一种大坡度巷道掘进辅助前行系统、掘进设备及掘进方法与流程
1.本技术涉及工程机械技术领域,尤其是涉及一种大坡度巷道掘进辅助前行系统、掘进设备及掘进方法。
背景技术:
2.大坡度掘进时,由于坡道阻力作用,掘进设备的钻进甚至行走都极为困难,这限制了掘进设备的应用,目前使用的方法多是人工打眼放炮,将掘进设备前方的地质结构进行物理破坏,然后掘进设备再进行掘进,或者在固定安装绞车后使用绞车拉动掘进设备前进,上述两种方式都制约了大坡度巷道掘进效率,还带来了较大的安全隐患。
技术实现要素:
3.本技术提供一种大坡度巷道掘进辅助前行系统、掘进设备及掘进方法,通过在掘进设备后方提供持续推进的方式来使掘进设备在大坡度前进时能够得到足够的支撑。
4.本技术的上述目的是通过以下技术方案得以实现的:第一方面,本技术提供了一种大坡度巷道掘进辅助前行系统,包括:底盘;两个履带式行走机构,对称设在底盘的底面上;两组滑动台,滑动台包括与底盘的顶面滑动连接的第一滑臂、与底盘的底面滑动连接的第二滑臂和两端分别与第一滑臂和第二滑臂固定连接的连接臂;多个液压式举升臂,间隔设在第一滑臂和第二滑臂上;第一承压梁,两端分别与同一组第一滑臂连接;第二承压梁,两端分别与同一组第二滑臂连接;顶进液压缸,设在底盘上,顶进液压缸的活塞与滑动台连接;液压站,设在底盘上,用于驱动履带式行走机构、液压式举升臂和顶进液压缸工作;以及控制器,设在底盘上并与液压站进行数据交互;其中,底盘的顶面和底面上的第一承压梁和第二承压梁交替设置。
5.在第一方面的一种可能的实现方式中,第一承压梁的工作面上设有第一加压梁,在远离第一承压梁工作面的方向上,第一加压梁的截面积趋于减小。
6.在第一方面的一种可能的实现方式中,第二承压梁的工作面上设有第二加压梁,在远离第二承压梁工作面的方向上,第二加压梁的截面积趋于减小。
7.在第一方面的一种可能的实现方式中,履带式行走机构包括:履带式行走轮组;液压升降腿,两端分别与履带式行走轮组和底盘连接,液压升降腿的控制端与液压站连接。
8.在第一方面的一种可能的实现方式中,底盘的顶面和底面上均设有测距传感器,
测距传感器与控制器的信号输入端连接。
9.在第一方面的一种可能的实现方式中,一个滑动台与两个顶进液压缸连接,与同一个滑动台连接的两个顶进液压缸分别设在底盘的顶面和底面上。
10.在第一方面的一种可能的实现方式中,还包括设在连接臂上的短臂和与短臂滑动连接的滑动套管;滑动套管向靠近和远离连接臂的方向移动。
11.第二方面,本技术提供了一种大坡度巷道掘进设备,包括如第一方面及第一方面任意实现方式中记载的大坡度巷道掘进辅助前行系统。
12.第三方面,本技术提供了一种大坡度巷道掘进方法,包括:履带式行走机构带动底盘移动至底盘上的滑动台顶在大坡度巷道掘进设备上;以及两组滑动台上的液压式举升臂交替顶升,其中一组滑动台上的液压式举升臂举升时,另一组滑动台推动底盘前方的大坡度巷道掘进设备。
附图说明
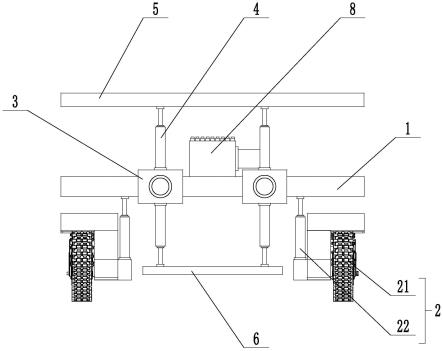
13.图1是本技术提供的一种辅助前行系统的主视图。
14.图2是基于图1给出的左视图。
15.图3是本技术提供的一种第一承压梁和第二承压梁的升降示意图。
16.图4是本技术提供的一种底盘与滑动台的连接示意图。
17.图5是本技术提供的一种第一承压梁的截面示意图。
18.图6是本技术提供的一种第二承压梁的截面示意图。
19.图7是本技术提供的一种控制器与液压站的连接示意框图。
20.图中,1、底盘,2、履带式行走机构,3、滑动台,4、液压式举升臂,5、第一承压梁,6、第二承压梁,7、顶进液压缸,8、液压站,9、控制器,11、测距传感器,21、履带式行走轮组,22、液压升降腿,31、第一滑臂,32、第二滑臂,33、连接臂,34、短臂,35、滑动套管,51、第一加压梁,61、第二加压梁。
具体实施方式
21.以下结合附图,对本技术中的技术方案作进一步详细说明。
22.请参阅图1和图2,为本技术公开的一种大坡度巷道掘进辅助前行系统,辅助前行系统由底盘1、履带式行走机构2、滑动台3、液压式举升臂4、第一承压梁5、第二承压梁6、顶进液压缸7、液压站8和控制器9等组成,履带式行走机构2的数量为两个,这两个履带式行走机构2对称设在底盘1的底面上,作用是驱动底盘1前进、后退和转向。
23.在一些可能的实现方式中,履带式行走机构2由轮架、安装在轮架上的滚轮组与液压马达和绕设在滚轮上的履带组成,液压马达与滚轮组中的一个滚轮连接。
24.液压马达的旋转方向决定底盘1的前进与后退,两个履带式行走机构2中的液压马达的转速差决定底盘1的转向。
25.滑动台3由第一滑臂31、第二滑臂32和连接臂33组成,第一滑臂31与底盘1的顶面滑动连接,第二滑臂32与底盘1的底面滑动连接,连接臂33的两端分别与第一滑臂31和第二
滑臂32固定连接。
26.底盘1上还安装有顶进液压缸7,顶进液压缸7的缸体部分固定安装在底盘1上,活塞与滑动台3连接,作用是推动滑动台3在底盘1上滑动。
27.请参阅图3,在一些可能的实现方式中,一个滑动台3同时与两个顶进液压缸7连接,这两个顶进液压缸7分别安装在底盘1的顶面和底面上,也就是其中一个顶进液压缸7与第一滑臂31连接,另一个顶进液压缸7与第二滑臂32连接。
28.使用双顶进液压缸7的推进方式能够提供更大的推力,同时还能够使滑动台3在底盘1上稳定的滑动,不会出现卡死现象。
29.第一滑臂31和第二滑臂32上均间隔设有多个液压式举升臂4,液压式举升臂4的主体部分固定在与之相邻的第一滑臂31或者第二滑臂32上,伸缩端连接在第一承压梁5或者第二承压梁6上。
30.具体的说,第一承压梁5的两端分别与两个同时安装在第一滑臂31上且对应的两个液压式举升臂4连接,第二承压梁6的两端分别与两个同时安装在第二滑臂32上且对应的两个液压式举升臂4连接。
31.在底盘1的顶面和底面上,第一承压梁5和第二承压梁6交替设置,也就是任意两个相邻的第一承压梁5之间有一个第二承压梁6,任意两个相邻的第二承压梁6之间有一个第一承压梁5,如图3所示。
32.第一承压梁5和第二承压梁6交替升起,这样就能够使两个滑动台3交替向前方的掘进设备施加推力。
33.举例说明,结合图3和图4,位于第一组滑动台3上的第一承压梁5在液压式举升臂4的推动下首先升起,顶在底盘1顶面上方和底面下方的巷道壁上,此时第二组滑动台3在顶进液压缸7的推动下向远离底盘1的方向移动,该过程中第二组滑动台3会向位于底盘1前方的掘进设备施加推力,推动掘进设备向前移动。
34.第二组滑动台3停止移动后,第二组滑动台3上的液压式举升臂4推动第二承压梁6升起,此时第二承压梁6顶在底盘1顶面上方和底面下方的巷道壁上,接着第一组滑动台3上的顶进液压缸7复位,第一承压梁5与底盘1顶面上方和底面下方的巷道壁脱离接触。
35.第一组滑动台3上的顶进液压缸7复位完成后,与第二组滑动台3连接的顶进液压缸7开始复位,该过程中底盘1会向靠近掘进设备的方向移动,直至与第二组滑动台3连接的顶进液压缸7复位完成。
36.接着重复上述过程,也就是两个滑动台3交替前行,向位于底盘1前方的掘进设备施加推力。施加推力的过程位于掘进设备的后方,不需要工作人员跑到掘进设备的前方进行人工打眼放炮和反复安装绞车等操作,既提高了掘进设备的前进速度,还保证了工作人员在掘进设备工作过程的安全性。
37.履带式行走机构2、液压式举升臂4和顶进液压缸7工作时由液压站8驱动,液压站8安装在底盘1上并由安装在底盘1上的控制器9进行控制。在一些可能的实现方式中,控制器9可以外接一个控制按钮操作手柄,由工作人员站在底盘1的侧面进行相关操作。
38.在一些可能的实现方式中,液压站8和控制器9使用电力驱动。
39.请参阅图5,作为申请提供的大坡度巷道掘进辅助前行系统的一种具体实施方式,在第一承压梁5的工作面上设有第一加压梁51,并且在远离第一承压梁5工作面的方向上,
第一加压梁51的截面积趋于减小。
40.第一加压梁51的作用是提高第一承压梁5的工作面的接触压力,有助于提高滑动台3提供的推力。
41.请参阅图6,作为申请提供的大坡度巷道掘进辅助前行系统的一种具体实施方式,第二承压梁6的工作面上设有第二加压梁61,并且在远离第二承压梁6工作面的方向上,第二加压梁61的截面积趋于减小。
42.第二加压梁61的作用是提高第二承压梁6的工作面的接触压力,有助于提高滑动台3提供的推力。
43.请参阅图1和图2,作为申请提供的大坡度巷道掘进辅助前行系统的一种具体实施方式,履带式行走机构2由履带式行走轮组21和液压升降腿22组成,液压升降腿22的两端分别与履带式行走轮组21和底盘1连接,作用是调整底盘的高度。液压升降腿22的控制端与液压站8连接,由液压站8进行驱动。
44.应理解,巷道的高度不尽相同,当申请公开的大坡度巷道掘进辅助前行系统开始工作时,底盘1应当位于巷道的中间位置处,这样才能够使位于底盘1顶面上方和底面下方的第一加压梁51与第二加压梁61能够同时与巷道的顶面和底面接触。因此对于不同的巷道,需要液压升降腿22来调节底盘1的高度。
45.请参阅图1,进一步地,底盘1的顶面和底面上均设有测距传感器11,测距传感器11与控制器9的信号输入端连接,用于检测底盘1顶面和巷道顶面之间的距离和底盘1底面与巷道底面之间的距离,为操作人员下发指令提供参考。
46.在一些可能的实现方式中,控制器9上设有显示屏,显示屏上显示测距传感器11的反馈数据。
47.请参阅图1和图2,作为申请提供的大坡度巷道掘进辅助前行系统的一种具体实施方式,在连接臂33上增加了短臂34,并在短臂34上增加了滑动套管35,短臂34固定在连接臂33上,滑动套管35与短臂34滑动连接,例如直接套在短臂34上,并且,滑动套管35与短臂34之间还存在间隙。
48.滑动套管35能够向靠近和远离连接臂33的方向移动,具体地说,在使用过程中,滑动套管35会与位于底盘1前方的掘进设备连接,这样可以使滑动台3向位于底盘1前方的掘进设备施加推力时,施力点能够相对固定,同时还能够避免出现打滑现象。
49.本技术还公开了一种大坡度巷道掘进设备,包括上述内容中记载的任意一种大坡度巷道掘进辅助前行系统。
50.本技术还公开了一种大坡度巷道掘进方法,包括以下步骤:s101,履带式行走机构带动底盘移动至底盘上的滑动台顶在大坡度巷道掘进设备上;以及s102,两组滑动台上的液压式举升臂交替顶升,其中一组滑动台上的液压式举升臂举升时,另一组滑动台推动底盘前方的大坡度巷道掘进设备。
51.本具体实施方式的实施例均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1