基于新奥法的机械开挖结合钻爆法的施工方法与流程
1.本技术涉及隧道施工的领域,尤其是涉及一种基于新奥法的机械开挖结合钻爆法的施工方法。
背景技术:
2.隧道施工方法主要包括:明挖法、盖挖法、新奥法、盾构法、沉埋法等。
3.其中新奥法具有如下特点,一、用柔性支护手段(锚杆、混凝土喷射)及时支护、封闭,使得围岩成为支护体系的重要组成部分,以发挥围岩自承载能力;二、开挖作业时减少对围岩的扰动;三、通过施工过程中对围岩和支护进行量测,根据反馈信息,以指导隧道的设计与施工。
4.现有的基于新奥法的机械开挖结合钻爆法的施工步骤为:s1:钻眼装药并爆破、s2:除尘通风、s3:机械开挖并将石渣运出洞外、s4:设置柔性支护、s5:量测、判断围岩和柔性支护的形变、s6:重复s1-s5,以对下一段隧道断面进行施工。
5.在步骤s2中,为了便于后续的机械开挖和支护搭设,在钻爆之后,势必要进行除尘,具体为,利用风管和吸风机,风管搭设于掌子面附近,利用抽吸的方式,以将隧道内的爆破粉尘进行吸除,但是为了减少风管被爆破碎石所破坏,风管往往设置得离掌子面较远,而风管的抽吸范围较小,因此除尘效果较差,尤其是爆破松散岩体时,爆破粉尘更多,而现有的除尘方式的局限性更大。
技术实现要素:
6.为了有效清除爆破粉尘,以利于后续的机械开挖,本技术提供一种基于新奥法的机械开挖结合钻爆法的施工方法。
7.本技术提供的一种基于新奥法的机械开挖结合钻爆法的施工方法,采用如下的技术方案:一种基于新奥法的机械开挖结合钻爆法的施工方法,包括以下步骤:s1、对掌子面进行钻爆;s2、除尘通风:通过除尘装置,除尘装置包括通风管、吸风管和粉尘捕捉机构,其中通风管的出口朝向掌子面设置,吸风管的吸风端位于通风管的出口的远离掌子面的一侧,粉尘捕捉机构设置于吸风管的吸风端处;通风管朝向掌子面吹风,爆破粉尘则向远离掌子面方向回流,而后方的粉尘捕捉机构则对该涌来的粉尘进行捕捉,并通过吸风管将捕捉后的粉尘输送至隧道外部;s3、机械开挖:通过挖掘机扒渣,装载机装渣,自卸车运石渣至隧道外部;s4、支护施工。
8.通过采用上述技术方案,除尘装置使用时,先利用通风管的吹风,利用掌子面的阻挡,使得空气沿远离掌子面方向回流,即使得空气中的灰尘也一并移动,然后利用粉尘捕捉机构,以极大限度地捕捉所回流的粉尘,从而有效减少隧道内的粉尘,减少粉尘残留,以便
于后续机械开挖的施工开展。
9.可选的,在步骤s1时,钻爆之前,进行超前支护的施工。
10.通过采用上述技术方案,以对隧道外层围岩进行加固,从而减少爆破时对围岩的扰动,一定程度上提高后续支护施工的稳定性。
11.可选的,在步骤s1时,钻爆之前,对施工隧道的实时状况进行超前地质预报。
12.通过采用上述技术方案,以便于后续施工参数的确定。
13.可选的,所述通风管的出口设有伸缩气管和用于带动伸缩气管朝向掌子面伸展的伸缩驱动结构,其中伸缩气管的出口倾斜朝向掌子面的上部设置。
14.通过采用上述技术方案,通过伸缩气管,以更加靠近掌子面,从而使得通风管的吹风对掌子面附近的粉尘的吹动效果最大化,以加强回流效果。
15.可选的,所述粉尘捕捉机构包括摆动驱动组件、三个条形捕捉袋,所述吸风管的端部同轴固定有固定轴,捕捉袋的长度方向以所述固定轴的径向设置,所述捕捉袋的一端与所述固定轴绕固定轴的轴线转动连接,捕捉袋的表面开设有条形孔,所述捕捉袋的内腔与所述吸风管之间通过第一柔性气管连通,所述摆动驱动组件用于带动所述捕捉袋绕固定轴进行竖直圆周摆动,且相邻捕捉袋之间于竖直圆周面内具有夹角;在步骤s1时,未爆破之前,摆动驱动组件启动,以带动捕捉袋摆动。
16.通过采用上述技术方案,使用时,吸风管吸风,从而将粉尘依次从条形孔、捕捉袋内腔、第一柔性气管,吸入至吸风管内,以完成除尘,如此一来,通过往复摆动的方式,能够最大限度对回流的粉尘进行封堵,以便于捕捉的完全性,二来,多个捕捉袋的摆动轨迹是错开的,因此,封堵效果更好,即粉尘较难逃逸。
17.可选的,所述捕捉袋的横截面呈长方形,所述捕捉袋的宽侧面设有所述条形孔;所述固定轴上转动套设有转动环,所述转动环的外周面沿自身径向设有转杆,所述捕捉袋的上端固定有转套,所述转套转动套设于所述转杆上;在步骤s1时,所述捕捉袋在往复摆动的过程中,摆动驱动组件还驱动所述捕捉袋的带有条形孔的宽侧面始终朝向掌子面,且捕捉袋的带有条形孔的宽侧面与掌子面之间具有夹角。
18.通过采用上述技术方案,捕捉袋在往复摆动时,摆动驱动组件还会带动捕捉袋绕转杆进行转动以调整位置,从而实现,捕捉袋在往复摆动的过程中,捕捉袋的带有条形孔的宽侧面始终朝向掌子面,即条形孔正对回流的灰尘,捕捉效果更佳,同时,由于捕捉袋的带有条形孔的宽侧面与掌子面之间始终具有夹角,因此捕捉袋的摆动过程中对回流的粉尘也具有扰动作用,该扰动作用则迫使粉尘朝向掌子面方向移动,如此一来,能够阻碍粉尘的逃逸动作,以有效限制粉尘,以便于粉尘的捕捉。
19.可选的,所述摆动驱动组件包括驱动电机、一一对应所述捕捉袋设置的第一齿轮,其中第一齿轮同轴转动设置于所述固定轴上,所述驱动电机安装于固定轴上,驱动电机的输出轴设有与第一齿轮啮合的第二齿轮;所述第一齿轮固定有第一摆杆,第一摆杆的长度方向沿固定轴的径向设置,所述转套的外表面沿自身径向固定有第二摆杆,所述第二摆杆位于所述第一摆杆的转动轨迹上,转套与转杆之间设有扭簧,扭簧用于迫使所述转套转动至捕捉袋的带有条形孔的宽侧面朝向掌子面。
20.通过采用上述技术方案,使用时,驱动电机始终正向转动,从而带动第一摆杆始终反向转动,而通过第一摆杆与第二摆杆之间的碰撞干涉,以带动捕捉袋反向摆动一定角度,
期间扭簧形变,捕捉袋绕转杆进行转动以调整位置至捕捉袋的带有条形孔的宽侧面朝向掌子面,当第一摆杆反向转动至一定位置时,第二摆杆位置变化而离第一摆杆,第一摆杆继续反向转动,而捕捉袋失去第一摆杆的动力之后,捕捉袋受重力而正向摆动至初始位置,同时,扭簧释放弹性势能,以带动捕捉袋绕转杆转动复位,从而使得捕捉袋在正向摆动的过程中,其上的条形孔也朝向掌子面。
21.可选的,所述捕捉袋为柔性囊体结构,所述除尘装置还包括充气结构,充气结构用于往柔性囊体结构内充气,以确保捕捉袋的膨胀形态,且捕捉袋的下端设有配重板。
22.通过采用上述技术方案,通过充气结构的充气,使得捕捉袋膨胀伸展,以提高对粉尘的捕捉范围,同时柔性囊体结构为柔性,能够减少石渣对捕捉袋造成的损伤,而配置板的设置在于能够确保捕捉袋能够稳定受重力而快速摆动复位。
23.可选的,所述除尘装置还包括抽气结构,抽气结构用于将柔性囊体结构内的填充空气抽走,且使柔性囊体结构干瘪。
24.通过采用上述技术方案,当捕捉完毕后,通过抽气结构,以抽走柔性囊体结构内的空气,使柔性囊体结构干瘪,从而减少柔性囊体结构的体积,以便于后续的机械开挖设备的进场。
25.可选的,所述捕捉袋的外表面的背离掌子面的一侧贴有反光条,在步骤s1时,擦拭反光条后才能进行捕捉袋的摆动。
26.通过采用上述技术方案,灰尘会落在反光条上,因此通过观察反光条的反光效果,能够快速了解隧道内的灰尘密度,从而便于后续机械开挖设备进场的时机把握。
27.综上所述,本技术包括以下至少一种有益技术效果:1.通过除尘装置,利用吹风和吸风相结合的方式,以对爆破粉尘进行引导,同时利用粉尘捕捉机构,以有效捕捉所集中引导的粉尘,从而有效减少隧道内的粉尘,以便于后续机械开挖的施工开展;2.通过设置捕捉袋,通过往复摆动的方式,能够最大限度对回流的粉尘进行封堵,以便于捕捉的完全性,并且多个捕捉袋的摆动轨迹是错开的,因此,封堵效果更好,即粉尘较难逃逸。
附图说明
28.图1是实施例1的除尘装置的结构示意图。
29.图2是图1中a处的局部放大图。
30.图3是图1中b处的局部放大图。
31.图4是实施例1的用于体现捕捉袋与固定轴的连接关系的局部示意图。
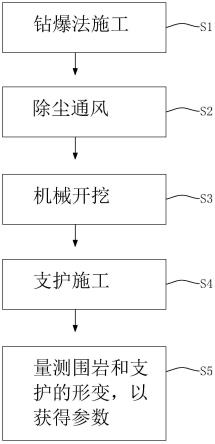
32.图5是实施例1的施工方法的流程框图。
33.图6是实施例1的用于体现捕捉袋在正向和反向摆动过程中的位置变化的示意图。
34.图7是实施例2的柔性囊体结构的剖视图。
35.附图标记说明:1、通风管;2、吸风管;3、粉尘捕捉机构;10、支架;11、正压风机;12、伸缩气管;13、伸缩驱动结构;21、负压风机;23、固定轴;31、捕捉袋;311、条形孔;312、转套;313、第二摆杆;321、驱动电机;322、连接杆;323、第二齿轮;324、第一齿轮;325、转动环;326、转杆;327、扭簧;328、第一摆杆;33、第一柔性气管;34、配重板。
具体实施方式
36.以下结合附图1-7对本技术作进一步详细说明。
37.本技术实施例1公开一种除尘装置。
38.如图1所示,除尘装置包括支架10、通风管1、吸风管2和粉尘捕捉机构3,其中支架10架设于隧道内,支架10可以为支撑式架体且具有自锁脚轮的结构,支架10也可以安装于隧道内顶面的悬吊式架体,通风管1和吸风管2均架设于支架10上。
39.如图1、图2所示,通风管1位于隧道内部的上方位置,通风管1沿隧道长度方向延伸,通风管1的入口位于隧道外部,且通风管1的入口设有正压风机11以引入外部的清净空气进入隧道内,通风管1的出口设有伸缩气管12和伸缩驱动结构13,其中伸缩气管12的出口倾斜朝向掌子面的上部设置,伸缩驱动结构13用于带动伸缩气管12朝向掌子面伸展,从而使得通风管1的吹风能够较为快速抵达掌子面,以迫使掌子面附近的掺杂爆破粉尘的空气沿远离掌子面方向回流,具体为,伸缩驱动结构13包括电动推杆,电动推杆的主体固定于通风管1的出口,电动推杆的伸缩端与伸缩气管12的远离通风管1的一端固定连接,从而实现伸缩气管12的伸缩控制。
40.如图1、图3所示,吸风管2位于通风管1的正下方,吸风管2沿隧道长度方向延伸,吸风管2的吸风端位于通风管1的出口的远离掌子面的一侧,吸风管2的另一端位于隧道外部,且该端设有除尘袋(图中未示出)和负压风机21,即将回流的掺杂爆破粉尘的空气通过吸风管2进行吸入,然后通过除尘袋进行粉尘的收集;同时,粉尘捕捉机构3设置于吸风管2的吸风端,当爆破粉尘向远离掌子面方向回流,此时粉尘捕捉机构3对该尘进行捕捉,然后通过吸风管2将捕捉后的粉尘输送至除尘袋并收集。
41.如图3、图4所示,吸风管2的端部封闭,且该端同轴固定有固定轴23,粉尘捕捉机构3包括摆动驱动组件、三个条形捕捉袋31,捕捉袋31为麻袋浸润柏油而硬化所制成的,捕捉袋31的横截面呈长方形,捕捉袋31的宽侧面设有沿自身长度方向设置的条形孔311,捕捉袋31的外表面的背离掌子面的一侧贴有反光条(图中未标出),捕捉袋31的长度方向以固定轴23的径向设置,捕捉袋31的上端固定有转套312,转套312的外周面固定有第二摆杆313,第二摆杆313沿转套312的径向设置。
42.固定轴23上转动套设有多个转动环325,转动环325与捕捉袋31一一对应设置,各转动环325沿固定轴23长度方向间隔排布设置,转动坏的外周面固定有转杆326,转杆326沿转动环325的径向设置,转套312转动套设于转杆326外侧,并且,转套312与转杆326之间设有扭簧327,扭簧327用于迫使转套312转动以使得捕捉袋31的带有条形孔311的宽侧面朝向掌子面,且捕捉袋31的带有条形孔311的宽侧面与掌子面之间具有夹角;同时,捕捉袋31的内腔与吸风管2之间通过第一柔性气管33连通。
43.如图1所示,摆动驱动组件用于带动捕捉袋31分别绕固定轴23进行竖直圆周面内的往复摆动,期间,相邻捕捉袋31之间于竖直圆周面内具有夹角,同时,摆动驱动组件还驱动捕捉袋31的带有条形孔311的宽侧面始终朝向掌子面。
44.具体为,如图4所示,摆动驱动组件包括驱动电机321、第一齿轮324和第二齿轮323,其中驱动电机321固定安装于固定轴23上,驱动电机321的输出轴与固定轴23相平行,驱动电机321的输出轴同轴固定有连接杆322,各第二齿轮323间隔固定于连接杆322上,第一齿轮324同轴转动设置于固定轴23上,各第一齿轮324沿固定轴23长度方向间隔排布,第
一齿轮324与第二齿轮323相啮合,且第一齿轮324固定有第一摆杆328,第一摆杆328的长度方向沿固定轴23的径向设置,第一摆杆328移动时将与第二摆杆313相干涉。
45.本技术实施例1还公开一种基于新奥法的机械开挖结合钻爆法的施工方法。
46.如图5所示,基于新奥法的机械开挖结合钻爆法的施工方法包括以下步骤:s1、钻爆法施工,包括以下步骤:s1.1、对待施工隧道的实时状况进行超前地质预报,并测量放线。
47.s1.2、进行超前支护的施工,以减少钻爆时对隧道外层围岩的扰动。
48.s1.3、采用全电脑三臂凿岩台车,在掌子面上进行孔位定位、钻孔、洗孔和验孔后,再在孔内装药爆破,在爆破之前,先擦拭反光条,然后摆动驱动组件启动,以带动捕捉袋31摆动,具体为,如图6所示,驱动电机321正向转动,从而带动第一摆杆328始终反向转动,第一摆杆328反向转动过程中与第二摆杆313发生碰撞干涉,先是带动捕捉袋31绕转杆326进行转动以调整自身位置至捕捉袋31的带有条形孔311的宽侧面朝向掌子面(期间扭簧327积蓄弹性势能),同时也带动捕捉袋31反向摆动一定角度,当第一摆杆328反向转动至一定位置时,因捕捉袋31的摆动角度过大而导致扭簧327的弹力难以维持第二摆杆313与第一摆杆328之间的配合,即第二摆杆313位置发生变化,而脱离第一摆杆328,此时第一摆杆328继续反向转动,而捕捉袋31失去第一摆杆328的动力之后,捕捉袋31受重力而正向摆动至初始位置,同时,扭簧327释放弹性势能,以带动捕捉袋31绕转杆326转动复位,从而使得捕捉袋31在正向摆动的过程中,其上的条形孔311也朝向掌子面。
49.如此一来,通过多个捕捉袋31的循环摆动,以形成气流封堵区域,以将可能产生的粉尘限制于掌子面附近。
50.s2、除尘通风,具体为,通风管1进行吹风,并利用掌子面的阻挡,使得空气沿远离掌子面方向回流,即使得空气中的灰尘也一并移动,然后吸风管2进行吸风,从而将粉尘依次从条形孔311、捕捉袋31内腔、第一柔性气管33,吸入至吸风管2内,以完成除尘,期间,往复摆动的捕捉袋31能够极大限度地捕捉粉尘,减少粉尘的逃逸,从而有效减少隧道内的粉尘,以便于后续机械开挖的施工开展。
51.s3、机械开挖:通过挖掘机扒渣,装载机装渣,自卸车运石渣至隧道外部。
52.s4、支护施工:对爆破过的掌子面进行检查,然后采用湿喷机械手初步喷射混凝土,再进行测量,然后利用钢拱架安装机进行钢拱架安装,同时采用数字锚杆台车来进行锚杆安装,并对钢拱架和锚杆位置的检查;焊接纵向连接筋后,再采用湿喷机械手进行最终的喷射混凝土工作。
53.s5:量测、判断围岩和柔性支护的形变,以获得实际参数,以对下一段施工的施工参数二次微调。
54.实施例2,与实施例1的不同之处在于,如图7所示,捕捉袋31为柔性囊体结构,即捕捉袋31需要注入空气才能维持膨胀状态,除尘装置还包括设于固定轴23上的充气结构和抽气结构(图中未示出),即充气结构用于往柔性囊体结构内充气,以确保捕捉袋31的膨胀形态,而抽气结构用于将柔性囊体结构内的填充空气从柔性囊体结构的上部抽走,且使柔性囊体结构向上干瘪;并且,捕捉袋31的下端设有配重板34。
55.当需要对粉尘进行捕捉时,充气结构启动,以使得捕捉袋31膨胀,从而具有较大体积的捕捉袋31能够极大限度捕捉粉尘,而当捕捉结束时,抽气结构启动,以抽走柔性囊体结
构内的空气,使柔性囊体结构干瘪,从而减少柔性囊体结构的体积,以便于后续的机械开挖设备的进场。
56.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1