基于支架区域化控制的放煤方法
本发明涉及基于支架区域化控制的放煤方法。
背景技术:
1、智能化放煤技术是物联网技术、大数据技术、通信技术等技术与煤矿综放开采工艺深度融合的产物,涉及开采环境的智能感知、设备空间位姿的智能监测、放煤工艺的智能选择、关窗时机的智能决策、放煤机构的智能控制等方面。其中,放煤机构动作的精确控制是实现智能化放煤的关键,而实际生产中,存在下述不足:
2、第一、综放工作面的跨度较大,液压支架与采煤机间隔距离的不同导致顶煤的破碎程度和裂隙发育水平具有明显的差异;
3、第二、放煤工序不同环节间的耦合度较高,采煤机的割煤速度和行走速度直接影响放煤方式和放煤机构开关窗时机的选择,采煤机所处的位置直接影响具有不同间隔距离液压支架的动作选择,相邻支架的配合程度会直接影响放煤漏斗的形态,若配合不当容易导致区域顶煤流向相邻放煤口,形成高低不均的畸形顶煤区域。
技术实现思路
1、针对上述问题,本发明提供基于支架区域化控制的放煤方法,依据间隔距离将液压支架动态划分为不同的放煤区域,以执行不同的放煤操作,从而降低顶煤的放出难度和放出持续时长,进而提高综放工作的放出效率和顶煤的回收率,同时避免顶煤冒落对采煤机造成伤害。
2、名词解释:
3、(1)首架:以采煤机位置为计算原点,每个区域距离采煤机最近的支架为首架;
4、(2)新架:以采煤机行走方向为基准,采煤机即将到达的支架;
5、(3)下一架的方向是:区域内支架相对采煤机距离增大的方向;
6、(4)上一架的方向是:区域内支架相对采煤机距离减小的方向;
7、(5)区域的推进方向是:采煤机的行走方向;
8、(6)区域推进一架所用的时间:向采煤机的行走方向(区域的推进方向)推进区域分布,推进距离为一架时所用的时间。
9、为实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:
10、基于支架区域化控制的放煤方法,包括如下步骤:
11、步骤1、初始化综放工作面支架区域分布:
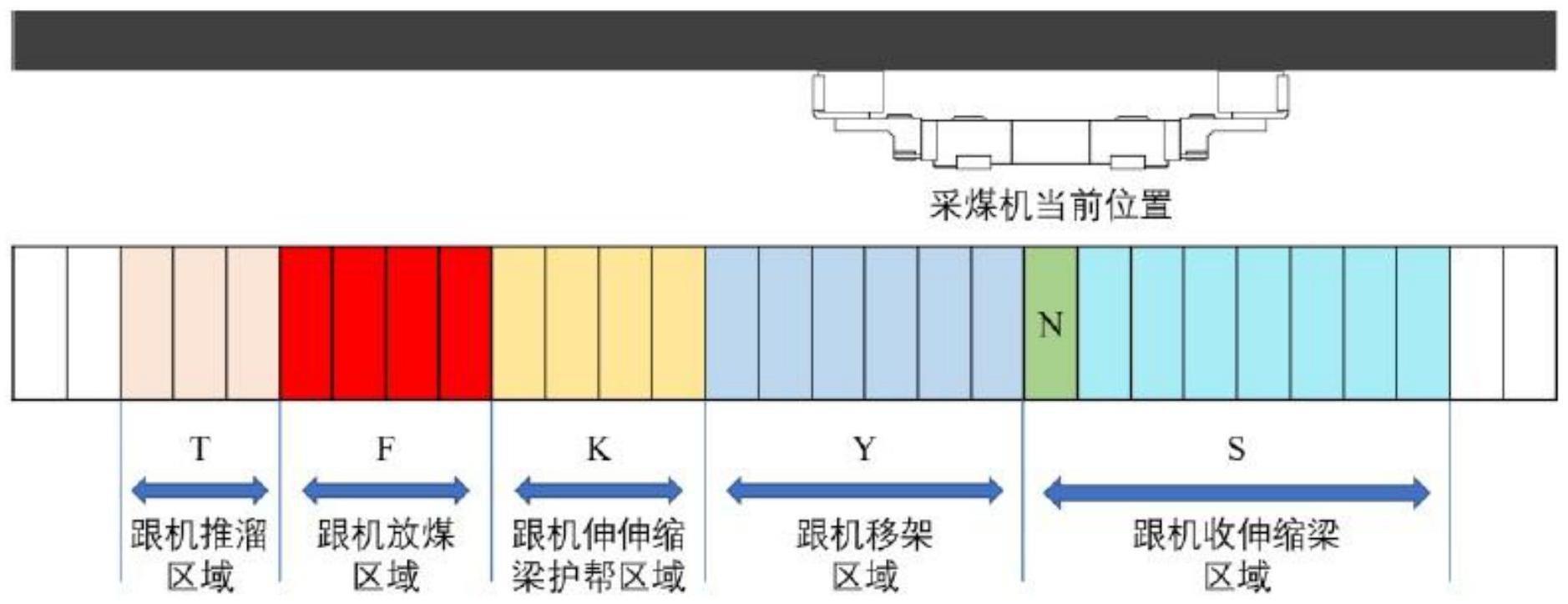
12、沿着采煤机的割煤方向将支架区域依次划分为跟机推溜区域、跟机放煤区域、跟机伸伸缩梁护帮区域、跟机移架区域、跟机收伸缩梁区域,其中,跟机收伸缩梁区域宽度为s架,跟机移架区域宽度为y架,跟机伸伸缩梁护帮区域宽度为k架,跟机放煤区域宽度为f架,跟机推溜区域宽度为t架;
13、进入步骤2;
14、步骤2、采集采煤机的定位信息,结合采煤机当前位置及各区域支架数量确定各区域首个支架及末尾支架的架号:
15、其中,采煤机当前位置对应跟机收伸缩梁区域的首个支架且支架号为n,跟机收伸缩梁区域对应的支架号范围为[n,n+s-1];跟机移架区域对应的支架号范围为[n-y,n-1];跟机伸伸缩梁护帮区域对应的支架号范围为[n-y-k,n-y-1];跟机放煤区域对应的支架号范围为[n-y-k-f,n-y-k-1];跟机推溜区域对应的支架号范围为[n-y-k-f-t,n-y-k-f-1];
16、进入步骤3;
17、步骤3、确定各支架所需的平均放煤时长及跟机放煤区域的推进速度,进入步骤4;
18、步骤4、确定采煤机行走速度及截割速度,进入步骤5;
19、步骤5、分区域执行不同动作指令集,进入步骤6;
20、步骤6、当各区域动作指令集传递至区域对应的最后一个支架时,终止动作指令集的传递,判断综放工作面是否结束放煤,若没有结束,则采集采煤机的定位信息,结合采煤机当前位置及各区域支架数量确定各区域首个支架及末尾支架的架号,并进入步骤5直至综放工作面结束放煤。
21、优选,步骤1中,根据矿井地质条件、实际工作面开采环境、工作面设备配套水平、工作面自动化程度及日产量要求确定各区域对应的支架数量,初始化综放工作面支架区域分布。
22、优选,步骤3中,在现场进行一轮试验放煤,统计各支架达到终止阈值所用时长,取平均作为综放工作面的平均放煤时长,依据支架所需的平均放煤时长确定跟机放煤区域的推进速度vt,并将该区域的推进速度应用于其他各区域,实现全区域的协调控制;同时在后续的自动放煤中,统计不同轮次的放煤时长,当相邻轮次平均放煤时长误差达到n秒时,进行一次平均放煤时长的更新,并同步更新区域推进速度,其中:vt=f/tf,f表示放煤区域宽度,tf表示平均放煤时长,n依据煤层赋存情况设定。
23、优选,步骤4中,依据跟机放煤区域的推进速度vt计算采煤机的行走速度vx和截割角速度w:行走速度vx=vt,截割角速度w=2πvx/x,其中,x为采煤机滚筒转动一圈的时间周期内采煤机前进的距离。
24、优选,由液压支架集控系统将各区域的控制数据分别发送给不同区域首个支架,当采煤机开始截割时,各区域首架同步开始执行其各自的动作指令集,并依据区域推进速度,将动作指令集以类似时间流的方式传递给同区域的后续支架;同时实时判断各区域支架动作的完成度,以跟机放煤区域支架动作完成度为基准,实时调整采煤机的行走速度和截割速度,使采煤机行走速度与跟机放煤区域推进速度始终相匹配。
25、优选,跟机收伸缩梁区域执行动作指令集为:在首架接收动作指令并开始执行收回伸缩梁动作t/s秒后,将该动作指令集发送至下一架,并依次类推,使该区域的s个支架伸缩梁呈线性收回,始终保证采煤机进入新架范围时,该新架伸缩梁处于完全收回的状态;其中,t表示全区域向前推进一架所用的时间。
26、优选,跟机移架区域执行动作指令集为:在首架接收动作指令并开始执行推移支架动作t/y秒后,将该动作指令集发送至下一架,并依次类推,使该区域的y个支架呈线性推移,保证采煤机进入新架范围时,新架的上一架正好完成前向推移动作;其中,t表示全区域向前推进一架所用的时间。
27、优选,跟机伸伸缩梁护帮区域执行动作指令集为:在首架接收动作指令并开始执行伸出伸缩梁动作t/k秒后,将该动作指令集发送至下一架,并依次类推,使该区域的k个支架伸缩梁呈线性伸出,保证当跟机移架区域尾架完成前向推移动作后,跟机伸伸缩梁护帮区域首架开始执行伸伸缩梁护帮动作;其中,t表示全区域向前推进一架所用的时间。
28、优选,跟机放煤区域执行动作指令集为:当首架接收到动作指令后,首架开始执行收插板、降尾梁动作至期望行程,并实时采集磁致伸缩位移传感器和自然射线探测器的数据,在执行动作t/f秒后,将该动作指令集发送至下一架,并依次类推,当累计自然射线辐射强度达到终止放煤的强度阈值时,记录开窗时长信息并向电液控制系统发送终止放煤的执行信号,由电液控制系统控制尾梁升起和插板伸出至初始状态结束放煤;其中,t表示全区域向前推进一架所用的时间。
29、优选,跟机推溜区域执行动作指令集为:在首架接收动作指令并开始执行推移刮板输送机动作t/t秒后,将该动作指令集发送至下一架,并依次类推,使该区域的刮板输送机呈线性推溜,保证跟机放煤区域支架最后一架完成放煤动作后,跟机推溜区域首架开始执行推移刮板输送机动作;其中,t表示全区域向前推进一架所用的时间。
30、本发明的有益效果是:
31、第一、液压支架受区域划分的影响,随着放煤状态的改变不断动态更新信息的标识符,因此该区域的划分具有高度准确性,不仅降低了顶煤放出的操作难度,还提高了顶煤的回收率。
32、第二、依据支架间隔采煤机的水平距离将液压支架划分为不同的区域并实时更新,以执行不同的动作指令,可以有效避免由于液压支架与采煤机间隔距离的不同导致顶煤的破碎程度和裂隙发育水平具有明显的差异的问题。
33、第三、本发明基于支架距采煤机的水平距离对综放面支架进行了区域划分,通过对不同区域的支架执行不同的动作指令实现了支架的区域化协调控制,进而推动了井下多智能体集成调控的实现,通过实时更新支架区域及待执行动作指令库即可完成工作面不同区域的连续推进。
- 还没有人留言评论。精彩留言会获得点赞!