深海机械手与水力采集一体化智能悬浮式采矿装备
本发明涉及深海采矿装备,具体涉及一种深海机械手与水力采集一体化智能悬浮式采矿装备。
背景技术:
1、随着陆地资源的持续消耗和新能源产业的革新发展,深海多金属结核资源的开发愈发紧迫,深海海底有丰富的多金属结核、富钴结壳以及多金属硫化物等固体矿石资源,其中多金属结核矿石储量达数百亿吨,其中的钴、锰、镍是新能源产业的关键原料,需求极为庞大并具有重要战略意义。
2、目前深海采矿车行走多为履带式,但深海多金属结核矿区底质与陆地及近海粘土不同,深海底质为具有高流变性、高塑性的稀软沉积物,采矿车在行走时极易出现履带打滑、沉陷等严重限制深海采矿效率的技术问题,导致采矿作业无法持续进行,且行进过程会对沉积物进行破坏扰动。亟需一种解决沉陷打滑问题,考虑海底较大流体阻力因素,突破传统的智能海底行进集矿方式。
3、集矿是采矿系统中技术最复杂、最关键的部分,深海矿产资源采集技术主要有三种:机械式、水力式、混合式。目前,水力采集应用最为广泛,水力采集过程本质上就是利用水射流形成的流场将结核从沉积物中剥离并输送到集矿车中,采集效率高,但对海底的扰动较大,容易对海洋环境造成影响。而深海机械手是一种特殊设计用于在深海环境下操作的机械手,它通常由多个关节和执行器组成,具备高度灵活性和可控性。机械手臂使用液压或电动执行器来提供力量和运动控制,通过模仿人的手掌来实现对矿物的抓取和操作,机械手可实现精准抓取对海底几乎没有扰动,但效率较低、需要精确的控制,由于深海环境的极端条件和挑战,深海机械手安全可靠抓取矿物仍然是一个复杂而具有挑战性的技术领域。
技术实现思路
1、为了解决上述存在的问题,本发明的目的是提供一种深海机械手与水力采集一体化智能悬浮式采矿装备,可实现采矿装备浮游前进,具备长周期全局路径规划,结合多个机械手与水力采集,有效解决水力采集对海底扰动较大,机械手抓取效率较低、精确控制难度大以及采矿车行走出现的打滑、沉陷问题,采用智能控制算法进行路径规划,提供智能、采集性能优良、对海底扰动小的技术与装备。
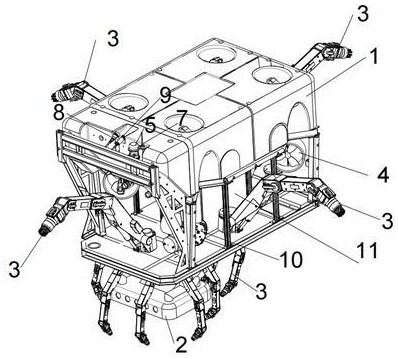
2、为实现上述目的,本发明采用下述技术方案:一种深海机械手与水力采集一体化智能悬浮式采矿装备,其特征在于,包括悬浮车体结构、集矿机构、智能控制系统、推进系统;
3、所述的悬浮车体结构包括车体框架、浮力体、升沉系统,整体车体为框架式结构,外围框架能够保护车体的其他部件,具有较高的稳定性,且便于更换设备;所述浮力体采用密度小、抗压能力强、不吸水、耐海水腐蚀的发泡固体材料,所述升沉系统包括空气压缩装置与螺旋桨,螺旋桨转动角度为0-95度,减轻在升沉过程中的阻力与对海底环境的扰动;
4、所述集矿机构包括水力采集结构、机械手、矿石收集箱,水力采集结构位于车身的底部,包括水力捕捉系统、冲采喷嘴、射流管路、水力输送通道、抑羽流罩;机械手位于车体四周及车体下部水力采集结构的四周,分为大小机械手,包括驱动装置、机械手臂、照明识别系统、多指联动抓取手,多个机械手与水力采集机构根据结核尺寸数量进行梯度式任务分配,实现多目标组合优化;
5、所述智能控制系统包括传感器、摄像头、声呐、照明设备、测量系统、智能程序设置、多层次路径规划,涉及装备均具有防水防腐蚀功能,传感器、摄像头、声呐、测量系统安装于车体顶部,照明设备安装于车体中部,感知自身的状态与周围的环境,识别执行任务的位置数量,具有自主航行和避障能力,智能程序设置能够进行抓取代价最小的水下的全局路径规划;
6、所述推进系统包括8个螺旋桨,与控制装置相连,安装在机架的顶部四周以及机架的四个角以不同方向放置,为保障灵活性轴向方向与水平轴夹角设置为45度,同时位于同一平面的四个螺旋桨轴线的法线相交与车体中心,接受控制系统的信息采用推进器实现悬浮车体结构的升沉进退姿态控制,平衡水力采集时的水射流产生造成的晃动。
7、进一步的,所述悬浮式采矿装备整体进行轻量化设计,应用具有优越抗海水腐蚀能力的轻质合金取代原有的钢材,以实现采矿装备减重,降低设计成本和开发周期,进一步降低浮力材料的消耗以及流体动力阻力,增强稳定性。
8、进一步的,所述车体升沉采用空气压缩与螺旋桨结合的方式,通过改变排水体积改变浮力大小以及螺旋桨的转向转速实现升沉。
9、进一步的,所述的8个螺旋桨可以实现0-95度的转动,用以实现集矿装备的前进后退以及转向功能,水力采集的同时进行一定幅度的转动,平衡水力采集时的水射流产生的力,减轻抓取难度,螺旋桨为大直径、慢转速,将其对海底环境的扰动降到最低。
10、进一步的,所述集矿机构包括水力采集结构、机械手、矿石收集箱,水力采集机构与大小机械手协同工作将结核采集至矿石收集箱;根据视觉系统传来的集矿区的结核的分布情况进行识别采集,密集程度较大的一定区域采用水力采集,在进行水力采集之前,识别大尺寸结核机械手抓取,减小射流量,减轻扰动;密集程度较小的区域采用多个机械手抓取,机械手可实现单个抓取以及聚类算法下的多个结核一次性抓取;位于车身的大机械手可同时采集偏离水力采集路径的结核以及集矿装备四周的结核,根据实际情况实现单一/组合式采集。
11、进一步的,所述水力采集机构包括水力捕捉系统、冲采喷嘴、射流管路、水力输送通道、抑羽流罩,采用双排喷嘴冲采的形式,抑羽流罩上部与位于抑羽流罩中心的水力输送通道相接,内部两侧设置冲采喷嘴与水力捕捉系统,水力捕捉系统精准确定结核,水射流提供升力,结核被剥离采集至矿石收集箱,抑羽流罩可减轻海底环境的影响并防止水力采集对机械手的工作造成影响。
12、进一步的,所述机械手分为大小机械手两种,大机械手位于车身,小机械手位于车体下部,包括固定座、方向调节装置、照明识别系统、驱动装置、机械臂ⅰ、机械臂ⅱ、多指联动抓取手;照明识别系统为机械手提供结核的距离、方向及位置信息;驱动装置包括舵机组件、密封壳体、联动装置,驱动电机ⅰ、驱动电机ⅱ,实现启、停,正转、反转动作及抓取手的开、合功能;多指联动抓取手采用镂空设计,减小抓取阻力提升抓取速度。
13、进一步的,所述的智能控制系统设计的能够获取周围图像信息,感知当前深度以及车体倾角,测量结核与采矿装备之间的距离以及采矿装备与海床面的距离,进行路径规划,并反馈给推进装置确定速度、加速度,保证采集平稳。
14、所述的一种深海机械手与水力采集一体化智能悬浮式采矿装备,其特征在于,所述的智能控制系统设定路径规划程序如下:
15、(1)采用聚类算法得到集矿机构需要采集结核的位置信息、数量,可根据目标抓取任务需要,对结核进行聚类,得到几个目标群,将目标群几何中心位作为目标点,一次性抓取,估计抓取时间,考虑碰撞风险代价和运动消耗代价,得到最优的抓取顺序;
16、(2)根据各个机械手的位置、总采集距离合理分配任务,使采集路径、采集消耗的代价、碰撞风险、对海底扰动最小,进行协同抓取路径规划,采用不同的策略进行抓取,提升系统协同抓取的效率;
17、(3)使用 lstm 网络对动态变化的目标进行预测,对海底环境信息进行修正,将采集海域融合到深度强化学习网络;结合海底洋流情况计算碰撞风险代价,得到风险地图,降低平均抓取代价;
18、(4)确定一条在整个抓取任务中,抓取结核数目最多,同时可以躲避海生物的长周期全局路径规划。
19、本发明的有益效果是:
20、1、本发明提供了多个位置机械手抓取与水力式采集协同组合的新型深海多金属结核采集装置,并考虑结核特性以及聚类算法进行工作分配优化,解决了单水力采集对海底扰动大,单机械手抓取效率低的问题,减轻水力采集流量,提供了智能、采集性能优良、对海底扰动小的技术与装备;
21、2、本发明提供了一种突破传统的海底行进集矿方式将采矿车由履带式改为浮游式,避免出现打滑沉陷等不良工况,集矿完成后集矿机构可回收,对海底扰动降低,防止羽流灾害的产生;
22、3、本发明水力采集配有结核捕捉系统以及羽流罩,降低结核采集的盲目性,降低沉积物扩散范围,解决了水力采集出现的扰动对机械手的抓取及视野感知产生影响导致的难题,车身机械手的设置同时可解决大尺寸结核出现角度偏移离开采集区域、周围结核遗漏的问题;
23、4、本发明采用具有优越抗海水腐蚀能力的轻质合金取代原有的钢材,以实现采矿装备减重,降低设计成本和开发周期,进一步降低浮力材料的消耗以及流体动力阻力,增强稳定性;
24、5、本发明采用空气压缩与螺旋桨推进器进行姿态控制,螺旋桨可正反转动,大直径、慢转速,保持平稳采集的同时降低螺旋桨的转动对海洋环境的扰动,角度平衡水射流对姿态造成的影响;
25、6、本发明考虑采矿车为悬浮式以及采矿船在海上的时长、海况,设定长周期全局采集路径规划,将深海采矿智能化。基于分析海底环境以及结核分布,进行采集任务分配与高效、安全的全局路径规划,解决了由于可视范围有限,视野模糊,对比度低,洋流扰动对影响采集过程以及机械手无法精确控制的难题,规划安全高效的路径,有效提升采集效率,降低能耗。
- 还没有人留言评论。精彩留言会获得点赞!