一种基于惯性测量单元簇的钻井工具高精度姿态测量方法
本发明涉及一种基于惯性测量单元簇的钻井工具高精度姿态测量方法,属于导向钻井姿态测量领域。
背景技术:
1、石油与天然气作为现代工业的基础,对于国民经济的发展起着重要作用。我国油气储量丰富,但易开发常规资源较少,因此我国油气资源一直处于供不应求的状态,对外依从度较高。目前,我国能源方面形势仍不容乐观,随着国内油气勘探不断向更深层进发,对于钻井技术也提出了更高的要求。
2、旋转导向钻井作为最前沿的钻井技术之一,姿态测量是其导向控制的关键。如何快速有效的获得姿态参数,一直是导向钻井研究的一个热点,惯性技术的不断发展为导向钻井高精度姿态测量提供了坚实基础。现阶段惯性器件及惯性系统不断朝着高精度、低成本、小型化及数字化发展。因此,微惯性测量系统就成了惯性技术最具前景的一个研究方向,其核心器件惯性测量单元(imu)的精度提升和误差补偿更是重中之重。
3、惯性测量单元(imu)是一种测量载体姿态,位置及速度的敏感器件,是旋转导向钻井姿态测量的核心设备。近年来基于微机电系统(mems)技术的惯性测量单元(imu)得到快速发展,形成了mems惯性测量单元(mimu),一般由三轴mems陀螺仪和三轴mems加速度计组成,通过mimu陀螺仪及加速度计测量载体信息,解析便可以获得钻井工具姿态参数。mems技术的发展让惯性技术测量精度提升了一个层次,使得导向钻井工具的姿态测量也取得了一些突破。
4、但由于mems传感器的制造技术精度以及机械特性导致的噪声和误差,特别是商用mems传感器表现出相当大的偏置漂移和噪声,使得单一惯性测量单元难以满足导向钻井姿态测量精度要求。
技术实现思路
1、针对现有技术存在的上述不足,本发明的目的在于提供一种基于惯性测量单元簇的钻井工具高精度姿态测量方法。
2、为实现以上目的,本发明采用如下技术方案:
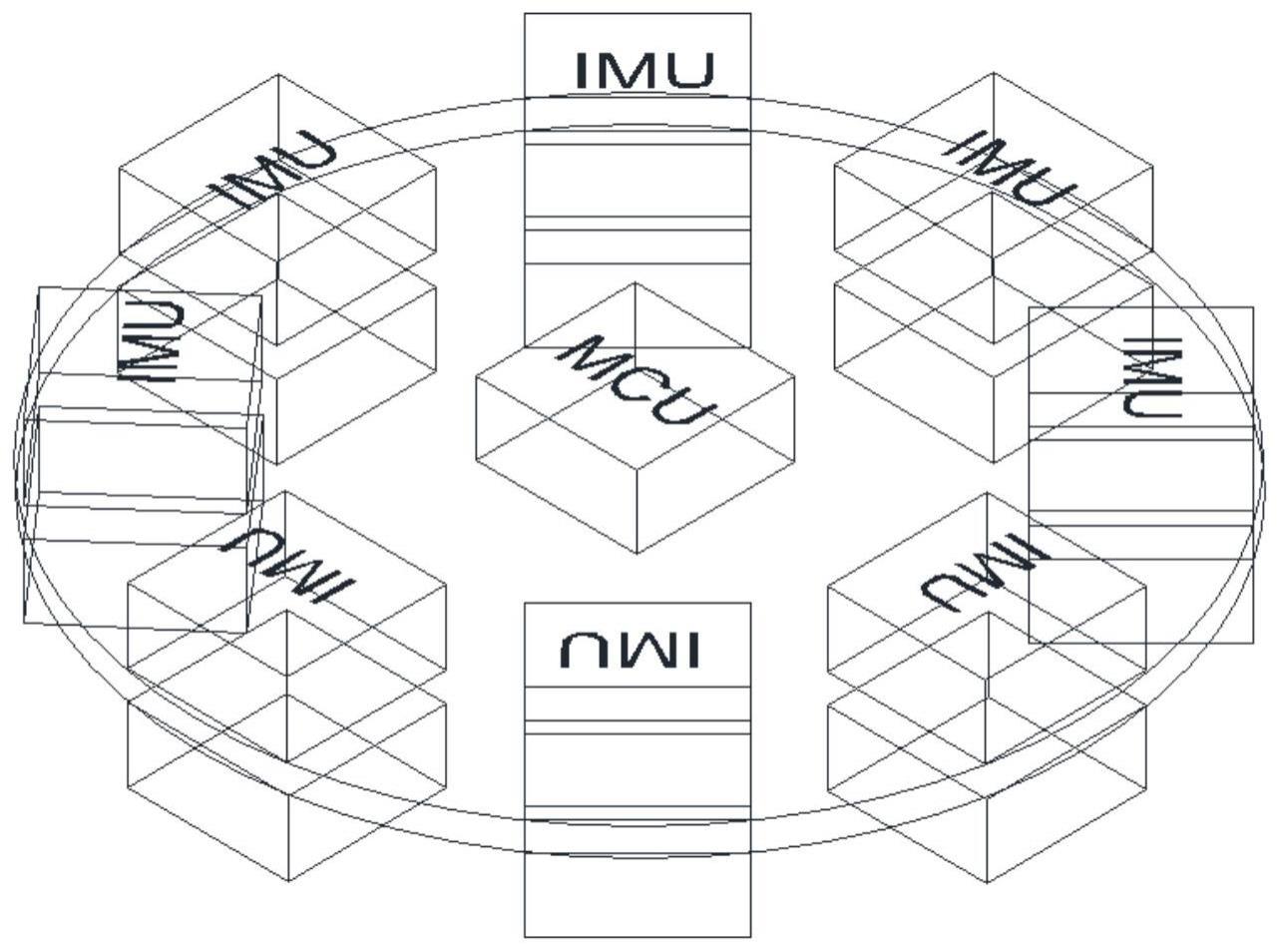
3、一种基于惯性测量单元簇的钻井工具高精度姿态测量方法,采用姿态测量系统进行测量,所述姿态测量系统包括一块电路板,以及集成在所述电路板上的惯性测量单元、命令与数据处理单元cdh和微处理控制单元mcu;所述惯性测量单元包含16个独立测量比力和角速率的imu,mcu通过总线与每个imu进行通信,角速率、比力和温度数据通过总线传递给cdh,cdh对数据进行校准,通过对角速率及比力进行平均,并在多个不同接口上输出平均值。
4、优选的,电路板的正面和反面上各设置8个且两两正交分布的独立imu。
5、优选的,所述姿态测量系统还包括线性稳压器,为传感器和微控制器供电。
6、进一步地,所述的基于惯性测量单元簇的钻井工具高精度姿态测量方法,包括:微机电系统惯性测量单元也即mimu的误差建模:
7、mimu由三轴微机电系统也即三轴mems陀螺仪及加速度计组成,在考虑标度因数、零篇误差、温度及噪声的情况下,建立mems陀螺仪误差模型:
8、
9、式中i为单位矩阵,是陀螺的数字输出(lsb),ω是真实角速率(deg/s),a是真实比力(g),kg是陀螺敏感标度因数(deg/s/lsb),bg是陀螺零偏误差(deg/s),sg是陀螺标度因数矩阵(unitless),定义为:
10、
11、mg为非对称陀螺交叉耦合矩阵(unitless),定义为:
12、
13、tg为陀螺温度系数(deg/s/℃),δt为实测温度与传感器标定温度之差(℃);
14、gg为g敏感性矩阵(deg/s/g),定义为:
15、
16、ηg是陀螺仪零均值白噪声过程(deg/s),εg是由陀螺仪白噪声过程(deg/s)驱动的随机游走序列;为了将陀螺数字输出从有符号的16位整数转换为deg/s,需要引入灵敏度比例因子kg该值在制造商数据表中找到;
17、根据陀螺仪误差模型可得角速率计算公式:
18、
19、在有限条件下建立加速度计误差模型,mems加速度计输出如下:
20、
21、其中为加速度计的数字输出(lsb),a为真实比力(g),ka为加速度计灵敏度标度因数(g/lsb),ba为加速度计零偏误差(g),sa为加速度计标度因数矩阵(unitless),定义为:
22、
23、ma为非对称加速度计交叉耦合矩阵(unitless),定义为
24、
25、ta是加速度计温度系数(g/℃),δt是测量温度与传感器校准温度之间的差值(℃),ηa是加速度计零均值白噪声过程(deg/s),εa是加速度计白噪声过程驱动的随机游走序列(deg/s)。为了将加速度计数字输出从有符号的16位整数转换为g,需要引入灵敏度比例因ka,该值在制造商数据表中找到。
26、根据加速度计误差模型可得加速度计算公式:
27、
28、为了便于分析,可以将陀螺和加速度计的误差模型合并简化为以下形式:
29、yi=x+vi (10)
30、其中yi是给定轴的测量角速率/比力,x是真实的角速率/比力,vi是输出噪声,下标i表示传感器标号,白噪声和由偏置随机游走引起的噪声都被集中到vi中,然后对每个imu的输出求平均,即可得到mimu的输出z:
31、
32、进一步地,所述的基于惯性测量单元簇的钻井工具高精度姿态测量方法,其特征在于,包括:惯性测量单元簇校准方法,校准过程要求mimu分别放置在六个正交方向,并以三种不同速率旋转,得到总共18个数据集,对于18个速率和方向的每个组合,数据收集一段时间,然后时间平均以消除信号的随机成分。
33、进一步地,所述的基于惯性测量单元簇的钻井工具高精度姿态测量方法,其特征在于,包括:姿态参数解算方法:
34、在钻井工具姿态测量过程中仪器坐标系为载体坐标系,地理坐标系为参考坐标系;基于四元数法推导姿态矩阵,钻井工具位置用向量表示为q;
35、q=q0+q1i+q2j+q3k (12)
36、式中q0表示标量部分系数,等于坐标系旋转角度一半的余弦值,q1、q2和q3表示矢量部分,i,j,k为x轴,y轴,z轴方向相同的单位向量;钻井工具姿态角的解算,包括方位角a,井斜角i’,工具面角t,以下是具体计算求解公式:
37、
38、
39、
40、在原来求解的基础上,对每一个姿态参数进行平均处理;通过引入四元数微分对现已知的加速度和角速率进行求解可得其具体四元数数值,进而得到钻井工具姿态参数。
41、优选的,数据收集一分钟。
42、与现有技术相比,本发明具有以下有益效果:
43、(1)本发明在单个电路板上集成多个惯性测量单元形成惯性单元簇,通过平均多个独立的角速率和加速度的测量值,可以有效提高钻井工具姿态测量精度,使测量装置能够长时间提供更准确的姿态信息,让其更适合导向钻井姿态测量领域应用,且实现了用低成本惯性测量单元达到高精度姿态测量的要求。
44、(2)本发明所述一种基于惯性测量单元簇的钻井工具高精度姿态测量方法的误差建模,能更好描述惯性测量单元在噪声环境下的输出。
45、(3)本发明所述一种基于惯性测量单元簇的钻井工具高精度姿态测量方法,惯性测量单元簇校准过程要求放置在六个正交方向,并以三种不同速率旋转,收集一段时间数据,然后时间平均以消除信号的随机成分,校准方法准确有效。
46、(4)本发明所述一种基于惯性测量单元簇的钻井工具高精度姿态测量方法通过平均多个imu测量值,使得解析的钻井工具姿态参数准确度较高。
- 还没有人留言评论。精彩留言会获得点赞!