一种适用于大型结构物对接安装的对接平面监测及调整方法
1.本发明涉及一种平面监测及调整方法,尤其涉及一种适用于大型结构物对接安装的对接平面监测及调整方法。
背景技术:
2.随着世界经济的持续发展,国内外石油的需求量日益提升,海洋石油事业不断发展,海上石油平台、导管架、fpso等都想着大型化发展,各类钢结构的尺寸和重量也在日益增大,对接安装过承中,大型结构物的顶升点的位置存在较大的变形,成为对接过程中不能忽略的因素,使这些钢结构的对接安装的难度也在不断加大,传统的位姿监测方法采用激光雷达对大型结构物进行监测,检测精度差,设备成本高,环境适性差,同时姿态调整过程中未考虑大型模块底部顶升点的受力变形,没有对应的变形补偿措施,严重影响了大型结构物的对接精度,不能满足实际工程需求,因此急需一种可以高精度、高经济性、高实用性的大型结构对接安装的对接平面监测及调整方法。
技术实现要素:
3.本发明方法克服了已有技术的缺点,提供一种适用于大型结构物对接安装的对接平面监测及调整方法。
4.本发明一种适用于大型结构物对接安装的对接平面监测及调整方法,包括以下步骤:
5.步骤一:给每个液压缸安装拉丝位移传感器、距离传感器和压力传感器构建液压缸组,构建并布置液压缸组,具体操作如下:
6.第一步,将拉丝传感器的外壳和测量端分别固定于液压缸缸筒外壁和液压缸活塞杆顶部,用于检测液压油缸活塞杆的位移,将两个压力传感器分别与液压油缸的无杆腔和有杆腔连接,用于检测液压油缸的压力,将两个距离传感器和活动固定与液压i的外壁,两个距离传感器可绕液压缸外壁旋转,用于检测液压缸之间的距离。
7.第二步,将4个液压缸液压缸组成一个液压缸组,利用距离传感器测量相邻两个液压缸的距离,调整相邻两个液压缸的距离,令相邻两个液压缸的距离相等。
8.第三步,将多个液压缸组布置在大型结构物下方,使每个液压缸组的中心与大型结构物的每一个对节平面在地面的投影中心重合。
9.步骤二:将大型结构物顶升到待对接高度,通过三维激光扫描仪对大型结构物进行遍历扫描并将扫描到的结果输入到计算机,建立大型结构物虚拟三维模型并进行材料定义,具体步骤为:
10.第一步,多个液压缸组同时顶升将大型结构物顶升到对接高度,使用三维激光扫描仪遍历扫描大型结构,将获取的点云数据导入计算机并进行降噪等预处理工作。
11.第二步,将经过上一步预处理的大型结构物点云数据导入leica cyclone软件,调用软件数据拟合功能处理导入的点云数据,得到初始三维模型,并保存为sldprt文件。
12.第三步,在solidworks软件中打第二步中得到的sldprt格式文件,通过solidworks软件中的定义材料功能,编辑大型结构物三维模型中各部分材料属性,将完成材料定义的大型结构物三维模型保存分别保存为sldprt格式文件和x_t格式文件。
13.步骤三:将步骤二的第三步中得到的sldprt格式文件导入solidworks软件中进行测量,得到顶升点位移补偿值,具体步骤为:
14.第一步,测量对接平面下方的液压缸组的每个液压缸的中心点在对接平面的投影点的坐标。
15.第二步,计算得到对接平面下方的液压缸组的四个液压缸的位移补偿值。
16.第三步,重复上两步直到对所有对接平面完成上述操作。
17.步骤四:计算每个液压缸的顶升力,将步骤二的第三步中得到的x_t格式文件导入ansys worksbench软件中分析大型结构物顶升点的形变情况,具体步骤为:
18.第一步,测得液压缸组的每个液压缸的无杆腔压力传感器的读数,每个液压缸的有杆腔压力传感器读数,计算可得每个液压缸的顶升力。
19.第二步,重复上一步直到对所有液压缸组完成上述操作。
20.第三步,在ansys worksbench软件中打开步骤二的第三步中得到的x_t格式文件,在大型结构物三维模型的底面添加作用力,作用力的位置与每个液压缸在大型结构物底面的作用位置对应,作用力方向向上,作用力的大小等于每一个顶升点处的液压缸的顶升力,进行静力学分析得到,得到每个液压缸顶升点处的形变量。
21.步骤五:计算每一个液压缸的运动补偿量,进行顶升调整工作,具体步骤如下:
22.第一步,计算得到液压缸组的液压缸的运动补偿量。
23.第二步,重复上一步直到对所有液压缸完成上述操作。
24.第三步,液压缸同时进行顶升,控制每个液压缸的运动补偿量为上一步计算所得值。
25.本发明的有益效果是通过三维激光扫描仪对对接平面姿态进行监测,提高监测精度和可靠性;对大型结构物进行有限元分析,考虑到实际工作中的变形情况,综合考虑各种因素对对接精度影响因素;计算方法简单可靠,数据处理效率高,是一种操作简单、安全可靠、监测精度高、对接精度高的方法。
附图说明
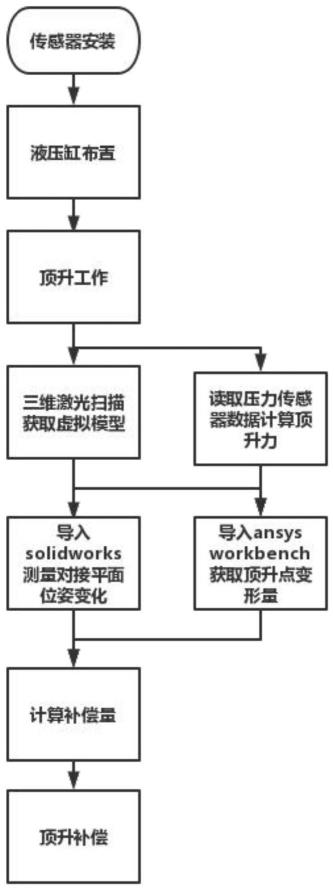
26.图1为一种适用于大型结构物对接安装的对接平面监测及调整方法流程图;
27.图2为大型结构物对接安装过程正视图;
28.图3为大型结构物对接安装过程俯视图;
29.图2中:1-大型结构物;2-液压缸;3-对接平面;
具体实施方式
30.下面结合附图和具体实施例对本发明加以详细说明:
31.以下是本发明的具体实施例,对本发明的技术方案作进一步的描述:
32.步骤一:给每个液压缸安装拉丝位移传感器、距离传感器和压力传感器构建液压缸组,构建并布置液压缸组,具体操作如下:
33.第一步,将拉丝传感器hi的外壳和测量端分别固定于液压缸缸筒外壁和液压缸i活塞杆顶部,用于检测液压油缸活塞杆的位移,将两个压力传感器p
hi
和p
li
分别与液压油缸i的无杆腔和有杆腔连接,用于检测液压油缸的压力,将两个距离传感器l
ri
和l
li
活动固定与液压缸i的外壁,两个距离传感器可绕液压缸外壁旋转,用于检测液压缸之间的距离。
34.第二步,将4个液压缸液压缸组成一个液压缸组,利用距离传感器测量相邻两个液压缸的距离,测得距离数据l
r1
、l
l1
、l
r2
、l
l2
、l
r3
、l
l3
、l
r4
、l
l4
,调整相邻两个液压缸的距离,令l
r1
=l
l1
=l
r2
=l
l2
=l
r3
=l
l3
=l
r4
=l
l4
=l,l为设定间距值。
35.第三步,将多个液压缸组布置在大型结构物下方,使每个液压缸组的中心与大型结构物的每一个对节平面在地面的投影中心重合。
36.步骤二:将大型结构物顶升到待对接高度,通过三维激光扫描仪对大型结构物进行遍历扫描并将扫描到的结果输入到计算机,建立大型结构物虚拟三维模型并进行材料定义,具体步骤为:
37.第一步,多个液压缸组同时顶升将大型结构物顶升到对接高度,使用三维激光扫描仪遍历扫描大型结构,将获取的点云数据导入计算机并进行降噪等预处理工作。
38.第二步,将经过上一步预处理的大型结构物点云数据导入leica cyclone软件,调用软件数据拟合功能处理导入的点云数据,得到初始三维模型,并保存为sldprt文件。
39.第三步,在solidworks软件中打第二步中得到的sldprt格式文件,通过solidworks软件中的定义材料功能,编辑大型结构物三维模型中各部分材料属性,将完成材料定义的大型结构物三维模型保存分别保存为sldprt格式文件和x_t格式文件。
40.步骤三:将步骤二的第三步中得到的sldprt格式文件导入solidworks软件中进行测量,得到顶升点位移补偿值,具体步骤为:
41.第一步,测量第i个对接平面下方的液压缸组的每个液压缸的中心点在对接平面的投影点的坐标,四点坐标分别为(x
i1
,y
i1
,z
i1
)、(x
i2
,y
i2
,z
i2
)、(x
i3
,y
i3
,z
i3
)、(x
i4
,y
i4
,z
i4
)。
42.第二步,令z
imin
=min(z
i1
、z
i2
、z
i3
、z
i4
),其中min(z
i1
、z
i2
、z
i3
、z
i4
)表示z
i1
、z
i2
、z
i3
、z
i4
中的最小值,计算得到第i个对接平面下方的液压缸组的四个液压缸的位移补偿值z
i1
、z
i2
、z
i3
、z
i4
。
43.第三步,重复上两步直到对所有对接平面完成上述操作。
44.步骤四:计算每个液压缸的顶升力,将步骤二的第三步中得到的x_t格式文件导入ansys worksbench软件中分析大型结构物顶升点的形变情况,具体步骤为:
45.第一步,测得第i个液压缸组的每个液压缸的无杆腔压力传感器的读数分别为p
ih1
、p
ih2
、p
ih3
、p
ih4
,每个液压缸的有杆腔压力传感器读数分别为p
il1
、p
il2
、p
il3
、p
il4
,计算可得每个液压缸的顶升力为f
i1
、f
i2
、f
i3
、f
i4
,其中:
[0046][0047]
式中,s1、s2分别为液压缸有杆腔和无杆腔的截面积;
[0048]
第二步,重复上一步直到对所有液压缸组完成上述操作。
[0049]
第三步,在ansys worksbench软件中打开步骤二的第三步中得到的x_t格式文件,
在大型结构物三维模型的底面添加作用力,作用力的位置与每个液压缸在大型结构物底面的作用位置对应,作用力方向向上,作用力的大小等于每一个顶升点处的液压缸的顶升力,进行静力学分析得到,得到每个液压缸顶升点处的形变量δ
ii
,δ
ii
表示第i组液压缸的第i个液压缸对应的顶升点的形变量。
[0050]
步骤五:计算每一个液压缸的运动补偿量,进行顶升调整工作,具体步骤如下:
[0051]
第一步,计算得到第i个液压缸组的第i个液压缸的运动补偿量ε
ii
,其中:
[0052]
ε
ii
=z
ii
+δ
ii
[0053]
式中,z
ii
表示第i个液压缸组的第i个液压缸的位移补偿值;
[0054]
第二步,重复上一步直到对所有液压缸完成上述操作。
[0055]
第三步,液压缸同时进行顶升,控制第i个液压缸组的第i个液压缸的运动补偿量为ε
ii
。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1