一种基于照明网络的室内混合定位装置、方法及系统与流程
本发明一种基于照明网络的室内混合定位装置、方法及系统,涉及煤矿工程领域。
背景技术:
1、现有的用于矿工人员的照明网络系统或方法存在以下不足:
2、1、环境对定位的影响:室内环境中可能存在反射、干扰等影响定位精度的因素,如墙壁、隔断等结构可能导致信号反射,影响定位的准确性。
3、2、系统复杂性:融合照明网络和其他传感器数据,需要复杂的算法和数据融合技术,增加了系统的设计、调试和维护成本。
4、3、部署和维护成本:照明系统可能需要进行智能化改造以支持定位功能,这需要额外的投入,同时需要长期的维护和管理。
5、照明网络系统或方法存在问题可能会给矿工人员带来信号覆盖不足、数据延迟、系统稳定性不强、误差较大等安全隐患。
技术实现思路
1、针对现有技术存在的不足,本发明目的是提供一种基于照明网络的室内混合定位装置、方法及系统,旨在解决矿工照明不安全的问题。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:一种基于照明网络的室内混合定位方法包括:
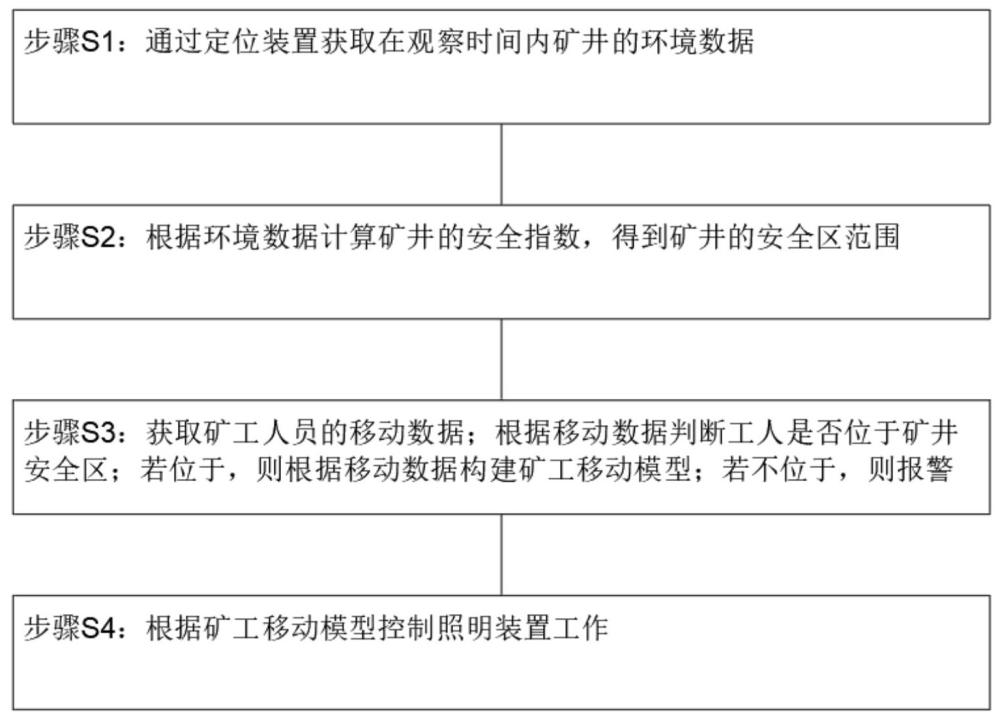
3、步骤s1:通过定位装置获取在观察时间内矿井的环境数据;
4、步骤s2:根据环境数据计算矿井的安全指数,得到矿井的安全区范围;
5、步骤s3:获取矿工人员的移动数据;根据移动数据判断工人是否位于矿井安全区;若位于,则根据移动数据构建矿工移动模型;若不位于,则报警;
6、步骤s4:根据矿工移动模型控制照明装置工作。
7、进一步地,所述步骤s1的步骤如下:
8、步骤s11:通过定位系统获取一级主控装置的位置,记作基点位置;
9、步骤s12:通过二级照明定位装置,获取各个二级照明定位装置距离一级主控装置的相对位置;
10、步骤s13:分别获取a区、b区、c区和d区对应的二级照明定位装置的个数;
11、步骤s14:通过二级照明定位装置,获取矿井垂直方向和水平方向对应的各矿洞或矿井的长度、宽度和高度;
12、步骤s15:通过二级照明定位装置,获取矿井内各矿洞内的氧气含量、水蒸气含量和有害气体含量;
13、步骤s16:把基点位置、相对位置、矿洞的长度、宽度和高度、氧气含量和有害气体含量,作为环境数据。
14、进一步地,所述步骤s2的步骤如下:
15、步骤s21:以“基点位置”为原点;以原点的正北方向为z轴,正东方向为y轴,垂直向下方向为z轴构建空间坐标系;
16、步骤s22:把二级照明定位装置的相对位置带入空间坐标系中;
17、步骤s23:分别统计a区、b区、c区和d区对应的二级照明定位装置的个数,记作an、bn、cn和dn;
18、步骤s24:计算a区的安全指数;
19、步骤s25:用计算a区的安全指数的相同执行步骤,依次计算b区、c区和d区对应的安全范围。
20、进一步地,所述步骤s24的步骤如下:
21、步骤s241:a区,把垂直向上正对原点的二级照明定位装置标号为1,按水平远离原点的方向依次对a区内所有的二级照明定位装置标号;
22、步骤s242:统计a区所有二级照明定位装置,对应的坐标数据和矿洞参数;
23、1,(x1,y1,z1),矿洞参数:l1、w1、h1;
24、2,(x2,y2,z2),矿洞参数:l2、w2、h2;
25、3,(x3,y3,z3),矿洞参数:l3、w3、h3;
26、an-1,(xan-1,yan-1,zan-1),矿洞参数:lan-1、wan-1、han-1;
27、an,(xan,yan,zan),矿洞参数:lan、wan、han;
28、步骤s243:把a区矿洞按二级照明定位装置的相邻位置,分为an-1个矿洞段;
29、第1个矿洞段:1~2;第2个矿洞段:2~3;第3个矿洞段:3~4;……第an-1个矿洞段:an-1~an;
30、步骤s244:统计每一个矿洞段在观察时间开始时和观察时间结束时,矿洞内的氧气含量、水蒸气含量和有害气体含量;分别记作ia1、ib1和ic1,ia2、ib2和ic2;
31、步骤s245:依次计算各矿洞段的气体安全指数ii;
32、第1个矿洞段:ii1~2的计算式如下:
33、;
34、第2个矿洞段:ii2~3的计算式如下:
35、;
36、第3个矿洞段:ii3~4的计算式如下:
37、;
38、以此类推,
39、第an-1个矿洞段:iian-1~an的计算式如下:
40、;
41、步骤s246:依次计算各矿洞段的位置安全指数d;
42、第1个矿洞段:d1~2的计算式如下:
43、;
44、第2个矿洞段:d2~3的计算式如下:
45、;
46、第3个矿洞段:d3~4的计算式如下:
47、;
48、以此类推,
49、第an-1个矿洞段:dan-1~an的计算式如下:
50、;
51、步骤s246:依次计算各矿洞段的环境安全指数sa;
52、第1个矿洞段:sa1~2的计算式如下:sa1~2=ii1~2*(1/d1~2);
53、第2个矿洞段:sa2~3的计算式如下:sa2~3=ii2~3*(1/d2~3);
54、第3个矿洞段:sa3~4的计算式如下:sa3~4=ii3~4*(1/d3~4);
55、以此类推,
56、第an-1个矿洞段:saan-1~an的计算式如下:saan-1~an=iian-1~an*(1/dan-1~an);
57、步骤s247:依次计算各矿洞的空间安全指数sp;
58、第1个矿洞段:sp1~2的计算式如下:sp1~2=(l2*w2*h2)-(l1*w1*h1);
59、第2个矿洞段:sp2~3的计算式如下:sp2~3=(l3*w3*h3)-(l2*w2*h2);
60、第3个矿洞段:sp3~4的计算式如下:sp3~4=(l4*w4*h4)-(l3*w3*h3);
61、以此类推,
62、第an-1个矿洞段:span-1~an的计算式如下:span-1~an=(lan*wan*han)-(lan-1*wan-1*han-1);
63、步骤s248:依次计算各矿洞的综合安全指数s;
64、第1个矿洞段:s1~2的计算式如下:s1~2=sa1~2*sp1~2;
65、第2个矿洞段:s2~3的计算式如下:s2~3=sa2~3*sp2~3;
66、第3个矿洞段:s3~4的计算式如下:s3~4=sp3~4*sp3~4;
67、以此类推,
68、第an-1个矿洞段:san-1~an的计算式如下:san-1~an=saan-1~an*span-1~an;
69、步骤s249:确定a区安全范围;
70、步骤s2491:把综合安全指数s按降序排列,得到集合ba;
71、步骤s2492:从集合ba的首项开始遍历,标记出第一个综合安全指数s小于或者等于0的矿洞段,记为终止项;
72、步骤s2493:把集合ba中从首项到终止项对应的矿洞段记为a区安全范围。
73、进一步地,所述步骤s3的步骤如下:
74、步骤s31:通过二级照明定位装置获取矿工人员的当前位置和当前时间;
75、步骤s32:判断矿工人员的当前位置是否位于安全区范围;若位于,则执行步骤s33,构建矿工移动模型;若不位于,则监测矿工的移动方向,二级照明定位装置进入警戒状态,执行步骤s34;
76、步骤s33:构建矿工移动模型;
77、步骤s331:把矿工人员当前位置代入上述步骤s21构建的空间坐标系中,得到矿工的起止位置坐标(x0,y0,z0);
78、步骤s332:通过二级照明定位装置,分别获取矿工人员在x轴、y轴和z轴上对应的各时刻的移动速度和移动加速度,分别记作vx、vy和vz,ax、ay和az;
79、步骤s333:把当前时间记作t0,构建矿工移动模型,其中t表示时间;
80、x轴移动;
81、;
82、y轴移动;
83、;
84、z轴移动;
85、;
86、步骤s34:选择距离矿工当前位置最近的安全区,作为第一安全区,获取矿工当前位置距离第一安全区的距离记作r;
87、步骤s35:利用步骤s331~步骤s332相同的方法,通过二级照明定位装置,获取矿工人员的当前位置(xx,yy,zz);矿工在x轴、y轴和z轴上对应的各时刻的移动速度和移动加速度,分别记作vvx、vvy和vvz,aax、aay和aaz;
88、步骤s36:计算矿工距离第一安全区的移动距离δr;
89、步骤s361:把vvx、vvy和vvz,aax、aay和aaz,代入步骤s333的公式中,计算xr、yr和zr;用vvx替换vx,vvy替换vy,vvz替换vz;用aax替换ax,aay替换ay,aaz替换az;
90、步骤s362:计算δr;
91、;
92、步骤s37:判断δr是否大于0;若δr大于0,则说明矿工正在接近第一安全区,二级照明定位装置维持警戒状态,直至矿工进入第一安全区;若δr小于或者等于0,则说明矿工正在远离第一安全区,二级照明定位装置维持警戒状态,执行步骤s38;
93、步骤s38:判断第一安全区周围是否存在安全区;若存在,则说明矿工正在接近安全区,二级照明定位装置维持警戒状态,直至矿工进入第一安全区;若不存在,则说明矿工正在远离安全区,二级照明定位装置由警戒状态变为报警状态,进行灯光和语音报警。
94、一种基于照明网络的室内混合定位系统,所述定位系统包括:
95、数据获取模块:用于获取矿井观察时间内矿井的环境数据;
96、数据处理模块:用于根据环境数据计算矿井的安全指数,得到矿井安全区范围;
97、人员监测模块:用于获取矿工人员的移动数据;根据移动数据判断工人是否位于矿井安全区;若位于,则不报警;若不位于,则报警;
98、照明装置综合控制模块:用于实时获取照明装置的灯具数据;根据移动数据和灯具数据调整照明装置。
99、进一步地,所述照明装置综合控制模块的流程如下:
100、流程a1:照明装置综合控制模块根据矿工移动数据调整照明装置;
101、流程a11:通过二级照明定位装置持续获取矿工相对于原点的位置数据、时间、速度数据和加速度数据;
102、流程a12:把流程a11获取的数据代入步骤s33构建矿工移动模型中,计算矿工的移动位置;
103、流程a13:依次控制矿工的移动位置区域对应的二级照明定位装置开启照明功能;
104、流程a2:照明装置综合控制模块关联一级主控装置和二级照明定位装置,通过步骤s11~步骤s12和步骤s21~步骤s24的方法,分别获取a区、b区、c区和d区所有二级照明定位装置的总个数和故障个数,得到灯具数据,分别记作ma、mb、mc和md,ua、ub、uc和ud;
105、流程a3:计算a区、b区、c区和d区的故障率n;na=ua/ma,nb=ub/mb,nc=uc/mc,nd=ud/md;
106、流程a4:判断a区的故障率na是否大于或者等于0.5;若故障率na大于或者等于0.5;则a区内所有二级照明定位装置全部进入警戒状态,语音播报矿工撤离信息,由灯具数据控制二级照明定位装置;若故障率na小于0.5;则a区内出现故障的二级照明定位装置进入警戒状态,其他二级照明定位装置不变,由移动数据控制二级照明定位装置;
107、流程a5:照明装置综合控制模块利用流程a4同样的方法,调整、b区、c区和d区的二级照明定位装置。
108、一种基于照明网络的室内混合定位装置包括:
109、一级主控装置和二级照明定位装置;其中一级主控装置搭载定位系统,安置在矿井上方的地面位置,用于联动二级照明定位装置;
110、二级照明定位装置包括:钉形固定式矿井照明定位装置和水平可移动式矿井照明定位装置;
111、钉形固定式矿井照明定位装置包括:
112、灯组、旋转组件、灯体、联动装置一、联动装置二和联动装置三;
113、旋转组件:用于矿工手动或系统自动调整灯组照射角度;
114、灯体:用于搭载灯组,包括多功能组件、电源选择器、语音播报组件、主电源和副电源;
115、多功能组件包括:气体检测组件,用于检测矿洞内的氧气、水蒸气和有害气体含量;录像识别组件,用于矿洞实时录像和识别矿洞录像中的矿工,若录像出现矿工则开启照明,若录像未出现矿工则关闭照明;测速组件,用于检测矿工的移动速度和移动加速度;定位组件,用于获取二级照明定位装置的相对位置;故障检测组件,用于检测灯组是否有电流通过,若有则说明灯组正常,若无,则说明灯组异常;
116、电源选择器:用于检测主电源的剩余带电量,若主电源的剩余带电量小于或者等于30%,则切换副电源;
117、联动装置一、联动装置二和联动装置三:用于将钉形固定式矿井照明定位装置固定在矿洞岩壁上;
118、水平可移动式矿井照明定位装置包括:
119、灯组、旋转组件、灯体、机械结构和基座;其中水平可移动式矿井照明定位装置的灯组、旋转组件和灯体与钉形固定式矿井照明定位装置对应的结构功能相同;所述机械结构,用于调整水平可移动式矿井照明定位装置灯组的高度;基座,用于水平可移动式矿井照明定位装置的移动。
120、与现有技术相比,本发明的有益效果是:
121、1、高精度定位:本发明可以实现对矿工在矿洞内位置的高精度定位,有助于矿工的安全监测和管理,特别是在紧急情况下能够快速准确地确定矿工的位置。
122、2、覆盖范围广:本发明可以覆盖整个矿井或矿洞内的区域,因此无需额外部署其他设备来实现定位功能,减少了系统的复杂性和部署成本。
123、3、实时性强:本发明可以提供实时的位置信息,矿工的位置变化可以实时监测和更新,方便管理人员了解矿工的当前位置和动态情况。
124、4、易于集成和管理:本发明通常部署在矿洞中,只需要对照明系统进行智能化改造,加入定位功能,不需要额外的硬件投入和设备维护;同时,基于网络的定位系统可以集中管理,便于配置和更新。
125、5、应急响应:本发明可以结合其他传感器,如烟雾、震动等,用于实时监测矿洞的环境状况,并及时发出警报和启动应急响应措施,保障矿工的安全。
- 还没有人留言评论。精彩留言会获得点赞!