基于贝塞尔曲线设计型线的多齿罗茨转子及其设计方法
1.本发明属于罗茨机械领域,具体涉及一种基于贝塞尔曲线设计型线的多齿罗茨转子及其设计方法。
背景技术:
2.罗茨机械是一种具有强制吸排气功能的容积式回转机械,作为鼓风机或真空泵在现代工业中有着广泛的应用。相比于其他容积式机械,其具有运转可靠、成本低、无气阀等易损件,兼容液体以及运转效率高等特点。罗茨机械的核心零部件为一对相互啮合的转子,转子的关键设计要素为转子型线,型线的设计将直接决定着整机的热力性能。
3.为保证两转子之间符合啮合关系,现有转子型线多采用圆弧及圆弧包络线、渐开线、摆线等曲线形式,但以上曲线形式的设计空间较小,转子形状可调空间有限,进而使得基于现有型线结构的性能优化空间较小,无法获取满足不同需求时的最优几何形状调控。
技术实现要素:
4.本发明的目的在于针对上述现有技术中的问题,提供一种基于贝塞尔曲线设计型线的多齿罗茨转子及其设计方法,通过调节贝塞尔曲线的参数实现罗茨转子型线的高灵活度调节。
5.为了实现上述目的,本发明至少具有如下的有益效果:
6.一种基于贝塞尔曲线设计型线的多齿罗茨转子,包括具有相同罗茨型线的两个转子,两个转子旋向不同且相互啮合;所述罗茨型线的单齿齿形由对称的上半部分曲线段abcde与下半部分曲线段ab1c1d1e1拼接而成;所述上半部分曲线段abcde由齿顶曲线段与齿底曲线段组成,所述齿顶曲线段为齿顶圆弧段ab与贝塞尔曲线段bc的组合曲线段,所述齿底曲线段由曲线段cd与齿根圆弧段de共同组成,所述曲线段cd为贝塞尔曲线段bc的包络曲线段;将罗茨型线的单齿齿形进行旋转并拼接,组成完整罗茨型线。
7.作为一种优选方案,所述贝塞尔曲线段bc上点的位置向量按下式计算:
[0008][0009]
式中,r
bc
表示贝塞尔曲线段bc上点的位置向量,rb与rc分别表示点b与点c的位置向量,r
p1
与r
p2
分别表示点p1与点p2的位置向量;
[0010]
点p1与点p2分别取自线段bp0与线段cp0上的一点,方向向量表达式如下:
[0011][0012]
式中,i1与i2分别为点p1与点p2的位置参数,为设计参数;r
p0
为点p0的位置向量,点p0为直线bp0与直线cp0的交点,直线bp0经过点b,斜率由齿顶圆弧段ab在点b处的切向向量决定,直线cp0经过点c,斜率由点c处的方向向量决定,点c处的方向向量由可设计角度β决定,可设计角度β为点c处的切线与x轴所夹角度。
[0013]
作为一种优选方案,所述点c处的位置向量为:
[0014][0015]
式中,r
p
表示节圆半径,a表示中心距,为设计参数,α按下式求解:
[0016][0017]
式中,m表示齿数,为设计参数;
[0018]
点b处的位置向量为:
[0019]
rb=[r2cosγ r2sinγ]
[0020]
式中,r2表示齿顶圆弧段ab的圆弧半径,γ表示齿顶圆弧段ab所经历的中心转角,为设计参数。
[0021]
作为一种优选方案,两个转子的罗茨型线通过偏置角度ε后,实现不同旋向的旋转且相互啮合;
[0022]
偏置角度ε由以下表达式求出:
[0023][0024]
作为一种优选方案,所述曲线段cd在直角坐标系o
xy
中的计算表达式为:
[0025][0026]
式中,r
cd
表示曲线段cd上点的位置向量;φ为中间转角变量参数,由如下关系式求出:
[0027]
τ
bc
(θ,φ)
·
[x
s,bc
(θ,φ)-r
p y
s,bc
(θ,φ)]
t
=0
[0028]
式中,τ
bc
表示贝塞尔曲线段bc的切向向量在静止坐标系中的位置向量;r
p
表示节圆半径;(x
s,bc
,y
s,bc
)表示贝塞尔曲线段bc在旋转坐标系中的位置向量,由如下关系式求出:
[0029][0030][0031]
一种所述基于贝塞尔曲线设计型线的多齿罗茨转子的设计方法,包括以下步骤:
[0032]
根据排气量与密封性要求确定转子中心距a、齿顶圆弧段ab的圆弧半径r2与齿数m,以及确定节圆半径r
p
、点a的位置、点e的位置与点c的位置;
[0033]
根据强度与密封要求确定齿顶圆弧段ab所经历的中心转角γ,确定齿顶圆弧段ab,进而确定点b的位置与点d的位置;
[0034]
根据设计需求,以最大面积利用率以及最短接触线长度中的任一种或两种综合为优选目标,选取点c处的切线与x轴所夹角度β,点p1与点p2的位置参数i1与i2;
[0035]
依据以上参数确定贝塞尔曲线段bc,并通过啮合定理求出曲线段cd;
[0036]
通过组合齿顶圆弧段ab、贝塞尔曲线段bc、曲线段cd与齿根圆弧段de组成单齿齿形的上半部分曲线段abcde,再通过上下对称得到下半部分曲线段ab1c1d1e1,拼接形成完整的单齿齿形,再对完整的单齿齿形通过旋转拼接,组成完整罗茨型线;
[0037]
将具有相同罗茨型线的两个转子通过偏置角度ε后,使两个转子沿不同旋向旋转,且相互啮合。
[0038]
作为一种优选方案,通过调节点c处的切线与x轴所夹角度β、点p1与点p2的位置参数i1与i2,以及齿顶圆弧段ab所经历的中心转角γ中的任意一种或多种的组合以实现转子型线形状的调节。
[0039]
作为一种优选方案,通过调节点c处的切线与x轴所夹角度β实现转子型线面积利用率的调节。
[0040]
相较于现有技术,本发明至少具有如下的有益效果:
[0041]
采用贝塞尔曲线组成罗茨转子齿形的齿顶部分曲线,进而根据啮合关系求解齿根部分曲线,通过调节贝塞尔曲线的参数可以实现罗茨转子型线的高灵活度调节,包括通过调节点c处的切线与x轴所夹角度β、点p1与点p2的位置参数i1与i2,以及齿顶圆弧段ab所经历的中心转角γ中的任意一种或多种的组合可以实现转子型线形状的调节。通过调节齿数m可以实现转子型线齿数的灵活调节。通过调节点c处的切线与x轴所夹角度β可以实现转子型线面积利用率的调节。本发明多齿罗茨转子的可调空间较大,进而使得基于现有型线结构的性能优化空间较大,从而可以获取满足不同需求下的最优几何形状调控。
附图说明
[0042]
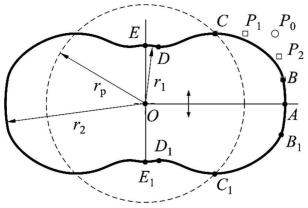
图1(a)本发明实施例基于贝塞尔曲线设计型线的多齿罗茨转子齿形示意图;
[0043]
图1(b)本发明实施例基于贝塞尔曲线设计型线的多齿罗茨转子型线求解示意图;
[0044]
图2本发明实施例基于贝塞尔曲线设计型线的多齿罗茨转子型线啮合过程示意图;
[0045]
图3(a)通过调节点c处的切线与x轴所夹角度β调节本发明转子型线形状示意图;
[0046]
图3(b)通过调节点p1与点p2位置参数i1与i2调节本发明转子型线形状示意图;
[0047]
图3(c)通过调节齿顶圆弧段ab所经历的中心转角γ调节本发明转子型线形状示意图;
[0048]
图4(a)本发明齿数为3的转子型线示意图;
[0049]
图4(b)本发明齿数为4的转子型线示意图;
[0050]
图5传统圆弧型线与本发明不同β角下的型线面积利用率对比图。
具体实施方式
[0051]
下面结合附图对本发明做进一步的详细说明。
[0052]
参见图1(a)和图1(b),本发明实施例提出一种基于贝塞尔曲线设计型线的多齿罗茨转子,通过调节贝塞尔曲线的参数可以实现罗茨转子型线的高灵活度调节,具体包括具有相同罗茨型线的两个转子,两个转子的旋向不同且相互啮合;罗茨型线的单齿齿形由对称的上半部分曲线段abcde与下半部分曲线段ab1c1d1e1拼接而成。其中,上半部分曲线段abcde由齿顶曲线段与齿底曲线段组成,齿顶曲线段为齿顶圆弧段ab与贝塞尔曲线段bc的
组合曲线段,齿底曲线段由曲线段cd与齿根圆弧段de共同组成,曲线段cd为贝塞尔曲线段bc的包络曲线段;将罗茨型线的单齿齿形进行旋转并拼接,进而组成完整且圆滑过渡的多齿罗茨转子型线结构,如图2所示,两个完全相同的罗茨转子型线可完成正确的啮合关系。
[0053]
在本实施例中,贝塞尔曲线段bc上点的位置向量按下式计算:
[0054][0055]
式中,r
bc
表示贝塞尔曲线段bc上点的位置向量,rb与rc分别表示点b与点c的位置向量,r
p1
与r
p2
分别表示点p1与点p2的位置向量;
[0056]
点p1与点p2分别取自线段bp0与线段cp0上的一点,方向向量表达式如下:
[0057][0058]
式中,i1与i2分别为点p1与点p2的位置参数,为设计参数;r
p0
为点p0的位置向量,点p0为直线bp0与直线cp0的交点,直线bp0经过点b,斜率由齿顶圆弧段ab在点b处的切向向量决定,直线cp0经过点c,斜率由点c处的方向向量决定,点c处的方向向量由可设计角度β决定,可设计角度β为点c处的切线与x轴所夹角度。
[0059]
点c处的位置向量为:
[0060][0061]
式中,r
p
表示节圆半径,a表示中心距,为设计参数,α按下式求解:
[0062][0063]
式中,m表示齿数,为设计参数;
[0064]
点b处的位置向量为:
[0065]
rb=[r2cosγ r2sinγ]
[0066]
式中,r2表示齿顶圆弧段ab的圆弧半径,γ表示齿顶圆弧段ab所经历的中心转角,为设计参数。
[0067]
将两个转子的罗茨型线通过偏置角度ε后,两个转子沿不同旋向旋转可完成正确的啮合关系,偏置角度ε由以下表达式求出:
[0068][0069]
曲线段cd贝塞尔曲线段bc通过啮合定理求出,曲线段cd在直角坐标系o
xy
中的计算表达式为:
[0070][0071]
式中,r
cd
表示曲线段cd上点的位置向量;φ为中间转角变量参数,由如下关系式求出:
[0072]
τ
bc
(θ,φ)[x
s,bc
(θ,φ)-r
p y
s,bc
(θ,φ)]
t
=0
[0073]
式中,τ
bc
表示贝塞尔曲线段bc的切向向量在静止坐标系中的位置向量;r
p
表示节
圆半径;(x
s,bc
,y
s,bc
)表示贝塞尔曲线段bc在旋转坐标系中的位置向量,由如下关系式求出:
[0074][0075][0076]
本发明能够实现罗茨转子型线的高灵活度设计,在本实施例中,通过调节点c处的切线与x轴所夹角度β可实现如图3(a)所示的转子型线形状的灵活调节,通过调节点p1与点p2的位置参数i1与i2可实现如图3(b)所示的转子型线形状的灵活调节,通过调节齿顶圆弧段ab所经历的中心转角γ可实现如图3(c)所示的转子型线形状的灵活调节。
[0077]
通过调节齿数m可实现转子型线齿数的灵活调节,如图4(a)与图4(b)所示。通过调节点c处的切线与x轴所夹角度β可实现如图5所示的转子型线面积利用率的灵活调节。
[0078]
本发明的另一实施例还提出一种所述基于贝塞尔曲线设计型线的多齿罗茨转子的设计方法,包括以下步骤:
[0079]
s1、根据排气量与密封性要求确定转子中心距a、齿顶圆弧段ab的圆弧半径r2与齿数m,以及确定节圆半径r
p
、点a的位置、点e的位置与点c的位置。
[0080]
s2、根据强度与密封要求确定齿顶圆弧段ab所经历的中心转角γ,确定齿顶圆弧段ab,进而确定点b的位置与点d的位置。
[0081]
s3、根据具体设计需求,以最大面积利用率以及最短接触线长度中的任一种或两种综合为优选目标,选取点c处的切线与x轴所夹角度β,点p1与点p2的位置参数i1与i2。
[0082]
s4、依据以上参数设计,贝塞尔曲线段bc为:
[0083][0084]
式中,r
bc
表示贝塞尔曲线段bc上点的位置向量,rb与rc分别表示点b与点c的位置向量,r
p1
与r
p2
分别表示点p1与点p2的位置向量。
[0085]
点p1与点p2分别选取为线段bp0与线段cp0上的一点,其方向向量表达为:
[0086][0087]
式中,i1与i2分别为点p1与点p2的位置参数,为设计参数;r
p0
为点p0的位置向量,点p0为直线bp0与直线cp0的交点,直线bp0经过点b,斜率由齿顶圆弧段ab在点b处的切向向量决定,直线cp0经过点c,斜率由点c处的方向向量决定,点c处的方向向量由可设计角度β决定,可设计角度β为点c处的切线与x轴所夹角度。
[0088]
点c的位置向量为:
[0089][0090]
式中,r
p
表示节圆半径,a表示中心距,为设计参数,α按下式求解:
[0091]
[0092]
式中,m表示齿数,为设计参数;
[0093]
点b的位置向量为:
[0094]
rb=[r2cosγ r2sinγ]
[0095]
罗茨型线整体结构由转子中心距a、齿顶圆弧段ab的圆弧半径r2,齿数m,齿顶圆弧段ab所经历的中心转角γ,点c处的切线与x轴所夹角度β,点p1与点p2的位置参数i1与i2决定。
[0096]
曲线段cd在直角坐标系o
xy
中的计算表达式为:
[0097][0098]
式中,r
cd
表示曲线段cd上点的位置向量;φ为中间转角变量参数,由如下关系式求出:
[0099]
τ
bc
(θ,φ)
·
[x
s,bc
(θ,φ)-r
p y
s,bc
(θ,φ)]
t
=0
[0100]
式中,τ
bc
表示贝塞尔曲线段bc的切向向量在静止坐标系中的位置向量;r
p
表示节圆半径;(x
s,bc
,y
s,bc
)表示贝塞尔曲线段bc在旋转坐标系中的位置向量,由如下关系式求出:
[0101][0102][0103]
s5、通过组合齿顶圆弧段ab、贝塞尔曲线段bc、曲线段cd与齿根圆弧段de组成单齿齿形的上半部分,再通过上下对称形成完整的单齿齿形,再通过旋转变换,组成完整且圆滑过渡的多齿罗茨转子型线结构。
[0104]
s6、将两转子完全相同的罗茨转子型线通过偏置角度ε后,两转子沿不同旋向旋转并可完成正确的啮合关系,偏置角度ε可由以下公式求出:
[0105][0106]
s7、利用上述方法还可获得不同齿数的罗茨转子型线,如图4(a)与图4(b)所示。
[0107]
与现有技术相比,本发明的罗茨转子形状可调空间较大,进而使得基于现有型线结构的性能优化空间较大,从而可以获取满足不同需求下的最优几何形状调控。
[0108]
以上所述实施例仅用以说明本技术的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1