液压支架人机协同控制策略推荐方法
本发明涉及煤矿智能化,尤其涉及一种液压支架人机协同控制策略推荐方法。
背景技术:
1、目前煤矿智能化工作面建设处于初级阶段,液压支架的智能电液控系统自动化技术已相对成熟,通过传感采集工作面环境、设备状态信息,根据采煤工艺要求设定液压支架多种控制模式的智能电液控系统程序,实现液压支架的升架、降架、移架、推溜、护帮板和伸缩梁等动作自动化控制。
2、然而,由于煤矿的地质条件不同,对于地质条件复杂的综采工作面,液压支架自动化与人工协同调控依然必不可少,而液压支架自动化与人工调控协同配合选择哪种方式,受到广泛关注。目前,液压支架自动化与人工调控方式的选择仍然依靠人工决策,不仅使劳动工人的工作负担比较重,而且与智能化煤矿建设的目的相悖。
技术实现思路
1、为解决上述技术问题,本发明提供一种液压支架人机协同控制策略推荐方法。本发明的技术方案如下:
2、一种液压支架人机协同控制策略推荐方法,其包括:
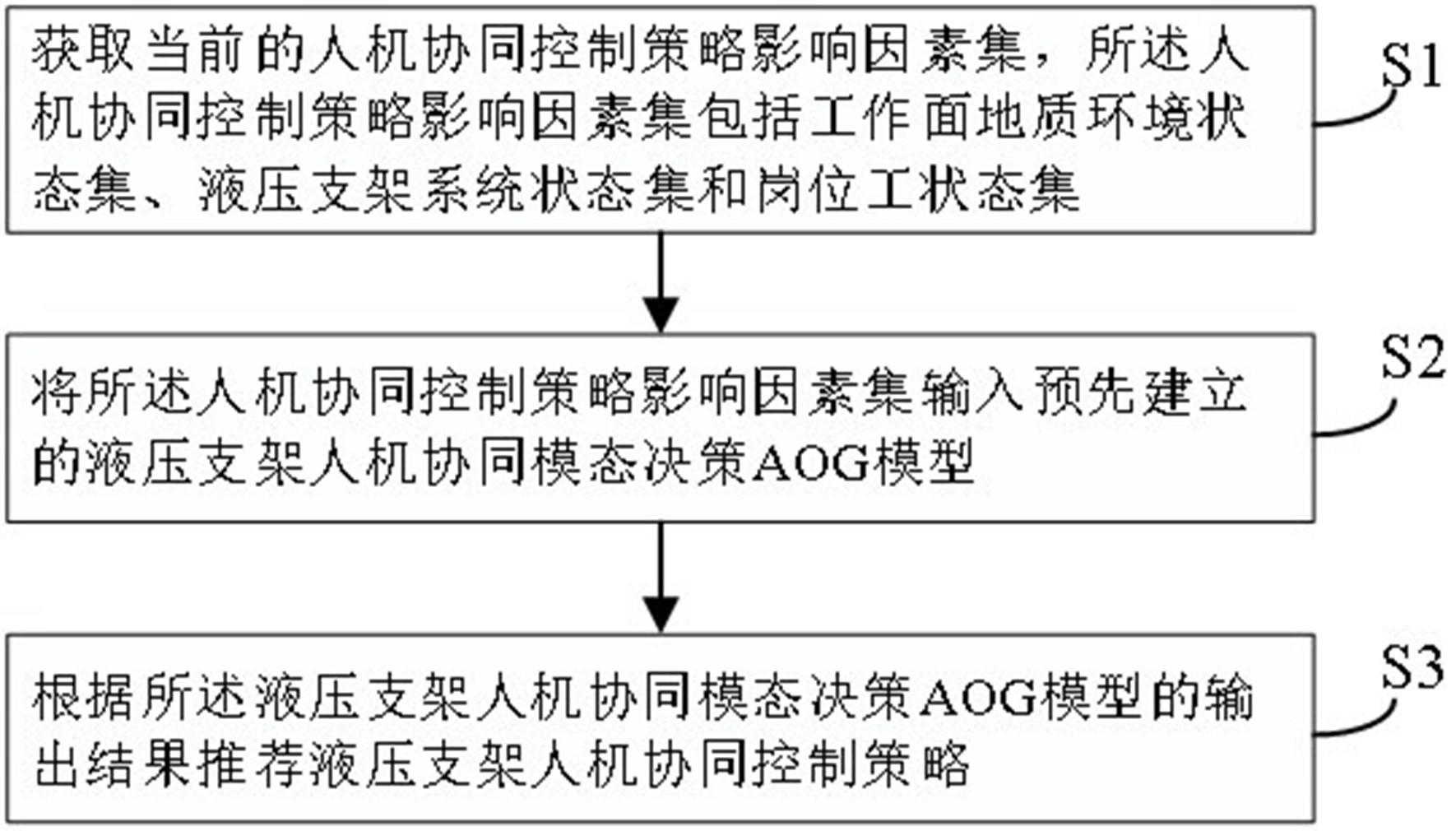
3、s1,获取当前的人机协同控制策略影响因素集,所述人机协同控制策略影响因素集包括工作面地质环境状态集、液压支架系统状态集和岗位工状态集;
4、s2,将所述人机协同控制策略影响因素集输入预先建立的液压支架人机协同模态决策aog模型;
5、s3,根据所述液压支架人机协同模态决策aog模型的输出结果推荐液压支架人机协同控制策略。
6、可选地,所述液压支架人机协同控制策略包括人工式协同控制模态、分工式协同控制模态、批准式协同控制模态和否决式协同控制模态;
7、所述人工式协同控制模态是指:全部由岗位工操作完成控制任务,岗位工直接观测液压支架状态并现场完成操作或通过智能电液控系统人机交互实现远程操作;
8、分工式协同控制模态是指:由岗位工和智能电液控系统共同独立完成控制任务,岗位工根据控制目标和智能电液控系统执行能力将控制任务分解为多个纵向或横向子任务,并将子任务分配至智能电液控系统,智能电液控系统通过感知液压支架状态数据实现闭环智能控制并完成控制任务,智能电液控系统分析液压支架状态数据和其子任务完成情况,向岗位工提供未完成子任务的决策/执行方案,岗位工根据方案适时合理完成未完成子任务;
9、批准式协同控制模态是指:主要由智能电液控系统独立完成控制任务,智能电液控系统根据当前工况向岗位工提供一个决策/行动方案,决策/行动方案由岗位工批准后才能执行,整个控制过程岗位工为监管角色,随时可介入取得控制权限;
10、否决式协同控制模态是指:主要由智能电液控系统独立完成控制任务,智能电液控系统根据当前工况向岗位工提供一个决策/行动方案,且智能电液控系统若在预设时间内未得到岗位工否决,则自主执行决策/行动方案。
11、可选地,所述工作面地质环境状态集的因素包括煤层地质条件、瓦斯粉尘环境;所述煤层地质条件的因素等级包括构造复杂、少量构造、顶板破碎、条件完好;所述瓦斯粉尘环境的因素等级包括瓦斯粉尘均较高、仅瓦斯较高、仅粉尘较高、瓦斯粉尘均正常;
12、所述液压支架系统状态集的因素包括采煤机速度、液压支架智能水平、液压支架系统状态;所述采煤机速度的因素等级包括超出跟机能力上限、较快、正常、较慢;液压支架智能水平的因素等级包括自动控制功能失效、仅中间段自动控制、全段1次刀自动控制、全段多次刀自动控制;液压支架系统状态的因素等级包括完全失效、关键功能件失效、非必须功能件失效、全部完好;
13、所述岗位工状态集的因素包括岗位工技术水平、岗位工任务负荷;所述岗位工技术水平的因素等级包括非常熟练、较熟练、中等、新人;所述岗位工任务负荷的因素等级包括无任务、低负荷、满负荷、超负荷。
14、可选地,所述s2在将所述人机协同控制策略影响因素集输入预先建立的液压支架人机协同模态决策aog模型时,包括:
15、s21,对人机协同控制策略影响因素集中各因素的因素等级基于二值化赋值规则进行赋值,得到人机协同控制策略影响因素集的二值化序列;
16、s22,将人机协同控制策略影响因素集的二值化序列输入预先建立的液压支架人机协同模态决策aog模型。
17、可选地,所述s3在根据所述液压支架人机协同模态决策aog模型的输出结果推荐液压支架人机协同控制策略时,包括:
18、根据所述液压支架人机协同模态决策aog模型的二值化输出结果序列推荐液压支架人机协同控制策略。
19、可选地,所述根据所述液压支架人机协同模态决策aog模型的二值化输出结果序列推荐液压支架人机协同控制策略,包括:
20、当所述液压支架人机协同模态决策aog模型的二值化输出结果序列包括一种人机协同控制模态时,直接将所述液压支架人机协同模态决策aog模型的二值化输出结果序列所指示的人机协同控制模态作为液压支架人机协同控制策略;
21、当所述液压支架人机协同模态决策aog模型的二值化输出结果序列包括至少两种人机协同控制模态时,将每种人机协同控制模态的预设分值和所述液压支架人机协同模态决策aog模型的二值化输出结果序列进行与运算确定每种人机协同控制模态的分值,根据每种人机协同控制模态的分值和预先设定的偏好型模态推荐液压支架人机协同控制策略。
22、可选地,所述根据每种人机协同控制模态的分值和预先设定的偏好型模态推荐液压支架人机协同控制策略,包括:
23、当预先设定的偏好型模态为人工偏好型时,通过如下公式(1)计算输出模态分值:(1);
24、当预先设定的偏好型模态为机器偏好型时,通过如下公式(2)计算输出模态分值:(2);
25、公式(1)和公式(2)中,m为输出模态分值,mi、mj为人机协同控制模态的预设分值和所述液压支架人机协同模态决策aog模型的二值化输出结果序列的与运算结果;
26、将所述输出模态分值对应的人机协同控制模态作为液压支架人机协同控制策略。
27、上述所有可选技术方案均可任意组合,本发明不对一一组合后的结构进行详细说明。
28、借由上述方案,本发明的有益效果如下:
29、通过预先建立液压支架人机协同模态决策aog模型,并在获取到当前的人机协同控制策略影响因素集后输入液压支架人机协同模态决策aog模型,进而根据液压支架人机协同模态决策aog模型的输出结果推荐液压支架人机协同控制策略,提供了一种液压支架人机协同控制策略的推荐方法,该方法可以根据当前的人机协同控制策略影响因素集自动推荐液压支架人机协同控制策略,减轻了岗位工的工作负担的同时,对智能化煤矿的建设也有推动作用。
30、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
技术特征:
1.一种液压支架人机协同控制策略推荐方法,其特征在于,包括:
2.根据权利要求1所述的液压支架人机协同控制策略推荐方法,其特征在于,所述液压支架人机协同控制策略包括人工式协同控制模态、分工式协同控制模态、批准式协同控制模态和否决式协同控制模态;
3.根据权利要求1或2所述的液压支架人机协同控制策略推荐方法,其特征在于,
4.根据权利要求3所述的液压支架人机协同控制策略推荐方法,其特征在于,所述s2在将所述人机协同控制策略影响因素集输入预先建立的液压支架人机协同模态决策aog模型时,包括:
5.根据权利要求4所述的液压支架人机协同控制策略推荐方法,其特征在于,所述s3在根据所述液压支架人机协同模态决策aog模型的输出结果推荐液压支架人机协同控制策略时,包括:
6.根据权利要求5所述的液压支架人机协同控制策略推荐方法,其特征在于,所述根据所述液压支架人机协同模态决策aog模型的二值化输出结果序列推荐液压支架人机协同控制策略,包括:
7.根据权利要求6所述的液压支架人机协同控制策略推荐方法,其特征在于,所述根据每种人机协同控制模态的分值和预先设定的偏好型模态推荐液压支架人机协同控制策略,包括:
技术总结
本发明涉及一种液压支架人机协同控制策略推荐方法,属于煤矿智能化技术领域。包括:获取当前的人机协同控制策略影响因素集,人机协同控制策略影响因素集包括工作面地质环境状态集、液压支架系统状态集和岗位工状态集;将人机协同控制策略影响因素集输入预先建立的液压支架人机协同模态决策AOG模型;根据液压支架人机协同模态决策AOG模型的输出结果推荐液压支架人机协同控制策略。本发明可以根据当前的人机协同控制策略影响因素集自动推荐液压支架人机协同控制策略,减轻了岗位工的工作负担的同时,对智能化煤矿的建设也有推动作用。
技术研发人员:付翔,李浩杰,秦一凡
受保护的技术使用者:太原理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!