b公开了一种隧道掘进机在不同地质下最优掘进速度的计算方法,以掘进效能为优化目标,为施工中的掘进速度参数选定提供科学数据。计算方法分为以下几步:(1)确定推力计算模型中的待定系数;(2)确定扭矩计算模型中的待定系数;(3)基于推力和扭矩的表达式确定目标工程对应的比能表达式;(4)通过比能函数计算掘进速度范围,确定选定地质条件下的最优掘进速度。但该方法并未有效地解决操作参数设置不合理或不能和相应地质类型匹配的问题。
技术实现要素:
5.针对现有技术中的缺陷,本发明的目的是提供一种隧道掘进机操作参数地层自适应决策方法及系统。
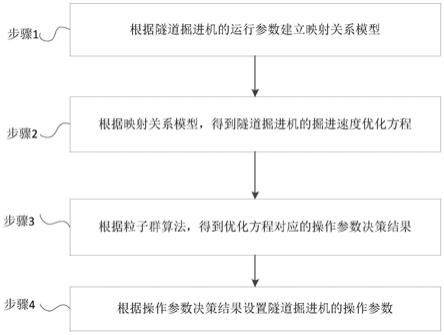
6.根据本发明提供的一种隧道掘进机操作参数地层自适应决策方法,包括如下步骤:
7.步骤1:根据隧道掘进机的运行参数建立映射关系模型;
8.步骤2:根据映射关系模型,得到隧道掘进机的掘进速度优化方程;
9.步骤3:根据粒子群算法,得到优化方程对应的操作参数决策结果;
10.步骤4:根据操作参数决策结果设置隧道掘进机的操作参数。
11.优选地,映射关系模型包括掘进速度预测模型和刀盘转矩预测模型。
12.优选地,步骤1包括:
13.步骤101:从运行参数中提取与隧道掘进机的掘进速度和刀盘转矩相关的操作参数,以及确定与操作参数对应的地质标签;
14.步骤102:根据操作参数和地质标签,确定对应的掘进速度和刀盘转矩;
15.步骤103:将操作参数、地质标签和掘进速度输入随机森林模型,得到掘进速度预
测模型;
16.步骤104:将操作参数、地质标签和刀盘转矩输入随机森林模型,得到刀盘转矩预测模型。
17.优选地,步骤2,包括:
18.步骤201:根据映射关系模型,构建以最大掘进速度为目标,以操作参数为控制变量的掘进速度优化方程。
19.优选地,操作参数包括以下至少一种:刀盘转速、螺旋输送机转速、总推力和土仓压力。
20.根据本发明提供的一种隧道掘进机操作参数地层自适应决策系统,包括:
21.模块m1:用于根据隧道掘进机的运行参数建立映射关系模型;
22.模块m2:用于根据映射关系模型,得到隧道掘进机的掘进速度优化方程;
23.模块m3:用于根据粒子群算法,得到优化方程对应的操作参数决策结果;
24.模块m4:用于根据操作参数决策结果设置隧道掘进机的操作参数。
25.优选地,映射关系模型包括掘进速度预测模型和刀盘转矩预测模型。
26.优选地,模块m1包括:
27.子模块m101:用于从运行参数中提取与隧道掘进机的掘进速度和刀盘转矩相关的操作参数,以及确定与操作参数对应的地质标签;
28.子模块m102:用于根据操作参数和地质标签,确定对应的掘进速度和刀盘转矩;
29.子模块m103:用于将操作参数、地质标签和掘进速度输入随机森林模型,得到掘进速度预测模型;
30.子模块m104:用于将操作参数、地质标签和刀盘转矩输入随机森林模型,得到刀盘转矩预测模型。
31.优选地,模块m2,包括:
32.子模块m201:用于根据映射关系模型,构建以最大掘进速度为目标,以操作参数为控制变量的掘进速度优化方程。
33.优选地,操作参数包括以下至少一种:刀盘转速、螺旋输送机转速、总推力和土仓压力。
34.与现有技术相比,本发明具有如下的有益效果:
35.1、本发明进行操作参数决策时无需依赖人为经验,仅需利用隧道掘进机自带的状态监测与传感器系统获取的运行参数即可实现操作参数决策。
36.2、本发明基于映射关系模型和优化模型的操作参数决策方法能够更好的揭示操作参数与优化目标之间的联系,并且可以根据特定优化目标,建立专门的优化方程,得出专门的参数决策结果。
37.3、本发明考虑了隧道掘进机在不同地质类型的地层中掘进时操作参数值的差异,将地质类型作为随机森林掘进速度预测模型和刀盘转矩预测模型的输入参数,提升了决策方法在不同地质类型下的准确性。
附图说明
38.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、
目的和优点将会变得更明显:
39.图1为本发明的流程示意图;
40.图2为本发明的掘进速度预测模型的效果示意图;
41.图3为本发明的刀盘转矩预测模型的效果示意图;
42.图4a为本发明的在福康宁卵石的地质类型中的粒子群算法寻优过程中的适应度值的变化趋势示意图;
43.图4b为本发明的在句容地层iv的地质类型中的粒子群算法寻优过程中的适应度值的变化趋势示意图;
44.图4c为本发明的在句容地层v的地质类型中的粒子群算法寻优过程中的适应度值的变化趋势示意图;
45.图4d为本发明的在海洋黏土的地质类型中的粒子群算法寻优过程中的适应度值的变化趋势示意图。
具体实施方式
46.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
47.图1为本发明的流程示意图,如图1所示,本发明提供了一种隧道掘进机操作参数地层自适应决策方法,包括如下步骤:
48.步骤1:根据隧道掘进机的运行参数建立映射关系模型。
49.其中,映射关系模型包括掘进速度预测模型和刀盘转矩预测模型。
50.优选地,步骤1包括:步骤101:从运行参数中提取与隧道掘进机的掘进速度和刀盘转矩相关的操作参数,以及确定与操作参数对应的地质标签;步骤102:根据操作参数和地质标签,确定对应的掘进速度和刀盘转矩;步骤103:将操作参数、地质标签和掘进速度输入随机森林模型,得到掘进速度预测模型;步骤104:将操作参数、地质标签和刀盘转矩输入随机森林模型,得到刀盘转矩预测模型。
51.具体地,从隧道掘进机海量的运行参数中选取与隧道掘进机的掘进速度和刀盘转矩密切相关的隧道掘进机的操作参数,其中,运行参数和操作参数由隧道掘进机自带的监控系统每隔预设时间(如5s)或预设距离(如20mm)进行采集,同时,采集工程沿线的地质类型,得到地质标签。
52.本发明中对于预设时间或者预设距离的设置不做限制,示例性的,预设时间可以为5秒,预设距离可以为20毫米,具体地可以根据实际情况进行设置。
53.进一步地,将获取的隧道掘进机的操作参数与对应位置的地质标签的组合作为特征样本点集,将样本点对应的隧道掘进机的掘进速度和刀盘转矩作为标签,从所有样本中采集一定比例的样本点作为训练集,将其他样本点作为测试集,其中训练集用于训练随机森林算法,得到掘进速度预测模型和刀盘转矩预测模型,测试集用于检验掘进速度预测模型和刀盘转矩预测模型的有效性。
54.本发明中对于从所有样本中选取出训练集的方式不做限制,示例性的,选取样本
的70%的样本点作为训练集。
55.优选地,对样本点组成的数据集进行数据预处理,根据隧道掘进机的运行参数中的“运行状态”参数,选择隧道掘进机处于“掘进”状态的运行样本点,去掉隧道掘进机处于“待机”、“停机”状态的运行样本点。
56.更进一步地,将训练集数据输入到随机森林模型(random forest,rf)中,分别建立地质类型、操作参数与掘进速度的掘进速度预测模型和地质类型、操作参数与刀盘转矩的刀盘转矩预测模型,并用测试集数据验证映射关系模型的有效性。
57.具体地,随机森林预测模型的输入参数包括但不限于刀盘转速、总推力、土仓压力、螺旋机转速和地质类型标签编号。
58.示例性的,图2为本发明的掘进速度预测模型的效果示意图,如图2所示,横轴为样本序号,纵轴为推进速度,即掘进速度,单位为毫米每分钟(mm﹒min-1),实线表示真实值,虚线表示预测值;图3为本发明的刀盘转矩预测模型的效果示意图,如图3所示,横轴为样本序号,纵轴为刀盘转矩,单位为牛顿﹒米(kn﹒m),实线表示真实值,虚线表示预测值;从图2和图3中,可以得到对四种地质类型下的隧道掘进机掘进速度和刀盘转矩的预测的平均绝对百分比误差达到0.061与0.071。
59.步骤2:根据映射关系模型,得到隧道掘进机的掘进速度优化方程。
60.优选地,步骤2,包括:步骤201:根据映射关系模型,构建以最大掘进速度为目标,以操作参数为控制变量的掘进速度优化方程。
61.其中,操作参数包括以下至少一种:刀盘转速、螺旋输送机转速、总推力和土仓压力。
62.具体地,结合得到的映射关系模型,构建以隧道掘进机的掘进速度为最大掘进速度为目标,以隧道掘进机的操作参数为控制变量的优化方程,其中操作参数包括但不限于:刀盘转速、螺旋输送机转速、总推力和土仓压力。
63.本发明中需要为控制变量的寻优范围设置约束边界,约束边界包括但不限于刀盘转速、总推力和螺旋机转速额定值约束;根据地层的不同地质类型,对土仓压力设置不同的约束范围;建立刀盘转矩额定值约束,结合刀盘转矩预测模型,求解操作参数的约束范围。
64.步骤3:根据粒子群算法,得到优化方程对应的操作参数决策结果。
65.具体地,利用粒子群算法(particle swarm optimization,pso)求解优化方程,得到各地质类型地层中的最优的操作参数决策结果。
66.示例性的,本发明提供的四种典型地质类型地层中的粒子群算法寻优过程的适应度值变化趋势示意图,图4a为本发明的在福康宁卵石的地质类型中的粒子群算法寻优过程中的适应度值的变化趋势示意图;图4b为本发明的在句容地层iv的地质类型中的粒子群算法寻优过程中的适应度值的变化趋势示意图;图4c为本发明的在句容地层v的地质类型中的粒子群算法寻优过程中的适应度值的变化趋势示意图;图4d为本发明的在海洋黏土的地质类型中的粒子群算法寻优过程中的适应度值的变化趋势示意图,如图4a-图4d所示,横轴为迭代次数,单位为次,纵轴为适应度值(fitness),为无量纲值,如图4a-图4d所示,粒子群算法求解得到的最优操作参数组合,使得本工程段四种典型地质类型地层中的隧道掘进机掘进速度分别提升67.2%、41.8%、53.6%、15.0%。
67.步骤4:根据操作参数决策结果设置隧道掘进机的操作参数。
68.具体地,以隧道掘进机掘进效率、能耗、成本等性能指标提升为目标,构建参数映射模型和优化模型的决策方法成为操作参数决策的新方向。基于操作参数的映射关系模型和优化模型的操作参数决策方法能够更好的揭示操作参数与优化目标之间的联系,并且可以根据特定优化目标,建立专门的优化方程,得出专门的参数决策结果。隧道掘进机的主要运行参数主要有刀盘转速、刀盘扭矩、总推力、掘进速度、螺旋机转速和土仓压力。其中,掘进速度决定了施工快慢,是影响施工成本最重要的因素。因此隧道掘进机掘进速度更适合作为掘进性能评价指标。
69.本发明首先利用随机森林算法分别建立了地质类型、操作参数与掘进速度和地质类型、操作参数与刀盘转矩的地层自适应映射关系模型。然后构建了以隧道掘进机的掘进速度的最大掘进速度为目标,以刀盘转速、螺旋输送机转速、总推力和土仓压力四个操作参数为控制变量的优化方程。同时,根据刀盘转矩预测模型和隧道掘进机各参数额定值,得到参数优化可行域。最后,利用粒子群算法求解各地质类型地层中的最优操作参数决策结果。
70.本发明还提供了一种隧道掘进机操作参数地层自适应决策系统,包括:
71.模块m1:用于根据隧道掘进机的运行参数建立映射关系模型。
72.其中,映射关系模型包括掘进速度预测模型和刀盘转矩预测模型。
73.优选地,模块m1包括:子模块m101:用于从运行参数中提取与隧道掘进机的掘进速度和刀盘转矩相关的操作参数,以及确定与操作参数对应的地质标签;子模块m102:用于根据操作参数和地质标签,确定对应的掘进速度和刀盘转矩;子模块m103:用于将操作参数、地质标签和掘进速度输入随机森林模型,得到掘进速度预测模型;子模块m104:用于将操作参数、地质标签和刀盘转矩输入随机森林模型,得到刀盘转矩预测模型。
74.模块m2:用于根据映射关系模型,得到隧道掘进机的掘进速度优化方程。
75.优选地,模块m2,包括:子模块m201:用于根据映射关系模型,构建以最大掘进速度为目标,以操作参数为控制变量的掘进速度优化方程。
76.其中,操作参数包括以下至少一种:刀盘转速、螺旋输送机转速、总推力和土仓压力。
77.模块m3:用于根据粒子群算法,得到优化方程对应的操作参数决策结果。
78.模块m4:用于根据操作参数决策结果设置隧道掘进机的操作参数。
79.与现有技术相比,本发明具有如下的有益效果:
80.1、本发明进行操作参数决策时无需依赖人为经验,仅需利用隧道掘进机自带的状态监测与传感器系统获取的运行参数即可实现操作参数决策。
81.2、本发明基于映射关系模型和优化模型的操作参数决策方法能够更好的揭示操作参数与优化目标之间的联系,并且可以根据特定优化目标,建立专门的优化方程,得出专门的参数决策结果。
82.3、本发明考虑了隧道掘进机在不同地质类型的地层中掘进时操作参数值的差异,将地质类型作为随机森林掘进速度预测模型和刀盘转矩预测模型的输入参数,提升了决策方法在不同地质类型下的准确性。
83.本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微
控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
84.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1