一种航空用燃料电池空气供应系统的建模与多目标控制方法
1.本发明属于航空电池技术领域,具体涉及一种燃料电池空气供应系统的建模与多目标控制方法。
背景技术:
2.在能源稀缺和环境污染的双重危机下,清洁与可再生能源的开发与利用日益成为社会关注的焦点。质子交换膜燃料电池(pemfc)因其能量密度高、启动时间短、红外特征弱、噪音小等优点,被认为是未来中低空领域最具有潜力的飞行器类型之一。在pemfc飞行器执行飞行任务时如加减速、巡航、上升下降时,高度及负载工况的显著变化对燃料电池系统的工作性能具有重要影响,具体影响可分为以下两个方面:一方面,飞行器加、减速及高度变化时将引起燃料电池阴极气压的波动,气压的剧烈波动将会破坏阴阳两极间气压平衡,导致电堆输出电压不稳定,降低燃料电池的可靠性。另一方面,随着飞行高度的增加,空气密度与氧含量降低,压缩机工作特性也发生改变,若此时空压机提供的氧气流量小于电化学反应所需的氧气流量,将导致氧饥饿现象的发生,进而降低燃料电池工作性能,严重时更会损毁质子交换膜,降低燃料电池寿命。阴极过氧比,指进入阴极的氧气的流量和阴极反应消耗的氧气流量的比值,通常用过氧比来衡量阴极供应空气流量的过量程度。因此,对阴极空气供应系统的模型以及气压和过氧比的变化特征进行深入研究对保证pemfc系统安全可靠高效的运行具有重要意义。
3.基于机理或数据的离心压缩机地面模型并未考虑空气温度、气压、密度、雷诺数等参数随高度变化的影响,因此无法应用在跨高度变工况的复杂条件下,如何在不同高度下构建离心压缩机精准的模型以及pemfc空气供应系统模型在国内航空领域仍处于空白。考虑负载工况的变化及高度改变下压缩机工作特性的变化,对燃料电池空气供应系统的气压、过氧比控制也不断提出更高的要求。提高系统气压、过氧比控制时的响应速度、超调等动静态性能指标,将直接改善空气供
4.应系统的性能,进而提升整个燃料电池系统的效率,如何实现跨高度条件下供气系统气压、过氧比的快速平稳控制是又一个亟待解决的关键难题。
技术实现要素:
5.为了克服现有技术的不足,本发明提供了一种航空用燃料电池空气供应系统的建模与多目标控制方法,首先基于压缩机运行机理及能量传输特性刻画了跨高度下离心压缩机动力学方程,而后建立了完整的空气供应系统进出气模型,其次,通过分析气压、过氧比控制的相互影响变化规律,设计模糊解耦控制器进行协调优化控制,大大改善了气压、过氧比同时控制时的动态性能。
6.本发明解决其技术问题所采用的技术方案包括如下步骤:
7.步骤1:通过对国际标准大气参数进行数据拟合建立压缩机入口气体温度、气压、空气密度的数学模型为:
8.h<5km
9.th=t
0-6.5*h/1000
10.ph=p0[1-(0.0065*h/t0)]
5.256
[0011]
ρh=phma/rth[0012]
其中,t0为海平面空气温度;p0为海平面空气压力;h表示海拔高度;th、ph分别为对应海拔高度下的空气温度和气压;ρh为该高度下的空气密度;ma为空气摩尔质量;r为气体常数;
[0013]
步骤2:建立跨高度条件下离心压缩机模型;
[0014]
基于热力学定律,压缩机特性方程为:
[0015]
δhs=δh
t-δh
i-δh
f-δh
other
[0016]
p
cp
=ph[1+(
△hs
/c
p
*th)]
γ/(γ-1)
[0017]
其中,δhs表示等熵压缩过程中滞止焓的增加量,δh
t
表示滞止焓总增加量,δhi表示入射损失焓增,δhf表示摩擦损失焓增,δh
other
表示压缩时其他损失焓增量的总和,p
cp
表示该高度下空压机输出空气的气压值,c
p
表示定压比热容,γ表示空气比热容比值;
[0018]
考虑在跨高度条件下,压缩机雷诺数数量级从106减小至103,故构建雷诺数与压缩机摩擦损失的数学模型为:
[0019]
叶轮摩擦损失
[0020]
扩散器摩擦损失其中,f=0.3164(re)-0.25
,f为平均雷诺数系数,re为雷诺数,re=d2u2ρh/gμ2,d2表示叶尖直径,u2表示叶片出口速度,μ2表示动力粘度,g表示重力加速度,li表示叶轮平均管道长度,w
cp
表示空压机输出的空气质量流量,di表示叶轮处平均液压管道直径,a1表示空压机叶轮眼处的面积,β
1b
表示转子叶片入口角度,ld表示扩散器平均管道长度,dd表示扩散器处的平均液压管道直径,α
2b
表示扩散器的进口角度;
[0021]
步骤3:构建燃料电池空气供应系统动态微分方程模型;
[0022]
具体分解为
①②③
三种形式,如公式(3)-(7)所示:
[0023]
①
压缩机出口的出口质量流量、压缩机出口气压及供气系统的供应歧管入口气压的动态关系为:
[0024][0025]
②
根据理想气体方程及孔口出流方程,供应/返回歧管内气压动态方程及流量动态方程如公式(4)、(5)所示:
[0026][0027]wout
=k
out
(p
in-p
out
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0028]
③
空气中的氧气到达燃料电池阴极时会发生化学反应,对应阴极的氧气、氮气的流量方程如公式(6)、(7)所示:
[0029][0030][0031]
其中,lc表示四相ibc输出电感,p
sm
表示阴极供应歧管内的气压,p
man
表示歧管内气压,t
man
表示歧管内温度,v
man
表示供应歧管体积,w
in
表示供应歧管入口处的空气流量,w
out
表示供应歧管出口处的空气质量流量,k
out
表示供应歧管流量系数,p
in
表示供应歧管内的气压,p
out
表示电堆阴极气压,表示阴极流道内的氧气分压,t
st
表示电堆温度,表示阴极流道内的氧气质量流量,v
ca
表示阴极容腔体积,表示进入阴极的氧气质量流量,表示离开阴极的氧气质量流量,表示阴极参与反应消耗的氧气质量流量,表示阴极流道内的氮气分压,表示阴极流道内的氮气质量流量,表示进入阴极的氮气质量流量,表示离开阴极的氮气质量流量;
[0032]
步骤4:进行未解耦条件下的气压、过氧比多目标控制器设计;
[0033]
采用阶跃响应条件下系统辨识的方法获取基于开口面积/转速-气压/过氧比的双输入双输出空气供应系统简化传递函数方程,如公式(8)所示:
[0034][0035]
其中,p
ca
表示阴极气压,表示过氧比,[g
11
(s),g
12
(s);g
21
(s),g
22
(s)]表示该系统的矩阵传递函数,ad
rm
表示返回歧管阀门开口面积,ω
cp
表示空压机转速;
[0036]
步骤5:进行气压、过氧比多目标模糊解耦控制器设计;
[0037]
基于前馈补偿解耦控制原理,保证气压、过氧比控制过程中满足方程(9):
[0038][0039]
燃料电池空气供应系统是一个强非线性系统,根据压缩机气压和过氧比控制的需求设计动态解耦控制器,动态解耦控制器为模糊解耦控制器,模糊解耦控制器的模糊规则制定原理:
[0040]ⅰ.当需求流量减小时,为维持过氧比,需降低转速减小供应流量,此时气压也会降低,因此需要提前减小阀门开口面积以增大气压;
[0041]ⅱ.当实际气压无法维持参考气压时,需减小阀门开度增大气压,此时实际供应空气流量也会降低,因此需要提前增大转速以增大供应流量。
[0042]
本发明的有益效果如下:
[0043]
本发明在执行跨高度飞行任务时,考虑环境因素空气温度、气压、密度以及压缩机空气动力学参数雷诺数等的改变,模拟了压缩机在不同高度下的工作特性并构建了空气供应系统模型,最终实现在跨高度和加减速、巡航、上升、下降等多工况条件下的pemfc空气供应系统的气压、过氧比的快速平稳控制。通过仿真分析验证,设计的模糊解耦控制器相比未
解耦控制器,在同时控制气压和过氧比时具有良好的动态特性,达到了过氧比的快速调节以及过氧比波动减小10%、气压波动小于1kpa的效果,大大削弱了气压或过氧比波动时,对另一个控制目标的影响。
附图说明
[0044]
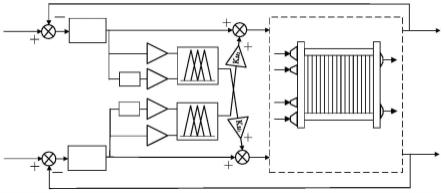
图1为本发明燃料电池空气供应系统气压、过氧比解耦控制系统框图。
[0045]
图2为本发明0km、3km高度下压缩机气压-流量-转速三维曲面图,其中,(a)0km压缩机特性曲面图,(b)3km压缩机特性曲面图。
[0046]
图3为本发明模糊解耦控制器的气压、过氧比控制输入输出变量隶属度函数图,其中,(a)气压的隶属度函数,(b)过氧比的隶属度函数。
[0047]
图4为本发明未解耦与解耦控制下气压控制效果对比图,其中(a)完整仿真时间内气压控制效果图,(b)第75s下降时气压控制放大图,(c)第87.5s巡航时气压控制放大图。
[0048]
图5为本发明未解耦与解耦控制下过氧比控制效果对比图,其中,(a)完整仿真时间内过氧比控制效果图,(b)第65s扰动条件下过氧比控制放大图,(c)第92s气压扰动时过氧比控制放大图。
具体实施方式
[0049]
下面结合附图和实施例对本发明进一步说明。
[0050]
本发明的目的在于提供一种可用于跨高度条件下的燃料电池空气供应系统机理建模方法及气压、过氧比控制的解耦控制方案。其中,针对空气供应系统的多维控制目标与解耦策略的关系展开分析研究,最终实现气压、过氧比的快速平稳控制。
[0051]
一种航空用燃料电池空气供应系统的建模与多目标控制方法,包括如下步骤:
[0052]
步骤1:通过对国际标准大气参数进行数据拟合建立压缩机入口气体温度、气压、空气密度的数学模型为:
[0053]
h<5km
[0054]
th=t
0-6.5*h/1000
[0055]
ph=p0[1-(0.0065*h/t0)]
5.256
[0056]
ρh=phma/rth[0057]
其中,t0为海平面空气温度;p0为海平面空气压力;h表示海拔高度;th、ph分别为对应海拔高度下的空气温度和气压;ρh为该高度下的空气密度;ma为空气摩尔质量;r为气体常数;
[0058]
步骤2:建立跨高度条件下离心压缩机模型;
[0059]
基于热力学定律,压缩机特性方程为:
[0060]
δhs=δh
t-δh
i-δh
f-δh
other
[0061]
p
cp
=ph[1+(
△hs
/c
p
*th)]
γ/(γ-1)
[0062]
考虑在跨高度条件下,压缩机雷诺数数量级从106减小至103,故构建雷诺数与压缩机摩擦损失的数学模型为:
[0063]
叶轮摩擦损失
[0064]
扩散器摩擦损失其中,f=0.3164(re)-0.25
,f为平均雷诺数系数,re为雷诺数,re=d2u2ρh/gμ2,d2表示叶尖直径,u2表示叶片出口速度,μ2表示动力粘度,g表示重力加速度;
[0065]
步骤3:构建燃料电池空气供应系统动态微分方程模型;
[0066]
具体分解为
①②③
三种形式,如公式(3)-(7)所示:
[0067]
①
压缩机出口的出口质量流量、压缩机出口气压及供气系统的供应歧管入口气压的动态关系为:
[0068][0069]
②
根据理想气体方程及孔口出流方程,供应/返回歧管内气压动态方程及流量动态方程如公式(4)、(5)所示:
[0070][0071]wout
=k
out
(p
in-p
out
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0072]
③
空气中的氧气到达燃料电池阴极时会发生化学反应,对应阴极的氧气、氮气的流量方程如公式(6)、(7)所示:
[0073][0074][0075]
步骤4:进行未解耦条件下的气压、过氧比多目标控制器设计;
[0076]
采用阶跃响应条件下系统辨识的方法获取基于开口面积/转速-气压/过氧比的双输入双输出空气供应系统简化传递函数方程,如公式(8)所示:
[0077][0078]
步骤5:进行气压、过氧比多目标模糊解耦控制器设计;
[0079]
基于前馈补偿解耦控制原理,保证气压、过氧比控制过程中满足方程(9):
[0080][0081]
燃料电池空气供应系统是一个强非线性系统,根据压缩机气压和过氧比控制的需求设计动态解耦控制器,动态解耦控制器为模糊解耦控制器,模糊解耦控制器的模糊规则制定原理:
[0082]ⅰ.当需求流量减小时,为维持过氧比,需降低转速减小供应流量,此时气压也会降低,因此需要提前减小阀门开口面积以增大气压;
[0083]ⅱ.当实际气压无法维持参考气压时,需减小阀门开度增大气压,此时实际供应空
气流量也会降低,因此需要提前增大转速以增大供应流量。
[0084]
具体实施例:
[0085]
本发明实施例的航空用燃料电池发电系统的空气供应系统,包括压缩机、供气歧管、加湿冷凝器、燃料电池、返回歧管等。为提高燃料电池系统的效率和使用性能,采用超高速离心压缩机提供高压比的空气流量,压缩机驱动电机为无刷直流电机,最大功率为1kw,最高转速为28
×
104r/min,输出压比最大为1.7倍。
[0086]
本发明实施例着重考虑高度变化时,离心压缩机的工作特性与空气温度、气压、密度、雷诺数等可变参数的影响关系。此外,通过构建完整的空气供应系统进出气模型,为燃料电池的气压、过氧比控制奠定基础。
[0087]
本发明实施例的燃料电池空气供应系统是一个具有多输入-多输出的强非线性耦合系统,通过合理简化空气供应系统模型,并采用基于前馈模糊解耦的方法协调优化控制气压、过氧比,提高了系统在复杂环境和多变工况下的动静态能力。
[0088]
一种航空用燃料电池空气供应系统的建模与控制方法,具体按照以下步骤实施:
[0089]
1、考虑随高度变化时,空气温度、气压和密度等环境参数会随高度成近似线性或非线性变化,通过对国际标准大气参数进行数据拟合并建立压缩机入口大气环境模型。压缩机入口气体温度、气压、空气密度的数学模型为(h<5km):th=t
0-6.5*h/1000、ph=p0[1-(0.0065*h/t0)]
5.256
、ρh=phma/rth。其中,t0为海平面空气温度,k;p0为海平面空气压力,atm;h表示海拔高度,km;th、ph分别为对应海拔高度下的空气温度和气压;ρh为该高度下的空气密度,kg/m3;ma为空气摩尔质量,kg/mol;r为气体常数,j/(mol
·
k)。
[0090]
2、建立跨高度条件下离心压缩机模型;
[0091]
根据压缩机运行机理及能量传输特性,并考虑跨高度飞行时,空气温度、气压、温度等环境参数线性或非线性变化以及运动粘度、雷诺数等气动参数改变,对压缩机输入总能量和冲击损失、摩擦损失等能量损失造成的热能损耗的影响,基于热力学定律的分析计算,压缩机特性方程为:
[0092]
△hs
=
△ht
‑△hi
‑△
hf‑△hother
[0093]
p
cp
=ph[1+(
△hs
/c
p
*th)]
γ/(γ-1)
[0094]
考虑在跨高度条件下,压缩机雷诺数数量级从106减小至103,进而显著影响摩擦损失的大小,故此处构建雷诺数与压缩机摩擦损失的数学模型为:
[0095]
叶轮摩擦损失:
[0096]
扩散器摩擦损失:其中,f=0.3164(re)-0.25
,f为平均雷诺数系数,re为雷诺数。re与叶尖直径d2,叶片出口速度u2,动力粘度μ2,空气密度等均有关,可表示为re=d2u2ρh/gμ2。
[0097]
基于跨高度下的压缩机特性方程,0m及3km下的压缩机气压-流量-转速三维曲面图如图2所示。
[0098]
3、构建燃料电池空气供应系统动态微分方程模型;
[0099]
压缩机吸入的高压比空气流量,将经过供气歧管、加湿器、冷凝器这些主要部件进入燃料电池阴极发生还原反应,之后经过出口返回歧管排出气体。为精确描述燃料电池空
气供应系统中气体的流动特征并为后续控制器设计的定性、定量分析考虑,构建了空气供应系统多阶状态空间方程模型,气体流动方程具体可分解为
①②③
三种形式,如公式(3)-(7)所示:
[0100]
①
压缩机出口与供气系统的供应歧管相连,其出口质量流量与压缩机出口气压及供应歧管入口气压的动态关系为:
[0101][0102]
②
根据理想气体方程及孔口出流方程,供应/返回歧管内气压动态方程及流量动态方程如公式(4)、(5)所示,
[0103][0104]wout
=k
out
(p
in-p
out
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0105]
③
空气(氧气)到达燃料电池阴极时会发生化学反应,对应阴极的氧气、氮气的流量方程如公式(6)、(7)所示:
[0106][0107][0108]
4、进行未解耦条件下的气压、过氧比多目标控制器设计;
[0109]
当飞行器爬升/下降时需要消耗更多/更少空气流量,引起实际过氧比小于/大于参考值,其他工况可类似参考引起实际气压或过氧比的变化。采用相对增益矩阵的方法可分析得到,采用pi控制改变阀门开口面积控制阴极内气压大小与通过pi调节压缩机转速调节供应空气质量流量时,气压、过氧比控制存在相互影响。此外,经过阶跃响应条件下系统辨识的方法可获取基于开口面积/转速-气压/过氧比的双输入双输出空气供应系统简化传递函数方程,如公式(8)所示:
[0110][0111]
5、进行气压、过氧比多目标模糊解耦控制器设计及仿真效果分析;
[0112]
基于前馈补偿解耦控制原理,要实现气压、过氧比控制过程中,调节气压时过氧比基本不变,过氧比波动时气压近似不变,须保证气压、过氧比控制过程中满足方程(9):
[0113][0114]
然而,燃料电池空气供应系统是一个强非线性系统,尤其在跨高度条件下传统的静态解耦控制器可能带来负面影响,可根据压缩机气压和过氧比控制的需求设计动态解耦控制器,系统控制结构如图1所示。因模糊控制具有模型依赖性低、自适应的特点,可根据专家经验结合压缩机工作特性如压缩机在低压区时改变流量气压变化小,在阀门开口面积相对较小的条件下改变阀门面积对流量的影响大体不变等进行模糊规则、隶属度函数等模糊
控制器设计,隶属度函数如图3所示。
[0115]
模糊规则制定原理:
[0116]ⅰ.当需求流量减小时,为维持过氧比,需降低转速减小供应流量,此时气压也会降低,因此需要提前适当减小阀门开口面积以增大气压;
[0117]ⅱ.当实际气压过低无法维持参考气压时,需减小阀门开度增大气压,此时实际供应空气流量也会降低,因此需要提前适当增大转速以增大供应流量。
[0118]
设计的未解耦与解耦控制下气压控制效果对比图与未解耦与解耦控制下过氧比控制效果对比图如图4和图5所示。通过仿真分析验证,设计的模糊解耦控制器相比未解耦控制器,在同时控制气压和过氧比时具有良好的动态特性,达到了过氧比的快速调节以及过氧比波动减小10%、气压波动小于1kpa的效果,大大削弱了气压或过氧比波动时,对另一个控制目标的影响。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1