一种环保的钻/修井作业智能井口操作台的制作方法
1.本实用新型涉及石油工业的机械化修井作业装置,具体地说是一种环保的钻/修井作业智能井口操作台。
背景技术:
2.钻/修井作业作为石油开采过程中一个重要环节,井口作业是钻/修井作业中重要过程之一。井口作业的装置主要有,井口操作台、液压动力大钳、卡瓦、吊卡等装置,应用这些装置实现对管柱的上、卸扣操作,上、卸扣管柱是钻/ 修井作业中简单而又最频繁的操作,根据作业环境和作业过程,钻/修井作业中井口作业存在的事故隐患大,劳动强度高。
3.钻井与修井过程在井口工序相类似。近些年,钻井井口装置自动化程度不断提高,减少了工人大量的劳动量,但工作效率还有待提高。由于钻井和修井过程存在着差异,不能完全使用钻井井口装置,借鉴钻井井口装置的结构原理和控制方法,并结合实际修井作业的工作环境,设计钻/修智能井口操作台。
4.减少修井作业井口操作人员,不仅能够减少设备的使用成本,还能保证设备的实际开工率,确保油田井下作业按时保质完成,最终实现控制人工成本和增加生产效益。钻/修井作业智能井口操作台作为一种新技术,可以提高钻/修井工作人员作业安全性和降低工人的劳动强度。同时,必须具备高效的运移性、经济性、技术先进性和可靠性,在以人为本、安全生产、清洁生产的未来石油开采中,提出新的要求。
5.现有的修井作业存在以下缺点:
6.1)大型井口少量采用半自动化的铁钻工操作,自动化程度依旧很低。
7.2)对工人在频繁高强度的移动重达1吨的动力大钳,起下管时需注意躲避动力大钳的摇摆带来的伤害,在恶劣的环境中,工人劳动强度大,危险高。
8.3)传统修井作业中,管柱的起、下、卸作业占据了70%的作业时间,传统修井机作业井口需要3人协同、轮流交换,严重制约了修井作业效。
技术实现要素:
9.为解决背景技术中存在的上述技术问题,本实用新型提供一种环保的钻/ 修井作业智能井口操作台,结合现场经验,能实现对管柱上卸扣过程自动化,并对管柱直接进行清洗的优点。
10.本实用新型的技术解决方案是,本实用新型为一种环保的钻/修井作业智能井口操作台,其特殊之处在于:所述井口操作台包括井台、动力卡瓦、动力大钳,动力卡瓦设置在井台上,动力大钳设置在井台上,位于动力卡瓦的侧面,动力卡瓦下方设置有管杆外壁清洗装置。
11.进一步的,管杆外壁清洗装置包括外壁,外壁内设置有可旋转的内壁,内壁内侧环绕设置有清洗钢刷,内壁与外壁之间通过轴承连接,外壁上设置有驱动装置和传动装置,驱动装置通过传动装置与内壁连接,内壁上方和下方均通过轴承与外壁连接,驱动装置为气
动马达,传动装置为齿轮传动装置。
12.进一步的,外壁内侧上方设置有清洗喷头。
13.进一步的,清洗钢刷为多条,均布在内壁内侧。
14.进一步的,外壁底部设置有集污池,所述内壁上设置有排污孔。
15.进一步的,井口操作台还设置有自动扶正装置,自动扶正装置设置在动力卡瓦外侧。
16.进一步的,管杆外壁清洗装置底部设置有连接法兰,所述连接法兰下方设置井口防喷器。
17.进一步的,井台上设置有智能控制操作台。
18.本实用新型提供的环保的钻/修井作业智能井口操作台,通过智能控制操作台操作自动扶正装置、动力卡瓦以及动力大钳等设备,能实现对管柱上卸扣过程自动化,同时通过设置在井台上的管杆外壁清洗装置,直接实现管杆的清洗工作,具有环保、清洁无污染的优点。
附图说明
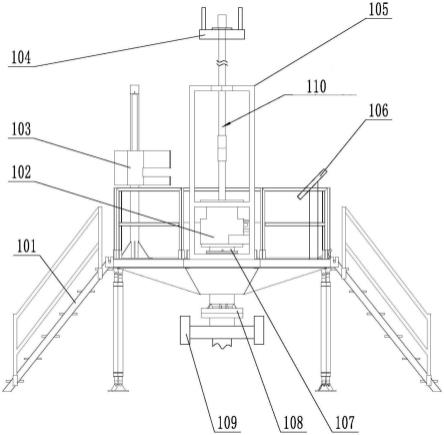
19.图1为本实用新型的结构示意图;
20.图2为本实用新型的管杆外壁清洗装置结构示意图。
21.附图标记说明如下:
22.101、井台;102、动力卡瓦;103、动力大钳;104、动力吊卡;105、自动扶正装置;106、智能控制操作台;107、管杆外壁清洗装置;108、连接法兰; 109、井口防喷器;110、油管/杆;
23.202、清洗喷头;203、驱动装置;204、传动装置;205、轴承;206、外壁;207、内壁;208、集污池;209、清洗钢刷。
具体实施方式
24.下面结合附图和具体实施例,对本实用新型的总体方案作进一步的详细说明:
25.参见图1,本实用新型具体实施例的结构中,井台101为主体支撑结构,动力卡瓦102、动力大钳103、自动扶正装置105、智能控制操作台106、管杆外壁清洗装置107、连接法兰108都集成于井台101上,井口防喷器109为修井防喷安全设备,以上布置为:连接法兰108与管杆外壁清洗装置107一体结合设备,动力卡瓦102固定于连接法兰108的上侧,其主要作用是自动卡紧/ 松开油管。动力大钳103为可水平旋转的部件,布置于井台101上,位于动力卡瓦102的侧面,其主要作用是自动紧/卸丝扣。自动扶正装置105布置于井台 101上,其主要作用是自动扶正管杆,便于工作,自动扶正装置105可采用现有的将管杆扶正管杆的装置,主要由主扶正臂,辅助扶正臂,液压推缸及扶正对中装置等组成,主扶正臂与井台连接,在井口对油管实现扶正,限位及对中功能。动力吊卡104布置于游车大钩上,其主要作用是自动起下油管/杆110,智能控制操作台106主要控制设备,布置于井台101的侧边,其主要作用是智能控制井口操作。
26.本实用新型的提升运作方式如下:在钻/修作业过程中,由游车大钩带动动力吊卡104上升,动力吊卡104主要负责自动抱紧油管/杆110,在提升过程中,管杆外壁清洗装置107同时运作对油管/杆110外壁负责清理。将油管/杆110 提升至指定高度后,由动力卡瓦
102将油管/杆110卡紧,再由动力大钳103 将油管/杆110丝扣卸开,再由自动扶正装置105将油管推出井台101,由外部承接装置将管/杆存储在外侧,游车大钩带动动力吊卡104下降,送至指定位置后放开,继续下一次提升运作,上述功能的操作由智能控制操作台106进行控制,可远程就地操作控制。下油管/杆110运作方式与上述方式相近,在此不做具体阐述。
27.参见图2,本实用新型的管杆外壁清洗装置107架设在井台101的内部,具体包括外壁206与集污池208构成的外部结构,外壁206内设置有内壁207,内壁207为旋转运动结构,内壁207上方和下方均通过轴承205与外壁206连接形成旋转机构,外壁206上设置有驱动装置203和传动装置204,驱动装置 203通过传动装置204内壁207连接。其中驱动装置203为气动马达,由空压机提供动力;传动装置204为齿轮传动装置。清洗钢刷209数条均布于内壁207 的内侧,负责清洗管杆外壁,清洗喷头202布置于外壁206内上侧,负责输送清洗介质。集污池208主要负责将清洗的油污排出至接口,收集污物。
28.管杆外壁清洗装置107的清洗运作方式如下:
29.油管/杆110由井台101提出井口,同时驱动装置203通过传动装置204,将动力传输至内壁207,内壁207同时转动,固定于内壁207内侧的清洗钢刷 209与油/管杆110接触旋转,对其外部进行清洗。清洗喷头202也与驱动装置 203同时工作,为清洗提供清洗介质。外部清洗的污物流向集污池208,由其内壁207上的排污孔流出,在外部收集。
30.本实用新型内容及上述实施例中未具体叙述的技术内容同现有技术。
31.以上,仅为本实用新型公开的具体实施方式,但本实用新型公开的保护范围并不局限于此,本实用新型公开的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1