盾构机管片拼装机驱动方法、装置、系统、设备及介质与流程
本技术涉及工程机械设备,特别地,涉及一种盾构机管片拼装机驱动方法、装置、系统、设备及介质。
背景技术:
1、在我国,地铁、公路、铁路以及引水等基础工程需要通过盾构法修建许多隧道,盾构机在修建隧道时,需要利用管片拼装机拼装管片对已成型的隧道进行支护。在管片拼装的过程中,拼装机需要将管片抓取,并旋转运送到不同位置。由于在抓取管片旋转时,拼装机需要较大的扭矩,考虑到拼装机机械结构的紧凑性,一般采用功率密度较高的液压马达驱动拼装机旋转,而不是电机。当液压马达驱动拼装机向下旋转运动时,受重力影响,需要采用平衡阀对液压马达回油提供背压,此背压对拼装机的旋转起到反扭矩的作用,可以有效防止负负载对旋转运动造成抖动。虽然采用平衡阀保证了旋转的稳定性,但是在此过程中,平衡阀前后压差较大,浪费了一定的能量,不利于系统的节能性。
2、因此有必要研发一种盾构机管片拼装机的驱动系统,在拼装机向下旋转运动时,即能够防止负负载对旋转运动造成抖动,同时还可以将此过程中的能量进行回收,提高拼装机系统的节能性。
技术实现思路
1、本技术一方面提供了一种盾构机管片拼装机驱动方法,旨在解决现有的盾构机管片拼装机采用平衡阀保证旋转稳定性时,存在能量浪费,不利于系统节能的技术问题。
2、本发明采用的技术方案如下:
3、一种盾构机管片拼装机驱动方法,包括步骤:
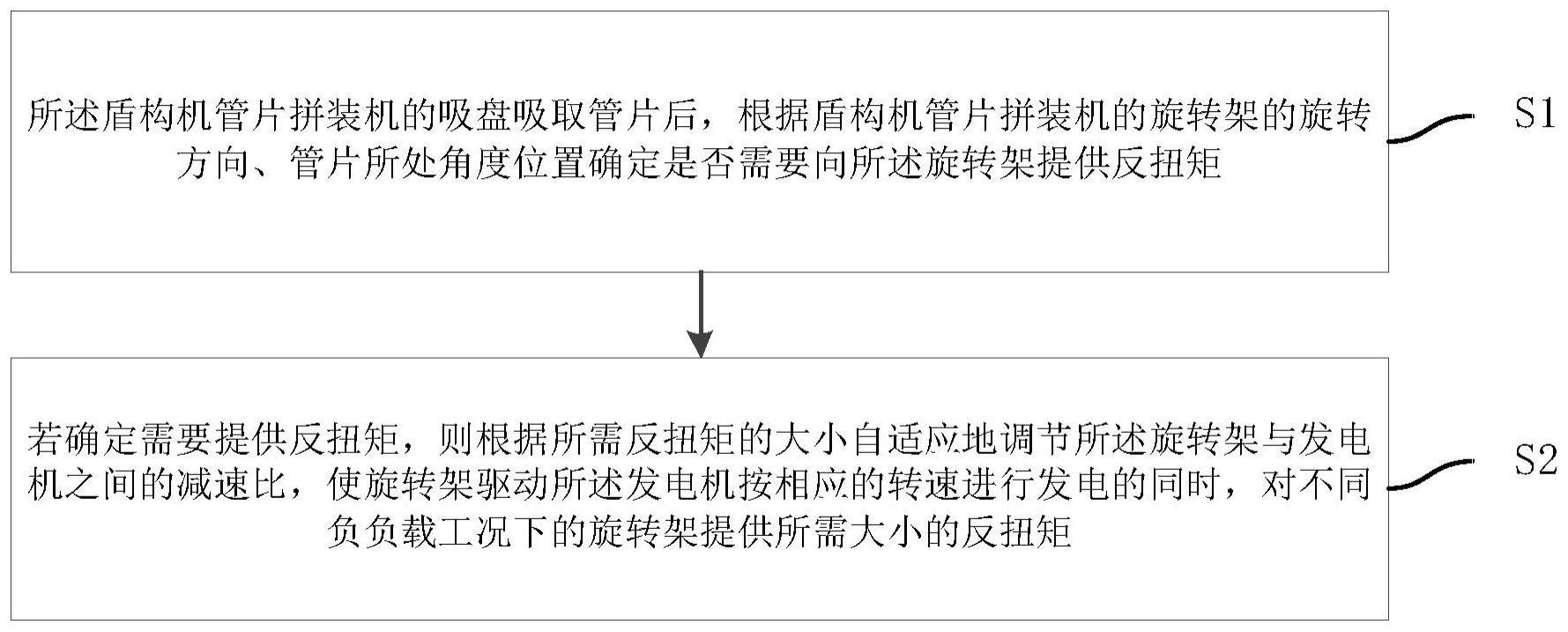
4、所述盾构机管片拼装机的吸盘吸取管片后,根据盾构机管片拼装机的旋转架的旋转方向、管片所处角度位置确定是否需要向所述旋转架提供反扭矩;
5、若确定需要提供反扭矩,则根据所需反扭矩的大小自适应地调节所述旋转架与发电机之间的减速比,使旋转架驱动所述发电机按相应的转速进行发电的同时,对不同负负载工况下的旋转架提供所需大小的反扭矩。
6、进一步地,所述盾构机管片拼装机的吸盘吸取管片后,根据盾构机管片拼装机的旋转架的旋转方向、管片所处角度位置确定是否需要向所述旋转架提供反扭矩,具体包括步骤:
7、当所述盾构机管片拼装机的旋转架旋转方向为顺时针或逆时针方向时,若所述管片在竖直朝上与竖直朝下之间的区域内由上至下地移动时,则确定需要向所述旋转架提供反扭矩。
8、进一步地,所述若确定需要提供反扭矩,则根据所需反扭矩的大小自适应地调节所述旋转架与发电机之间的减速比,使旋转架驱动所述发电机按相应的转速进行发电的同时,对不同负负载工况下的旋转架提供所需大小的反扭矩,具体包括步骤:
9、根据管片所处角度位置θ、管片至回转中心的距离l、管片质量m建立负负载工况下的力矩t得到当前负负载大小:
10、t=f(θ,l,m);
11、若旋转架的转速为n,则通过减速机传到发电机上的转速为n1=n×i减速机,则计算发电机产生的反扭矩为:
12、t发电机=f1(n1);
13、为平衡所述负负载,则通过减速机和旋转架放大后的反扭矩为t反:
14、t反=i减速机×i旋转架×t发电机=i减速机×i旋转架×f1(n1)
15、其中,i减速机为所述减速机的减速比,i旋转架为旋转架与减速机输入端之间的减速比;
16、由t反=t可以得出,不同负负载工况下,为了对旋转架产生所需大小的反扭矩,计算所述旋转架与发电机之间的减速比:
17、
18、使旋转架驱动所述发电机按相应的转速进行发电的同时,对不同负负载工况下的旋转架提供所需大小的反扭矩。
19、本技术另一方面实施例还提供了一种盾构机管片拼装机驱动装置,包括:
20、反扭矩判断模块,用于所述盾构机管片拼装机的吸盘吸取管片后,根据盾构机管片拼装机的旋转架的旋转方向、吸盘或管片所处角度位置确定是否需要向所述旋转架提供反扭矩;
21、反扭矩调节模块,用于若确定需要提供反扭矩,则根据所需反扭矩的大小自适应地调节所述旋转架与发电机之间的减速比,使旋转架驱动所述发电机按相应的转速进行发电的同时,对不同负负载工况下的旋转架提供所需大小的反扭矩。
22、进一步地,所述反扭矩调节模块包括:
23、负负载计算模块,用于根据管片所处角度位置θ、管片至回转中心的距离l、管片质量m建立负负载工况下的力矩t得到当前负负载大小:
24、t=f(θ,l,m);
25、电机反扭矩计算模块,用于若旋转架的转速为n,则通过减速机传到发电机上的转速为n1=n×i减速机,则计算发电机产生的反扭矩为:
26、t发电机=f1(n1);
27、反扭矩计算模块,用于为平衡所述负负载,则通过减速机和旋转架放大后的反扭矩为t反:
28、t反=i减速机×i旋转架×t发电机=i减速机×i旋转架×f1(n1)
29、其中,i减速机为所述旋转架与发电机之间的减速比,i旋转架为液压马达与旋转架之间的减速比;
30、减速比调节模块,用于由t反=t可以得出,不同负负载工况下,为了对旋转架产生所需大小的反扭矩,计算所述旋转架与发电机之间的减速比:
31、
32、使旋转架驱动所述发电机按相应的转速进行发电的同时,对不同负负载工况下的旋转架提供所需大小的反扭矩。
33、本技术另一方面实施例还提供了一种盾构机管片拼装机驱动系统,包括:
34、旋转指令器,用于向盾构机管片拼装机发出转速及转向指令;
35、角度传感器,用于检测盾构机管片拼装机的旋转架的旋转角度,得出管片所在角度位置;
36、行程传感器,用于检测盾构机管片拼装机的提升缸的行程得到管片至回转中心的距离l;
37、转速传感器,用于检测盾构机管片拼装机的旋转架的转速;
38、发电机,用于发电及提供反扭矩;
39、减速机,为可变速比减速机,用于将旋转架的动力按相应的减速比传递至发电机,并将发电机的反扭矩传递至所述旋转架;
40、离合器,设置在所述减速机和发电机输入端之间,用于减速机和发电机之间的动力结合和分离;
41、存储器,存储有计算机程序;
42、控制器,与所述旋转指令器、角度传感器、行程传感器、转速传感器、减速机、离合器、存储器信号连接,用于执行所述存储器存储的计算机程序时实现所述盾构机管片拼装机驱动方法的步骤。
43、进一步地,还包括接近开关,设置在所述盾构机管片拼装机的吸盘上并与所述控制器信号连接,用于检测吸盘是否抓取有管片。
44、进一步地,所述减速机采用cvt变速器、at变速器或双离合变速器。
45、本技术另一方面实施例还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现所述盾构机管片拼装机驱动方法的步骤。
46、本技术另一方面实施例还提供了一种存储介质,所述存储介质包括存储的程序,在所述程序运行时控制所述存储介质所在的设备执行所述的盾构机管片拼装机驱动方法的步骤。
47、相比现有技术,本技术具有以下有益效果:
48、本技术提供了一种盾构机管片拼装机驱动方法、装置及系统、设备及介质,所述方法在根据盾构机管片拼装机的旋转架的旋转方向、管片所处角度位置确定需要向所述旋转架提供反扭矩后,能够根据所需反扭矩的大小自适应地调节所述旋转架与发电机之间的减速比,最终通过改变发电机发电时的转速,使旋转架驱动所述发电机按相应的转速进行发电的同时,对不同负负载工况下的旋转架提供大小合适的反扭矩,防止不同的负负载对旋转运动造成抖动,同时还可以将此过程的中能量进行回收,以提高拼装机系统的节能性。
49、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照附图,对本发明作进一步详细的说明。
- 还没有人留言评论。精彩留言会获得点赞!