盾构拼装机的控制系统及方法与流程
本发明涉及盾构施工,特指一种盾构拼装机的控制系统及方法。
背景技术:
1、从市场上来看,我国正在成为世界上盾构机需求量最大的国家,从技术上来看,盾构机代表了隧道掘进装备的发展方向,巨大的市场需求与我国相对滞后的盾构机技术之间的矛盾已经凸显。同时,由于盾构机施工是一个高风险的行业,其中最危险的就是拼装环节,拼装机需要拾取重达数吨到数十吨的混凝土预制块进行隧道结构的拼装,这时候必须保证拼装质量稳定性、高可靠性,才能保证工程顺利高效完成。
2、盾构拼装机的工作效率决定了整个盾构隧道的施工效率,现有盾构拼装机采用人工手动操作,基本上是操作人员站在盾构拼装机的旁边,对盾构拼装机进行操控拼装,尽管能够满足隧道施工的需求,但是安全性和效率都有待进一步提高。
技术实现思路
1、本发明的目的在于克服现有技术的缺陷,提供一种盾构拼装机的控制系统及方法,解决现有的盾构拼装机采用人工手动操作存在安全性和效率都有待提高的问题。
2、实现上述目的的技术方案是:
3、本发明提供了一种盾构拼装机的控制方法,包括如下步骤:
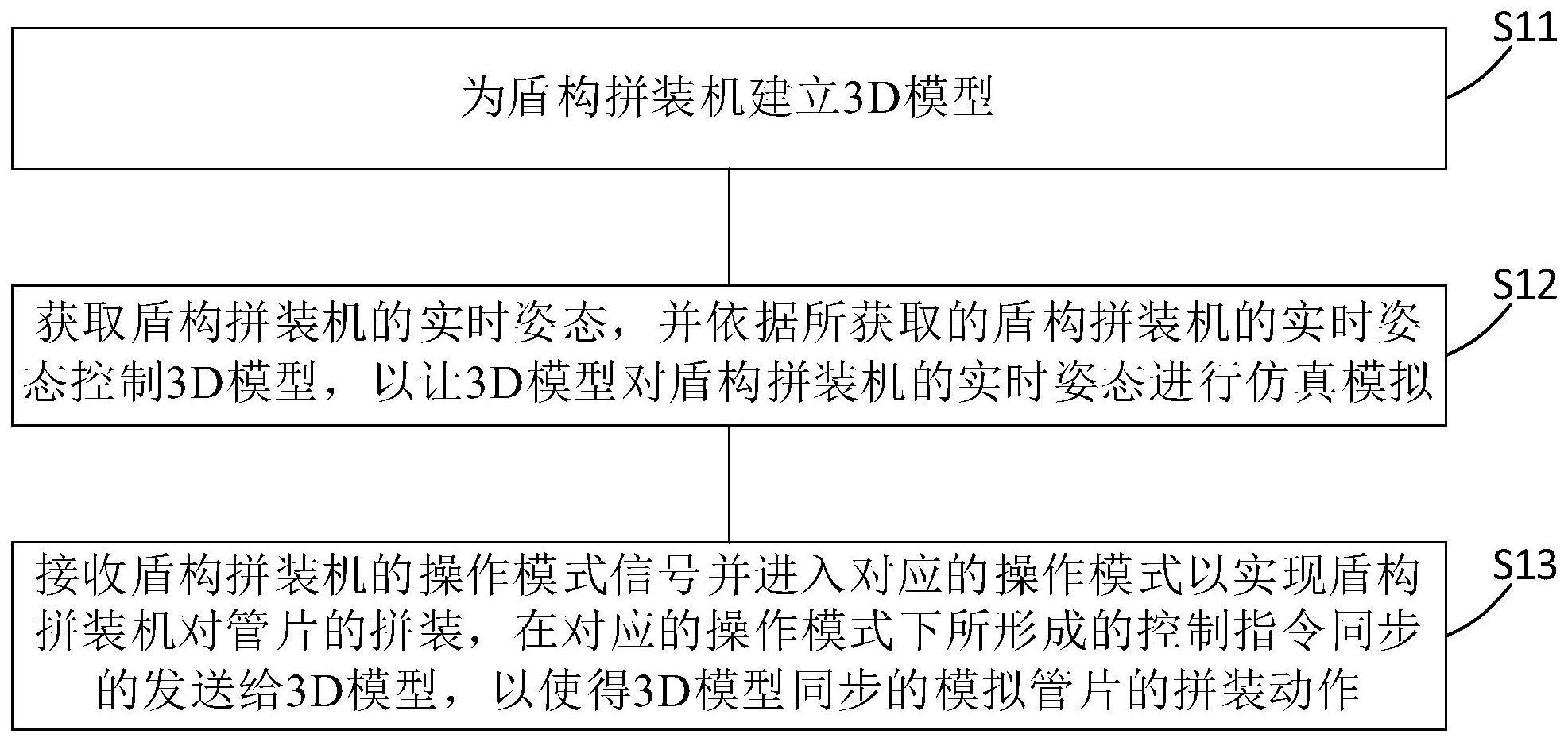
4、为盾构拼装机建立3d模型;
5、获取盾构拼装机的实时姿态,并依据所获取的盾构拼装机的实时姿态控制所述3d模型,以让所述3d模型对所述盾构拼装机的实时姿态进行仿真模拟;
6、接收盾构拼装机的操作模式信号并进入对应的操作模式以实现盾构拼装机对管片的拼装,在对应的操作模式下所形成的控制指令同步的发送给3d模型,以使得所述3d模型同步的模拟管片的拼装动作。
7、本发明的控制方法为盾构拼装机建立的3d模型,并且能够模拟盾构拼装机的拼装动作,实现三维仿真模拟,让操作人员能够在控制盾构拼装机的同时观看到对应的模拟动画,从而提高效率,且操作人员可在操作室对盾构拼装机的拼装进行控制,无需站在拼装机旁进行作业,能够提高施工的安全性。
8、本发明盾构拼装机的控制方法的进一步改进在于,在盾构拼装机进入半自动操作模式或全自动操作模式时,获取盾构拼装机的规划路径,并于所述3d模型中显示所获取的规划路径。
9、本发明盾构拼装机的控制方法的进一步改进在于,还包括:
10、接收动画模拟指令,并控制所述3d模型中对应的元器件模型沿所获取的规划路径进行移动以实现动画模拟拼装动作。
11、本发明盾构拼装机的控制方法的进一步改进在于,还包括:
12、为管片块建立对应的块模型;
13、获取盾构拼装机已拼装好的前一环管片的位姿,并依据所获取的前一环管片的位姿建立对应的成型管片环模型,将所建立的成型管片环模型与所述3d模型一起予以显示。
14、本发明盾构拼装机的控制方法的进一步改进在于,还包括:
15、为所述3d模型中每一元器件模型配置一对应的视角位置信息;
16、在选中某一元器件模型时,以对应的视角位置信息显示所述3d模型上对应的元器件模型。
17、本发明还提供了一种盾构拼装机的控制系统,包括:
18、模型建立单元,用于为盾构拼装机建立对应的3d模型;
19、姿态获取单元,用于获取盾构拼装机的实时姿态;
20、仿真模拟单元,与所述模型建立单元和所述姿态获取单元连接,用于依据所获取的盾构拼装机的实时姿态控制所述3d模型,以让所述3d模型对所述盾构拼装机的实时姿态进行仿真模拟;
21、信号接收单元,用于接收盾构拼装机的操作模式信号;
22、运行处理单元,与所述信号接收单元和所述盾构拼装机连接,用于根据接收的操作模式信号进入对应的操作模式,并将对应操作模式下形成的控制指令发送给所述盾构拼装机执行以实现对管片的拼装,同时还将所述控制指令发送给所述仿真模拟单元以使得所述3d模型同步的模拟管片的拼装动作。
23、本发明盾构拼装机的控制系统的进一步改进在于,还包括路径规划单元,与所述运行处理单元连接;
24、所述运行处理单元用于在进入半自动操作模式或全自动操作模式时,发送路径规划指令给所述路径规划单元;
25、所述路径规划单元根据接收的路径规划指令进行路径规划并形成路径规划结果;
26、所述运行处理单元还用于将所述路径规划结果发送给所述仿真模拟单元进行模拟显示。
27、本发明盾构拼装机的控制系统的进一步改进在于,所述仿真模拟单元还用于在接收到接收动画模拟指令后控制所述3d模型中对应的元器件模型沿所获取的规划路径进行移动以实现动画模拟拼装动作。
28、本发明盾构拼装机的控制系统的进一步改进在于,所述模型建立单元还用于为管片块建立对应的块模型;
29、所述姿态获取单元还用于获取盾构拼装机已拼装好的前一环管片的位姿;
30、所述仿真模拟单元用于依据所获取的前一环管片的位姿建立对应的成型管片环模型,并将所建立的成型管片环模型与所述3d模型一起予以显示。
31、本发明盾构拼装机的控制系统的进一步改进在于,还包括与所述模型建立单元连接的视角配置单元,用于为每一元件器模型配置一对应的视角位置信息;
32、所述仿真模拟单元也与所述视角配置单元连接,用于在选中某一元器件模型时,以对应的视角位置信息显示所述3d模型上对应的元器件模型。
技术特征:
1.一种盾构拼装机的控制方法,其特征在于,包括如下步骤:
2.如权利要求1所述的盾构拼装机的控制方法,其特征在于,在盾构拼装机进入半自动操作模式或全自动操作模式时,获取盾构拼装机的规划路径,并于所述3d模型中显示所获取的规划路径。
3.如权利要求2所述的盾构拼装机的控制方法,其特征在于,还包括:
4.如权利要求1所述的盾构拼装机的控制方法,其特征在于,还包括:
5.如权利要求1所述的盾构拼装机的控制方法,其特征在于,还包括:
6.一种盾构拼装机的控制系统,其特征在于,包括:
7.如权利要求6所述的盾构拼装机的控制系统,其特征在于,还包括路径规划单元,与所述运行处理单元连接;
8.如权利要求7所述的盾构拼装机的控制系统,其特征在于,所述仿真模拟单元还用于在接收到接收动画模拟指令后控制所述3d模型中对应的元器件模型沿所获取的规划路径进行移动以实现动画模拟拼装动作。
9.如权利要求6所述的盾构拼装机的控制系统,其特征在于,所述模型建立单元还用于为管片块建立对应的块模型;
10.如权利要求6所述的盾构拼装机的控制系统,其特征在于,还包括与所述模型建立单元连接的视角配置单元,用于为每一元件器模型配置一对应的视角位置信息;
技术总结
本发明涉及一种盾构拼装机的控制系统及方法,该方法包括如下步骤:为盾构拼装机建立3D模型;获取盾构拼装机的实时姿态,并依据实时姿态控制3D模型进行仿真模拟;接收盾构拼装机的操作模式信号并进入对应的操作模式以实现盾构拼装机对管片的拼装,在对应的操作模式下所形成的控制指令同步的发送给3D模型,以使得3D模型同步的模拟管片的拼装动作。本发明的控制方法为盾构拼装机建立的3D模型,并且能够模拟盾构拼装机的拼装动作,实现三维仿真模拟,让操作人员能够在控制盾构拼装机的同时观看到对应的模拟动画,从而提高效率,且操作人员可在操作室对盾构拼装机的拼装进行控制,无需站在拼装机旁进行作业,能够提高施工的安全性。
技术研发人员:秦元,翟一欣,马志刚,袁向华,沈辉,颜洪宇,段崧,张喆,吴兆宇,黄圣,张闵庆,庄欠伟,杨正,王祺,黄德中
受保护的技术使用者:上海隧道工程有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!