一种轴向磁悬浮压缩机系统的制作方法
1.本技术涉及压缩机领域,尤其是涉及一种轴向磁悬浮压缩机系统。
背景技术:
2.蒸发、蒸馏等干燥设备是化工企业常用的能量密集型设备,其中机械蒸发在压缩技术可有效降低单位能耗,蒸汽在分离器产生的二次蒸汽通过压缩机压缩,使其压力、温度上升增加热焓,在重新回到分离器中作为蒸发热源。
3.现有授权公告号为cn106438397b的中国专利公开了一种离心蒸汽压缩机,包括底座、驱动电机、蜗壳和齿轮箱,齿轮箱一侧安装有蜗壳,蜗壳内设有叶轮,叶轮的一端与齿轮箱内设置的主轴(下文统称为主轴)连接,主轴上固定连接有从动齿轮,齿轮箱内还设置有驱动轴,驱动轴上设置有与从动齿轮相啮合的主动齿轮,驱动轴的输出端连接有驱动电机;在工作时,启动驱动电机带动驱动轴转动,主轴在相互啮合的从动齿轮和主动齿轮的带动下转动,进而带动叶轮转动,将蜗壳与分离器输出端相连器,即可使得分离器产生的二次蒸汽通入蜗壳内,二次蒸汽将在高速旋转的叶轮带动下增压增温,最终增压增温的蒸汽通过蜗壳排出,重新进入蒸汽循环中。
4.针对上述中的相关技术,发明人发现上述通过从动齿轮、主动齿轮相互啮合的方式来带动主轴转动,而由于压缩机中的主轴一般为几万转速的高速旋转形式,上述主动齿轮和从动齿轮在啮合转动过程中极易出现磨损而造成压缩机内部驱动结构需要频繁维护的情况,为此上述驱动方式的使用效果不佳。
技术实现要素:
5.为了现有压缩机中的主轴驱动结构易磨损而需要频繁维护的技术问题,本技术提供一种轴向磁悬浮压缩机系统。
6.本技术提供的一种轴向磁悬浮压缩机系统,采用如下的技术方案:一种轴向磁悬浮压缩机系统,包括壳体,转动连接于壳体内的叶轮和主轴,以及用于驱动主轴转动的驱动组件,所述壳体内还设置有用于支撑主轴的磁悬浮支撑模组,以及用于监测主轴是否偏离指定位置的位置监测模组,所述磁悬浮支撑模组包括磁悬浮轴承,所述磁悬浮支撑模组和位置监测模组均受控于控制器;所述控制器用于获取所述位置监测模组的监测结果,并在主轴偏离指定位置时,控制磁悬浮支撑模组将主轴重新调整至所述指定位置。
7.通过采用上述技术方案,与现有技术相比,磁悬浮轴承与主轴为无机械接触的连接方式,从而免除了与主轴接触产生的摩擦而产生的磨损、免润滑,相对接触类轴承降低了功耗,延长了压缩机系统的整体使用寿命。
8.作为优选,所述位置监测模组包括主轴偏移监测模块,以及偏移位置确定模块;所述主轴偏移监测模块用于监测主轴边沿是否位于预设的监测范围内,并在不处于监测范围时,向所述控制器发出偏移信号;
所述控制器用于在接收到偏移信号时,向所述偏移位置确定模块发出定位信号;所述偏移位置确定模块用于在接收到所述定位信号时,确定所述主轴当前的位置信息,并将所述位置信息反馈至所述控制器。
9.通过采用上述技术方案,通过主轴偏移检测模块对主轴的边沿进行监测,一旦主轴的边沿脱离检测范围,那么主轴势必偏离了指定位置,此时控制器将接收到偏移信号,只有在接收到偏移信号时,控制器才会向偏移位置确定模块发送定位信号,以用于确定主轴当前的位置信息。
10.作为优选,所述位置监测模组还包括基准板,以及设置于基准板上的若干个基准杆,处于所述指定位置时的所述主轴长度方向平行于基准杆长度方向,且处于所述指定位置时的主轴端部贴合于所有基准杆端部,每一所述基准杆均沿其长度方向滑移连接于基准板上;所述偏移位置确定模块包括基准杆位置监测单元和主轴位置监测单元;所述基准杆位置监测单元用于在接收到所述定位信号时,监测每一所述基准杆是否相对初始位置出现滑移的情况,并将滑移情况发送至控制器;所述控制器包括偏移类型确定模块、位置信息获取模块以及主轴位置修正模块;所述偏移类型确定模块用于接收所述基准杆位置监测单元所监测的滑移情况,并基于所述滑移情况确定主轴偏移类型;所述位置信息获取模块用于基于所述主轴偏移类型向所述主轴位置监测单元发送监测指令,以使得所述主轴位置监测单元监测并回传所述主轴当前的位置信息;所述主轴位置修正模块用于基于所述主轴的位置信息控制磁悬浮支撑模组将所述主轴调整至所述指定位置。
11.通过采用上述技术方案,当主轴处于指定位置时,即未偏移时,主轴端壁与所有基准杆端部处于贴合状态,此时所有基准杆的的位置则为初始位置,当主轴偏移监测模块监测到主轴边沿偏移初始位置时,可以先确定主轴的偏移类型,偏移类型可以包括径向偏移和非径向偏移,如径向偏移指主轴虽然出现了偏移,但是主轴的轴线方向始终平行于主轴处于指定位置时所对应的轴线方向,而非径向偏移则指偏移后的主轴的轴线方向不平行于主轴处于指定位置时所对应的轴线方向,相应的,若主轴偏移类型为非径向偏移,那么主轴端部势必会推动其中的某一部分基准杆,以使得基准杆滑移,为此,本技术特通过设置基准杆以及基准杆位置监测单元来判定主轴的偏移类型,以便通过上述偏移类型来方便主轴位置修正模块控制磁悬浮支撑模组对主轴的修正操作。
12.作为优选,所述偏移类型包括径向偏移和非径向偏移,所述主轴位置监测单元包括摄像子单元以及测距子单元;所述摄像子单元用于拍摄带有所述主轴端部的图像,并将所述图像发送至位置信息获取模块;所述主轴每一端均对应一组所述测距子单元,位于同一端的所述测距子单元沿主轴周向均匀排布,所述测距子单元用于检测其与主轴的距离数据,并将距离数据发送至位置信息获取模块。
13.所述位置信息获取模块用于在所述偏移类型为径向偏移时,向所述摄像子单元发送监测指令;还用于在所述偏移类型为非径向偏移时,向所述测距子单元发送监测指令;所述位置信息获取模块还用于在接收到所述摄像子单元所拍摄的图像时,确定所述主轴轴心在图像中的位置坐标;所述主轴位置修正模块用于基于所述位置坐标或所述距离数据,控制所述磁悬浮
支撑模组将所述主轴调整至所述指定位置。
14.通过采用上述技术方案,本方案提供了两种获取主轴位置信息的监测方式,第一种为拍摄主轴图像,第二种为测距,上述两种监测方式被运用于不同偏移类型的情况,若偏移类型为径向偏移,此时只需通过拍摄主轴图像的方式即可确定位置信息,无需测量所有测距子单元的距离数据,减少系统运算量,减轻系统运行负担;而只有在偏移类型为非径向偏移时,此时由于拍摄主轴图像的方式将无法精准地获取到主轴的具体位置信息以及偏移情况,才会通过分设于主轴两端的测距子单元来获取距离数据,并基于所有距离数据来分析主轴的偏移情况。
15.作为优选,所述基准板靠近每一所述基准杆础的侧壁均设置有复位弹簧,所述复位弹簧其中一端连接于对应的基准杆侧壁,另一端连接于基准板侧壁。
16.通过采用上述技术方案,当主杆重新移动至指定位置时,此时主杆撤销对基准杆的抵推,此时可以通过复位弹簧实现对先前滑移的基准杆的自动复位。
17.作为优选,所述基准板靠近每一基准杆处的侧壁均开设有插孔,所述插孔内设置有磁铁片,所述基准杆插设于对应的插孔内,且所述基准杆周壁设置有与磁铁片磁性吸合的吸附铁片。
18.通过采用上述技术方案,当主轴出现非径向偏移时,主轴端部抵推部分基准杆,以使得部分基准杆滑移,而磁铁片和吸附铁片的设置可以实现基准杆的稳定滑移,减少出现基准杆因外部振动力而滑移的情况。
19.作为优选,所述主轴朝向基准板处的一端端壁设置有叶片。
20.通过采用上述技术方案,当主轴转动时,将随主轴一并转动,转动中的叶片将煽动壳体内的气流,一方面促进壳体内气流的流动,起到散热作用,另一方面也可以使得沉落于主轴偏移检测模块的监测端上的灰尘等杂物受气流作用而脱离监测端。
21.作为优选,每一所述基准杆朝向主轴处的一端均设置有冷却部,所述冷却部远离基准杆处的一端贴合于主轴端壁,所述冷却部内装盛有冷却液。
22.通过采用上述技术方案,由于主轴高速旋转时,主轴与基准杆相互接触的面壁上极易因摩擦而生热,此时冷却部的设置可以对基准杆与主轴接触面起到散热冷却的作用。
23.作为优选,所述基准杆端部开设有供对应的冷却部插设的插槽,所述基准杆靠近插槽槽口处的端壁设置有防止冷却部脱离插槽的限位片,所述冷却部转动连接于插槽内。
24.通过采用上述技术方案,当主轴转动时,主轴与冷却部接触,从而带动冷却部转动,一方面,转动的冷却部可以带动起内部的冷却液流动,确保冷却液的活性,减少冷却液沉降的情况,另一方面,冷却部在转动过程中不断调整其与主轴的接触点,可以优化冷却效果。
25.综上所述,本技术包括以下至少一种有益技术效果:1.与现有技术相比,磁悬浮轴承与主轴为无机械接触的连接方式,从而免除了与主轴接触产生的摩擦而产生的磨损、免润滑,相对接触类轴承降低了功耗,延长了压缩机系统的整体使用寿命;2.本方案提供了两种获取主轴位置信息的监测方式,第一种为拍摄主轴图像,第二种为测距,上述两种监测方式被运用于不同偏移类型的情况,若偏移类型为径向偏移,此时只需通过拍摄主轴图像的方式即可确定位置信息,无需测量所有测距子单元的距离数
据,减少系统运算量,减轻系统运行负担;而只有在偏移类型为非径向偏移时,此时由于拍摄主轴图像的方式将无法精准地获取到主轴的具体位置信息以及偏移情况,才会通过分设于主轴两端的测距子单元来获取距离数据,并基于所有距离数据来分析主轴的偏移情况。
附图说明
26.图1是本技术实施例中一种轴向磁悬浮压缩机系统的结构示意图。
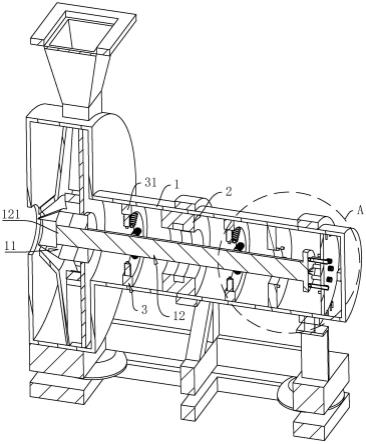
27.图2是本技术实施例中一种轴向磁悬浮压缩机系统内部结构的剖视图。
28.图3是本技术实施例中一种轴向磁悬浮压缩机系统的结构框图。
29.图4是图2中用于体现a部分结构的放大示意图。
30.图5是实施例中用于体现基准板、基准杆以及基准杆位置监测单元之间的位置关系的示意图。
31.附图标记说明:1、壳体;11、叶轮;12、主轴;121、第一转轴;122、第二转轴;1221、叶片;13、承接环板;2、驱动组件;3、磁悬浮支撑模组;31、磁悬浮轴承;4、位置监测模组;41、基准板;42、基准杆;421、插孔;422、复位弹簧;423、磁铁片;424、吸附铁片;425、插槽;426、冷却部;427、限位片;43、主轴偏移监测模块;44、偏移位置确定模块;441、基准杆位置监测单元;442、主轴位置监测单元;4421、摄像子单元;4422、测距子单元;5、控制器;51、偏移类型确定模块;52、位置信息获取模块;53、主轴位置修正模块。
具体实施方式
32.以下结合附图1-5对本技术作进一步详细说明。
33.本技术实施例公开一种轴向磁悬浮压缩机系统。参照图1、图2和图3,轴向磁悬浮压缩机系统包括壳体1、转动连接于壳体1内的主轴12、固定套接于主轴12端部的叶轮11、用于驱动主轴12转动的驱动组件2,用于支撑主轴12的磁悬浮支撑模组3、用于检测主轴12是否偏离指定位置的位置监测模组4,以及控制器5。磁悬浮支撑模组3与位置监测模组4均受控于控制器5,控制器5具体可以为plc控制器,以用于控制位置监测模组4实时监测主轴12在壳体1内的位置,并基于该监测结果,控制磁悬浮支撑模组3将主轴12保持在指定位置。
34.参照图2和图3,驱动组件2具体为电机定子、定子绕组以及与定子绕组相连通的电源,电机定子安装于壳体1内壁,主轴12具体可以为电机转子,主轴12贯穿电机定子中部,因此,驱动组件2带动主轴12转动的具体原理为电机驱动轴转动的原理一致,在此不再赘述;可以通过控制器5来控制驱动组件2来实现对主轴12的转动驱动。
35.参照图2和图3,磁悬浮支撑模组3包括至少两个磁悬浮轴承31,以及用于向磁悬浮轴承31供电的电源,磁悬浮轴承31固定安装于壳体1内,主轴12每一端至少对应一个磁悬浮轴承31,磁悬浮轴承31自带绕线铁芯和绕设于绕线铁芯上的绕组,绕组外通电源产生磁场,以通过该磁场控制主轴12悬浮,控制器5通过控制通入绕组内电流的大小来控制主轴12的悬浮位置,当主轴12处于指定位置时,主轴12轴线方向平行于磁悬浮轴承31的轴线方向,且主轴12位于磁悬浮轴承31中心。
36.参照图3和图4,位置监测模组4包括基准板41,基准板41固定安装于壳体1内壁,且当主轴12处于指定位置时,主轴12中心与基准板41中心所连直线平行于主轴12轴线方向。主轴12包括端部一体成型的第一转轴121和第二转轴122,第二转轴122位于第一转轴121靠
近基准板41处的一端,第二转轴122的外径大于第一转轴121的外径。
37.参照图4,基准板41靠近第二转轴122边沿处的侧壁开设有若干个插孔421,插孔421沿基准板41第二转轴122周向均匀排布,每一插孔421内均插设有基准杆42,每一插孔421内壁均焊接有磁铁片423,每一基准杆42周壁焊接有吸附铁片424,当基准杆42插设于插孔421内时,磁铁片423与吸附铁片424磁性吸合;每一基准杆42远离第二转轴122处的端部均套接有复位弹簧422,复位弹簧422位于基准板41背离第二转轴122处的一侧,复位弹簧422其中一端粘接于基准杆42侧壁,另一端粘接于基准板41侧壁。
38.参照图4,每一基准杆42朝向第二转轴122处的端壁均开设有插槽425,插槽425内插设有球状的冷却部426,冷却部426内部开设有冷却腔,冷却腔内装盛有冷却液,基准杆42靠近插槽425槽口处的端壁上一体成型有限位片427,限位片427用于防止冷却部426脱离插槽425;处于指定位置时的第二转轴122端壁贴合于所有基准杆42的冷却部426,当第二转轴122自转时,冷却部426可以对第二转轴122与基准杆42的接触面进行散热冷却。
39.参照图4,第二转轴122朝向基准板41的端壁还焊接有叶片1221,叶片1221可以为一个也可以为多个,本实施例中,叶片1221为多个,且沿第二转轴122周向均匀排布;当第二转轴122自转时,叶片1221随第二转轴122转动进而起到煽动壳体1内气流,实现壳体1内气流流通、散热的作用。
40.参照图3和图4,位置监测模组4还包括主轴偏移监测模块43,主轴偏移监测模块43用于检测主轴12边沿是否位于监测范围内,并在不处于监测范围内时,向控制器5发出偏移信号,具体的,本实施例中主轴偏移监测模块43为若干个沿第二转轴122周向均匀分布的对射式光电开关,对射式光电开关的发射器安装于基准板41上,接收器安装于壳体1内壁预设的承载环板13上,承载环板13与基准板41相向设置,当第二转轴122处于指定位置时,对射式光电开关的发射器所发出的光线位于第二转轴122的边沿,即,所有对射式光电开关发射器所围合形成的圆恰好为第二转轴122的同心圆,且外径相同;因此,当第二转轴122处于指定位置时,所有对射式光电开关的接收器均无法接收到对应的发射器所发出的光线,而一旦第二主轴12位置偏移,则势必存在部分对射式光电开关的接收器能够接收到对应的发射器所发出的光线,以此来判定主轴12是否偏移,若存在任意对射式光电开关的接收器能够接收到对应的发射器的光线,则向控制器5发出偏移信号。
41.参照图3和图4,位置监测模组4还包括偏移位置确定模块44,控制用于在接收到偏移信号时,向偏移位置确定模块44发出定位信号,偏移位置确定模块44用于在接收到定位信号时,确定主轴12当前的位置信息,并将位置信息反馈至控制器5。
42.参照图3、图4和图5,偏移位置确定模块44包括基准杆位置监测单元441和主轴位置监测单元442,基准杆位置监测单元441用于接收控制发出的定位信号,并基于定位信号,监测所有基准杆42的滑移情况,具体的,基准杆位置监测单元441可以为安装于壳体1内壁的对射式光电开关;由于基准杆42沿基准板41周向分布(如图5所示),处于同一处于同一水平线上的每一基准杆42均对应一个基准杆位置监测单元441,当第二转轴122处于指定状态时,此时复位弹簧422未形变,基准杆42处于初始位置,此时基准杆位置监测单元441所对应的接收器能够接收到对应发射器发出的光线,而当基准杆位置监测单元441接收器无法接收到对应发射器发出的光线时,则说明基准杆42滑移并挡住光线,而基准杆42滑移的原因为受到第二转轴122的抵推,而第二转轴122只有在偏移指定位置,且偏离类型为非径向偏
移时,才会抵推基准杆42;上述非径向偏移是指偏移后的第二转轴122的轴线方向不平行于处于指定位置时的第二转轴122的轴线方向;相反,若第二转轴122在偏移时,其轴线方向始终平行于其处于指定位置时的轴线方向,即第二转轴122沿其径向偏移,则认定第二转轴122的偏移类型为径向偏移。
43.参照图3和图4,控制器5包括偏移类型确定模块51,用于接收基准杆位置监测单元441所监测的有关第二转轴122的偏移情况,并确定偏移类型,具体的,若基准杆位置监测单元441所对应的任意接收器无法接收到对应发射器发出的光线,则确定偏移类型非径向偏移,若基准杆位置监测单元441所对应的所有接收器均能接收到对应发射器发出的光线,则为径向偏移。
44.参照图2、图3和图4,主轴位置监测单元442具体包括摄像子单元4421以及测距子单元4422,摄像子单元4421具体为与控制器5电连接的照相机,用于拍摄第二转轴122的图像,为了方便拍摄,本实施例中的基准板41可以为透明材质,第二转轴122中心可以用突出颜色进行标记,如用红色染料涂染第二转轴122的中心点;测距子单元4422具体为安装于每一磁悬浮轴承31的每一绕线铁芯端部的测距传感器,用于检测第一主轴12距离对应绕线铁芯的距离。
45.参照图3和图4,控制器5还包括位置信息获取模块52,用于在主轴12偏移类型为径向偏移时,向摄像子单元4421发送监测指令,用于在主轴12偏移类型为非径向偏移时,向测距子单元4422发送监测指令;控制器5用于接收上述摄像子单元4421所拍摄的图像,或测距子单元4422所检测的距离数据,并基于获取的图像,以指定位置时第二转轴122的中心位置作为坐标原点建立二维坐标系,并确定上述图像中的第二转轴122的中心位置距离坐标原点的距离,从而获取坐标信息;控制器5中可以预存储有横坐标值与纵坐标值与电流大小的对应关系,此时位置信息获取模块52根据上述对应关系确定向磁悬浮轴承31施加的电流值;并控制对应电源调整对磁悬浮轴承31所施加的电流。
46.参照图3和图4,控制器5中还预存储有第二转轴122处于指定位置时,磁悬浮轴承31中的每一绕线铁芯距离第一主轴12的距离值,相应的,当位置信息获取模块52获取到的是距离数据时,位置信息获取模块52即可将上述距离数据与预存储的距离值进行比对,确定不一致的绕线铁芯位置以及需要对应需要施加的电流值。
47.参照图3和图4,控制器5还包括主轴位置修正模块53,主轴位置修正模块53用于接收位置信息获取模块52所确定得出的需要调整电流值的磁悬浮轴承31的绕线铁芯,以及最终需要调整到的电流值,并控制对应电源对对应的绕线铁芯上的绕组上的电流进行调整,以使得主轴12调整至指定位置。
48.本技术实施例一种轴向磁悬浮压缩机系统的实施原理为:通过磁悬浮支撑模组3控制主轴12悬浮,通过驱动组件2带动主轴12转动,通过主轴偏移监测模块43检测主轴12是否偏移,并在偏移时,向控制器5发送偏移信号,当控制器5接收到偏移信号时,向偏移位置确定模块44发送定位信号,偏移位置确定模块44在接收到定位信号时通过基准杆位置监测单元441判定是否存在基准杆42滑移的情况,并将上述滑移情况发送至控制器5,控制器5中的偏移类型确定模块51用于根据滑移情况确定主轴12偏移类型;位置信息获取模块52用于获取主轴12偏移类型,并在主轴12偏移类型为径向偏移时,控制摄像子单元4421拍摄带有第二主轴12端部的图像,再确定偏移后的第二转轴122的
中心点在上述图像中的坐标,在基于上述坐标确定需要调整电流值的磁悬浮轴承31的绕线铁芯及其绕组的需要调整的具体电流值;位置信息获取模块52还用于在主轴12偏移类型为非径向偏移时,控制测距子单元4422检测其与第一转轴121的距离数据,再基于距离数据确定需要调整电流值的磁悬浮轴承31的绕线铁芯及其绕组的需要调整的具体电流值;最后通过主轴位置修正模块53基于位置信息获取模块52所确定的电流值控制磁悬浮支撑模组3将主轴12调整至指定位置。
49.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1