一种实现空间立体错车的液压锚杆钻车的制作方法
1.本发明涉及液压锚杆钻车技术领域,具体涉及一种实现空间立体错车的液压锚杆钻车。
背景技术:
2.在我国煤矿生产中,掘进技术装备相对滞后采煤造成掘跟不上采的现象,而影响快速掘进的掘、支、运三个环节中,掘和运的发展很快,支护却成了快速掘进的短板。目前煤矿巷道支护作业仍主要是采用单体锚杆机、履带式液压钻车作业方式,单体锚杆机劳动强度大、安全性差、效率低;履带式液压钻车平行错车要求巷道加宽、支护作业施工繁琐;为此我们提供一种实现空间立体错车的液压锚杆钻车解决上述问题。
技术实现要素:
3.针对上述现有技术存在的问题,本发明提供了一种实现空间立体错车的液压锚杆钻车,该钻车采用“扁平化”设计,在轨道移动时主框架上临时支护总成、伸缩臂、自动锚杆钻机、操作平台、支撑装置全部收缩,因高度低,占用巷道空间很小,可与掘进实现空间立体错车,解决了现有设备错车难问题。
4.为了实现上述目的,本发明采用的一种实现空间立体错车的液压锚杆钻车,包括:
5.设置于主框架上的临时支护总成,主框架还设置有伸缩臂,主框架的后侧设置有驱动部,所述驱动部、主框架均滑动设置于轨道上,所述主框架的前侧设置有自动锚杆钻机;
6.所述伸缩臂包括底座、十字轴座、摆动座、筒体组件、变幅油缸、调平支架、调平油缸、动力托架、旋转油缸i、旋转油缸ii、操作平台、旋转油缸iii,所述底座安装在主框架的中部框架前端两侧,所述十字轴座和两件摆动座分别安装在底座上,所述筒体组件尾端与十字轴座采用销轴连接,两件变幅油缸一端分别与摆动座连接,另一端分别与筒体组件上油缸座连接,筒体组件的底部固定设置有底部连接座。
7.作为上述方案的进一步优化,所述临时支护总成包括摆动式连杆机构、伸缩油缸iii、主梁、调整座、伸缩梁、主托架、边托架、旋转油缸、迎脸支护,所述摆动式连杆机构的连接座i与主框架上前框架前端连接,通过伸缩油缸iii实现摆动式连杆机构上下位移。
8.作为上述方案的进一步优化,所述主梁与连接座ii焊接,所述调整座的底部焊接在主梁上,所述伸缩梁通过销轴铰接安装在调整座上,在弹性元件的作用下可保持平衡或与巷道倾斜顶部随形,连接座i和连接座ii之间连接有支撑框架。
9.作为上述方案的进一步优化,所述主托架设置在伸缩梁上固定梁的两侧,所述边托架安装在伸缩梁中移动梁的外端,在伸缩梁中油缸的作用下分别控制移动梁相对固定梁的伸缩量,进而分别控制边托架之间和相对主梁之间的尺寸和位置,以适应不同巷道宽度相对巷道中线不同定位尺寸的工况要求,所述迎脸支护通过旋转油缸安装在主托架前端,相对主托架旋转一个角度实现与巷道迎脸贴合的支护要求。
10.作为上述方案的进一步优化,所述筒体组件在两件变幅油缸之间配合作用下实现筒体组件上下、左右摆动,即当两件变幅油缸同时伸长或缩短时,筒体组件上或下摆动,两件变幅油缸一个伸长另一个缩短时,筒体组件向左或向右摆动。
11.作为上述方案的进一步优化,所述筒体组件包括外筒体、伸缩油缸、内筒体,所述伸缩油缸和内筒体置于外筒体内部,伸缩油缸一端与外筒体底部铰接,另一端与内筒体前端铰接,在伸缩油缸作用下,内筒体相对外筒体伸出或缩回,进而带动安装在伸缩臂前部的自动锚杆钻机前进或后退,所述调平支架安装在所述筒体组件的内筒体上,所述动力托架铰接安装在调平支架的前端,所述调平油缸的两端分别与调平支架和动力托架相连,用以补偿伸缩臂上下摆动所引起的角度变化,所述动力托架前部安装旋转油缸i,底部安装旋转油缸iii,旋转油缸i前部安装旋转油缸ii,所述旋转油缸iii轴向安装操作平台。
12.作为上述方案的进一步优化,所述操作平台包括摆动连接座、连接轴、工作平台、扶手架、转动扶手,所述摆动连接座通过旋转油缸iii连接在动力托架底部,所述连接轴固定连接在摆动连接座的底部,所述工作平台通过轴承安装在连接轴上并围绕其旋转,转到利于操作自动锚杆钻机所需位置后通过锁紧机构锁紧,在旋转油缸iii作用下保持工作平台与地面平行,所述扶手架和转动扶手安装在工作平台上,使用时可翻转拉开,也可以折叠起来以减小钻车运行时的高度尺寸。
13.作为上述方案的进一步优化,所述驱动部包括驱动轮、制动装置,两个驱动轮竖向对称设置且分别与轨道两侧的轨道槽滚动接触,两个驱动轮分别由设在底部连接的液压马达驱动其转动,两个液压马达的安装座分别与加载油缸两端铰接,通过调整加载油缸压力进而调整两个驱动轮与轨道的轨道槽之间压力,即摩擦力的大小。
14.作为上述方案的进一步优化,所述制动装置包括框架、制动块、制动杆、连杆i、连杆ii、弹簧、制动油缸,驱动部上的制动装置为常闭状态,在所述弹簧弹力作用下,分设在所述框架两边的连杆i和连杆ii围绕设置在框架上的铰接轴转动,推动与连杆铰接的制动杆移动,使连接在制动杆上的制动块压紧在轨道的轨道槽上进行制动,连杆ii通过销轴一与制动杆的一端连接。
15.作为上述方案的进一步优化,所述驱动部行走时,所述制动油缸拉紧弹簧,上述过程反向作用,使制动块松开。
16.本发明的一种实现空间立体错车的液压锚杆钻车,具备如下有益效果:
17.1.本发明的一种实现空间立体错车的液压锚杆钻车,该钻车采用“扁平化”设计,在轨道移动时主框架上临时支护总成、伸缩臂、自动锚杆钻机、操作平台、支撑装置全部收缩,因高度低,占用巷道空间很小,可与掘进实现空间立体错车,解决了现有设备错车难问题;
18.2.本发明的一种实现空间立体错车的液压锚杆钻车,在工作状态时,临时支护总成下移的同时后退,便于保障放置钢带和锚网时的安全,临时支护将锚网送至巷道顶部时,迎脸支护放下,护住巷道顶部和迎头,实现无空顶作业,支护更加安全便捷;
19.3.本发明的一种实现空间立体错车的液压锚杆钻车,将主框架上支撑装置放下,下部撑住地面,上部撑住巷道顶,保证整机工作时稳定可靠;
20.4.本发明的一种实现空间立体错车的液压锚杆钻车,充分利用煤矿已广泛使用的单轨吊运输系统的悬挂轨道,将钻车通过悬挂行走轮装置悬挂在轨道上,在自带驱动装置
的牵引下,沿轨道单轨吊轨道系统灵活移动,由于本钻车是集机械、液压、自动控制及遥控为一体的智能化装备,与现有掘进机及配套设备可组成煤矿巷道快速掘进成套机组,开创了一种新型快速掘进的工法,以适应巷道快速掘进需求。
21.参照后文的说明与附图,详细公开了本发明的特定实施方式,指明了本发明的原理可以被采用的方式,应该理解,本发明的实施方式在范围上并不因而受到限制,在所附权利要求的精神和条款的范围内,本发明的实施方式包括许多改变、修改和等同。
附图说明
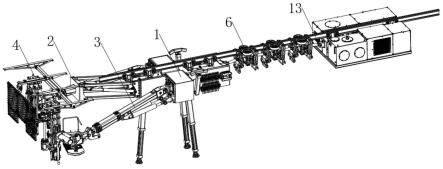
22.图1为本发明的结构示意图;
23.图2为本发明的临时支护总成结构示意图;
24.图3为本发明的连接座ii结构示意图;
25.图4为本发明的整体结构收缩时示意图;
26.图5为本发明的驱动轮结构示意图;
27.图6为本发明的制动装置结构示意图;
28.图7为本发明的伸缩臂结构示意图;
29.图8为本发明的伸缩臂剖视图;
30.图9为本发明的工作平台结构示意图;
31.图10为本发明的工作平台正视图;
32.图11为本发明的主框架结构示意图;
33.图12为本发明的弹簧结构示意图。
34.图中:主框架1、前框架101、中部框架102、临时支护总成2、摆动式连杆机构200、连接座i201、支撑框架202、伸缩油缸iii203、连接座ii204、主梁205、调整座206、固定梁207、主托架208、边托架209、旋转油缸210、迎脸支护211、移动梁212、销轴213、弹性元件214、伸缩梁215、轨道13、伸缩臂3、底座301、十字轴座302、摆动座303、筒体组件304、变幅油缸305、调平支架306、调平油缸307、动力托架308、旋转油缸i309、旋转油缸ii310、操作平台311、底部连接座312、外筒体313、伸缩油缸314、内筒体315、旋转油缸iii316、连接座317、工作平台318、连接轴319、扶手架320、转动扶手321、锁紧机构322、自动锚杆钻机4、驱动部6、驱动轮601、液压马达602、安装座603、加载油缸604、连杆i605、框架606、制动块607、制动杆608、连杆ii609、销轴一610、弹簧611、制动油缸612、制动装置613。
具体实施方式
35.为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图中及实施例,对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
36.需要说明的是,当元件被称为“设置于、设有”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件,当一个元件被认为是“连接、相连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件,“固连”为固定连接的含义,固定连接的方式有很多种,不作为本文的保护范围,本文中所使用的术语“垂直的”“水平的”“左”“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
37.除非另有定义,本文所使用的所有技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在限制本发明,本文中所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合;
38.请参阅说明书附图1-12,本发明提供一种技术方案:一种实现空间立体错车的液压锚杆钻车,包括:
39.设置于主框架1上的临时支护总成2,主框架1还设置有伸缩臂3,主框架1的后侧设置有驱动部6,驱动部6、主框架1均滑动设置于轨道13上,主框架1的前侧设置有自动锚杆钻机4;
40.伸缩臂3包括底座301、十字轴座302、摆动座303、筒体组件304、变幅油缸305、调平支架306、调平油缸307、动力托架308、旋转油缸i309、旋转油缸ii310、操作平台311、旋转油缸iii316,底座301安装在主框架1的中部框架102前端两侧,十字轴座302和两件摆动座303分别安装在底座301上,筒体组件304尾端与十字轴座302采用销轴连接,两件变幅油缸305一端分别与摆动座303连接,另一端分别与筒体组件304上油缸座连接,筒体组件304的底部固定设置有底部连接座312。
41.本实施例中,临时支护总成2包括摆动式连杆机构204、伸缩油缸ⅲ203、主梁205、调整座206、伸缩梁215、主托架208、边托架209、旋转油缸210、迎脸支护211等。摆动式连杆机构204的连接座201与主框架1上的前框架101的前端连接,通过伸缩油缸ⅲ203实现摆动式连杆机构204上下位移(平移)。主梁205与摆动式连杆机构204前端连接座焊接,调整座206的底部焊接在主梁上,伸缩梁215通过销轴213铰接安装在调整座206上,在弹性元件214的作用下可保持伸缩梁215平衡或与巷道倾斜顶部随形,连接座i201和连接座ii204之间连接有支撑框架202。主托架208连接在伸缩梁215的固定梁207两侧,边托架209安装在伸缩梁215中的移动梁212外端,在伸缩梁215中油缸的作用下可分别控制移动梁212的伸缩量,进而控制边托架之间的尺寸和相对主梁205位置,以适应工况的要求。迎脸支护211通过旋转油缸210安装在主托架208前端,相对主托架208旋转一个角度实现巷道迎脸支护的要求。
42.该钻车采用“扁平化”设计,在轨道移动时主框架上临时支护总成、伸缩臂、自动锚杆钻机、操作平台、支撑装置全部收缩,因高度低,占用巷道空间很小,可与掘进实现空间立体错车,解决了现有设备错车难问题。
43.筒体组件304在两件变幅油缸305之间配合作用下实现筒体组件304上下、左右摆动,即当两件变幅油缸305同时伸长或缩短时,筒体组件304上或下摆动,两件变幅油缸305一个伸长另一个缩短时,筒体组件304向左或向右摆动。
44.在工作状态时,临时支护总成下移的同时后退,便于保障放置钢带和锚网时的安全,临时支护将锚网送至巷道顶部时,迎脸支护放下,护住巷道顶部和迎头,实现无空顶作业,支护更加安全便捷。
45.筒体组件304包括外筒体313、伸缩油缸314、内筒体315,伸缩油缸314和内筒体315置于外筒体313内部,伸缩油缸314一端与外筒体313底部铰接,另一端与内筒体315前端铰接,在伸缩油缸314作用下,内筒体315相对外筒体313伸出或缩回,进而带动安装在伸缩臂3前部的自动锚杆钻机4前进或后退,调平支架306安装在筒体组件304的内筒体上,动力托架308铰接安装在调平支架306的前端,调平油缸307的两端分别与调平支架306和动力托架
308相连,用以补偿伸缩臂3上下摆动所引起的角度变化,动力托架308前部安装旋转油缸i309,底部安装旋转油缸iii316,旋转油缸i309前部安装旋转油缸ii310,旋转油缸iii306轴向安装操作平台311。
46.将主框架上支撑装置放下,下部撑住地面,上部撑住巷道顶,保证整机工作时稳定可靠。
47.操作平台311包括摆动连接座317、连接轴319、工作平台318、扶手架320、转动扶手321,摆动连接座317通过旋转油缸iii316连接在动力托架308底部,连接轴319固定连接在摆动连接座317的底部,工作平台318通过轴承安装在连接轴319上并围绕其旋转,转到利于操作自动锚杆钻机4所需位置后通过锁紧机构322锁紧,在旋转油缸iii316作用下保持工作平台318与地面平行,扶手架320和转动扶手321安装在工作平台318上,使用时可翻转拉开,也可以折叠起来以减小钻车运行时的高度尺寸。
48.充分利用煤矿已广泛使用的单轨吊运输系统的悬挂轨道,将钻车通过悬挂行走轮装置悬挂在轨道上,在自带驱动装置的牵引下,沿轨道单轨吊轨道系统灵活移动,由于本钻车是集机械、液压、自动控制及遥控为一体的智能化装备,与现有掘进机及配套设备可组成煤矿巷道快速掘进成套机组,开创了一种新型快速掘进的工法,以适应巷道快速掘进需求。
49.驱动部6包括驱动轮601、制动装置613,两个驱动轮601竖向对称设置且分别与轨道13两侧的轨道槽滚动接触,两个驱动轮601分别由设在底部连接的液压马达602驱动其转动,两个液压马达602的安装座603分别与加载油缸604两端铰接,通过调整加载油缸604压力进而调整两个驱动轮601与轨道13的轨道槽之间压力,即摩擦力的大小。
50.制动装置613包括框架606、制动块607、制动杆608、连杆i605、连杆ii609、弹簧611、制动油缸612,驱动部6上的制动装置613为常闭状态,在弹簧611弹力作用下,分设在框架606两边的连杆i605和连杆ii609围绕设置在框架606上的铰接轴转动,推动与连杆铰接的制动杆608移动,使连接在制动杆608上的制动块607压紧在轨道13的轨道槽上进行制动,连杆ii609通过销轴一610与制动杆608的一端连接。
51.驱动部6行走时,制动油缸612拉紧弹簧611,上述过程反向作用,使制动块607松开。
52.本实施方式提供的一种实现空间立体错车的液压锚杆钻车,工作过程如下:
53.该钻车采用“扁平化”设计,在轨道移动时主框架上临时支护总成、伸缩臂、自动锚杆钻机、操作平台、支撑装置全部收缩,因高度低,占用巷道空间很小,可与掘进实现空间立体错车,解决了现有设备错车难问题,在工作状态时,临时支护总成下移的同时后退,便于保障放置钢带和锚网时的安全,临时支护将锚网送至巷道顶部时,迎脸支护放下,护住巷道顶部和迎头,实现无空顶作业,支护更加安全便捷,将主框架上支撑装置放下,下部撑住地面,上部撑住巷道顶,保证整机工作时稳定可靠,充分利用煤矿已广泛使用的单轨吊运输系统的悬挂轨道,将钻车通过悬挂行走轮装置悬挂在轨道上,在自带驱动装置的牵引下,沿轨道单轨吊轨道系统灵活移动,由于本钻车是集机械、液压、自动控制及遥控为一体的智能化装备,与现有掘进机及配套设备可组成煤矿巷道快速掘进成套机组,开创了一种新型快速掘进的工法,以适应巷道快速掘进需求。
54.仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1