一种翻转式抓管机械手及方法与流程
本发明涉及石油设备,尤其涉及一种翻转式抓管机械手及方法。
背景技术:
1、目前油田自动化钻井作业时,抓取钻杆一般都是先用游梁式猫道将钻杆输送到台面,再由顶驱通过吊环和液压吊卡将钻杆提升到鼠洞或井眼中心进行钻井或接立根作业;这种作业方式需台面辅助机械手、扶正臂、二层台排管机、顶驱共同协助完成钻具起下钻或钻机钻进作业流程,参与作业的自动化机具多,作业衔接点多,每柱钻具的起下钻时间一般都都大于等于3分钟,起下钻效率不高,而且游梁式猫道在高位时也存在倾覆的安全隐患,因此提出一种翻转式抓管机械手及方法,解决上述问题。
技术实现思路
1、本发明提供一种翻转式抓管机械手及方法,解决了上述技术问题。
2、为解决上述技术问题,本发明提供的一种翻转式抓管机械手及方法,包括安装座,所述安装座的上下两端分别转动连接有上连杆和下连杆,所述上连杆相对安装座的另一端转动连接有姿态杆,所述姿态杆相对上连杆的另一端转动连接有下连杆,所述上连杆的中部转动连接有举升油缸,所述举升油缸相对上连杆的另一端与安装座转动连接,所述上连杆靠近姿态杆的一端转动连接有翻转架,所述翻转架的中部转动连接有翻转油缸,所述翻转油缸相对翻转架的另一端与姿态杆连接,所述翻转架的下端固定有固定臂,所述固定臂的两侧分别滑动连接有伸缩臂,所述伸缩臂相对固定臂的另一端分别固定有上夹持钳和下夹持钳,所述固定臂的中部连接有伸缩油缸和浮动油缸且伸缩油缸和浮动油缸相向,所述伸缩油缸和浮动油缸的另一端分别与下夹持钳和伸缩臂连接,所述固定臂的底部固定有定位装置。
3、优选的,所述上夹持钳包括钳架,所述钳架的侧边转动连接有夹持油缸,所述夹持油缸相对钳架的另一端转动连接有夹持臂,所述夹持臂的中部与钳架转动连接,所述钳架的内部固定有探测机构,所述钳架的底部固定有钳牙座。
4、优选的,所述安装座和上连杆通过上左销轴和上右销轴连接,所述安装座和下连杆通过下右销轴和下左销轴连接。
5、优选的,所述举升油缸的两端通过油缸底部销轴和油缸顶部销轴分别与安装座和上连杆连接。
6、优选的,所述姿态杆通过左定位销轴和右定位销轴与上连杆连接,所述姿态杆通过右连接销轴和左连接销轴与下连杆连接。
7、与相关技术相比较,本发明提供的一种翻转式抓管机械手及方法具有如下有益效果:
8、1、本发明翻转式抓管机械手采用举升和翻转相结合的钻具处理方式,有效减少了自动化钻具处理设备,简化了作业流程,达到提高起下钻效率的问题。
9、2、本发明翻转式抓管机械手只需要配套低位水平输送猫道机,取消常规游梁式举升猫道机,避免了游梁式猫道在高位时存在的倾覆安全隐患以及管具从猫道掉落的作业风险。
技术特征:
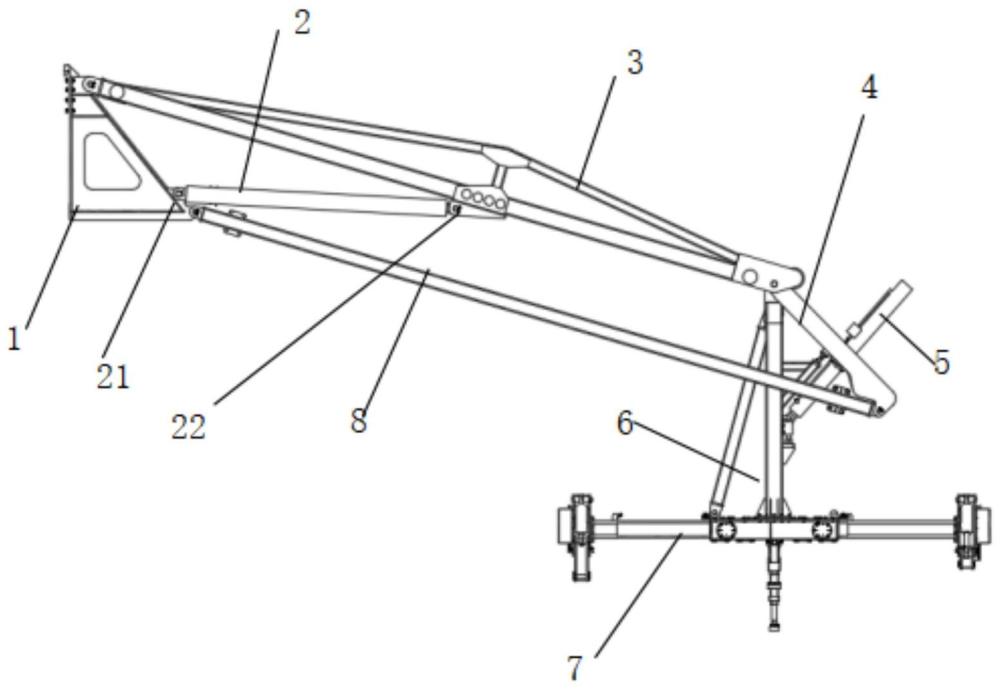
1.一种翻转式抓管机械手,包括安装座(1),其特征在于,所述安装座(1)的上下两端分别转动连接有上连杆(3)和下连杆(8),所述上连杆(3)相对安装座(1)的另一端转动连接有姿态杆(4),所述姿态杆(4)相对上连杆(3)的另一端转动连接有下连杆(8),所述上连杆(3)的中部转动连接有举升油缸(2),所述举升油缸(2)相对上连杆(3)的另一端与安装座(1)转动连接,所述上连杆(3)靠近姿态杆(4)的一端转动连接有翻转架(6),所述翻转架(6)的中部转动连接有翻转油缸(5),所述翻转油缸(5)相对翻转架(6)的另一端与姿态杆(4)连接,所述翻转架(6)的下端固定有固定臂(71),所述固定臂(71)的两侧分别滑动连接有伸缩臂(72),所述伸缩臂(72)相对固定臂(71)的另一端分别固定有上夹持钳(73)和下夹持钳(74),所述固定臂(71)的中部连接有伸缩油缸(75)和浮动油缸(76)且伸缩油缸(75)和浮动油缸(76)相向,所述伸缩油缸(75)和浮动油缸(76)的另一端分别与下夹持钳(74)和伸缩臂(72)连接,所述固定臂(71)的底部固定有定位装置(77)。
2.根据权利要求1所述的一种翻转式抓管机械手,其特征在于,所述上夹持钳(73)包括钳架(732),所述钳架(732)的侧边转动连接有夹持油缸(731),所述夹持油缸(731)相对钳架(732)的另一端转动连接有夹持臂(733),所述夹持臂(733)的中部与钳架(732)转动连接,所述钳架(732)的内部固定有探测机构(735),所述钳架(732)的底部固定有钳牙座(734)。
3.根据权利要求1所述的一种翻转式抓管机械手,其特征在于,所述安装座(1)和上连杆(3)通过上左销轴(11)和上右销轴(12)连接,所述安装座(1)和下连杆(8)通过下右销轴(13)和下左销轴(14)连接。
4.根据权利要求1所述的一种翻转式抓管机械手,其特征在于,所述举升油缸(2)的两端通过油缸底部销轴(21)和油缸顶部销轴(22)分别与安装座(1)和上连杆(3)连接。
5.根据权利要求1所述的一种翻转式抓管机械手,其特征在于,所述姿态杆(4)通过左定位销轴(41)和右定位销轴(42)与上连杆(3)连接,所述姿态杆(4)通过右连接销轴(43)和左连接销轴(44)与下连杆(8)连接。
6.根据权利要求1-5所述的一种钻杆举升的方法,其特征在于,通过翻转式抓管机械手对钻杆进行举升:
技术总结
本发明公开了一种翻转式抓管机械手及方法,涉及石油设备技术领域,包括安装座,所述安装座的上下两端分别转动连接有上连杆和下连杆,所述上连杆相对安装座的另一端转动连接有姿态杆,所述姿态杆相对上连杆的另一端转动连接有下连杆,所述上连杆的中部转动连接有举升油缸,所述举升油缸相对上连杆的另一端与安装座转动连接,所述上连杆靠近姿态杆的一端转动连接有翻转架,所述翻转架的中部转动连接有翻转油缸;本发明翻转式抓管机械手采用举升和翻转相结合的钻具处理方式,有效减少了自动化钻具处理设备,简化了作业流程,达到提高起下钻效率的问题。
技术研发人员:金运涛,唐慧兰,任伟,潘新春,吕泓博,王海波
受保护的技术使用者:上海浩铂海洋工程有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!