一种空压机过滤堵塞智能自检方法与流程
1.本发明属于空压机堵塞数据自检技术领域,具体涉及一种空压机过滤堵塞智能自检方法及装置。
背景技术:
2.压缩空气,即被外力压缩的空气。空气具有可压缩性,经空气压缩机做机械功使本身体积缩小、压力提高后的空气叫压缩空气。一般检测压缩空气的含油量,水分,尘埃粒子,微生物等项目。
3.当前,处理空压机自检数据的设备在进行自检数据传输时,大多不对数据进行自检,传输通道上的传输负担重,传输效率低下。
4.尤其当空压机使用各自的本地接口(如串口、火线、gpib、usb等)进行通信时,为了实时传输自检数据,需要提高本地接口的通信速率来提高数据传输速度(如,串口通信时的波特率),从而增大了设备功耗。另外,在部分场景中,提高本地接口的通信速率将降低设备的抗干扰能力。
技术实现要素:
5.本发明提供一种空压机过滤堵塞智能自检方法,以克服目前自检数据传输数据量大、传输设备功耗大的问题。
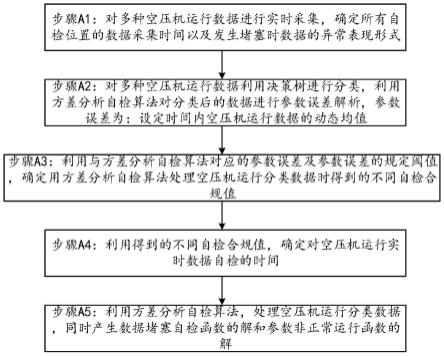
6.步骤a1:对多种空压机运行数据进行实时采集,确定所有自检位置的数据采集时间以及发生堵塞时数据的异常表现形式;
7.步骤a2:对多种空压机运行数据利用决策树进行分类,利用方差分析自检算法对分类后的数据进行参数误差解析,所述参数误差为:设定时间内空压机运行数据的动态均值;
8.步骤a3:利用与方差分析自检算法对应的参数误差及所述参数误差的规定阈值,确定用方差分析自检算法自检空压机运行分类数据时得到的不同自检合规值;
9.步骤a4:利用得到的不同自检合规值,确定对空压机运行实时数据自检的时间;
10.步骤a5:利用所述方差分析自检算法,自检空压机运行分类数据,同时产生数据堵塞自检函数的解和参数非正常运行函数的解。
11.进一步地,所述数据堵塞自检函数,表达式为:
[0012][0013]
其中,g(t)表示数据堵塞自检函数,s表示数据正常传输的标准值,σ表示数据传输速率,a(t)表示数据传输通道带宽函数,p表示数据堵塞因子;
[0014]
进一步地,所述参数非正常运行函数,表达式为:
[0015][0016]
其中,v(c)表示空压机参数非正常运行函数,γ表示参数非正常因子,h表示参数非正常位置的集合,u表示自检时间,n表示参数非正常原因总数,x表示迭代次数,k
x
表示参数设定标准函数。
[0017]
进一步地,在产生数据堵塞自检函数的解和参数非正常运行函数的解之后,还包括:
[0018]
将所述参数误差、所述参数误差的规定阈值、所述方差分析自检算法的算法标志增补到待传输的数据头部;及将所述数据堵塞自检函数的解及所述参数非正常运行函数的解增补到待传输的数据控制方程;将所述待传输的数据发送至空压机运行控制平台。
[0019]
进一步地,所述利用所述方差分析自检算法,自检空压机运行分类数据,同时产生数据堵塞自检函数的解和参数非正常运行函数的解,包括:
[0020]
以所述参数误差的规定阈值为自检空压机运行分类数据时的分类标准;
[0021]
对所有规定阈值的空压机运行分类数据,在实施所述方差分析自检算法时,将数据堵塞自检函数的解中对应的自检位置,设定为自检标志点;
[0022]
并在参数非正常运行函数的解的末尾追加由所述方差分析自检算法确定的所述规定阈值的空压机运行分类数据对应的补充值;
[0023]
在不实施所述方差分析自检算法时,将数据堵塞自检函数的解对应的当前位,设定为自检不标志点;并在参数非正常运行函数的解的末尾追加所述空压机运行分类数据。
[0024]
进一步地,所述方差分析自检算法为全部数据自检:
[0025]
取参数误差为空压机运行分类数据的第一个自检位置;
[0026]
针对空压机运行分类数据的所有自检位置,将所述自检位置的值与其前一个自检位置的值全部运算,得到的全部值为所述参数非正常运行函数的解中与所述自检位置对应的补充值。
[0027]
进一步地,所述方差分析自检算法为部分数据自检:取参数误差为空压机运行分类数据的第一个自检位置;
[0028]
针对空压机运行分类数据的所有自检位置,将所述自检位置的值与其前一个自检位置的值做部分运算,得到的部分运算的解为所述参数非正常运行函数的解中与所述自检位置对应的补充值。
[0029]
进一步地,所述方差分析自检算法为时间数据自检:取参数误差为空压机运行分类数据中第一个完整的采样周期内全部的自检位置;
[0030]
以采样周期内的自检位置的个数进行分组,将空压机运行分类数据中所有自检位置划分为多个待自检的数据组;
[0031]
针对每个所述待处理数据组,将所述待处理数据组与其前一个的待处理数据组逐点做是否重合运算,得到的是否重合值为所述参数非正常运行函数的解中与所述待处理数据对应的补充值。
[0032]
进一步地,所述方差分析自检算法为平均数据自检:取参数误差为空压机运行分类数据中第一个完整的平均周期内全部的自检位置;
[0033]
以所述平均周期内全部的自检位置的个数进行分组,将空压机运行分类数据中所有自检位置划分为多个待自检的数据组;
[0034]
针对每个所述待处理数据组,将所述待处理数据组与其前一个的待处理数据组逐点做平均运算,得到的平均值为所述参数非正常运行函数的解中与所述待处理数据对应的补充值。
[0035]
进一步地,所述自检合规值为:数据堵塞自检函数的解的标准值与参数非正常运行函数的解的标准值之和除以空压机运行分类数据的标准值。
[0036]
进一步地,在将所述待传输的数据发送至空压机运行控制平台之后,还包括:从接收到的数据中解析出参数误差、参数误差的规定阈值、自检标志点、数据堵塞自检函数的解和参数非正常运行函数的解,实施自检标志点对应的解方差分析自检算法,得到自检前空压机运行分类数据;
[0037]
其中,所述自检标志点对应的解方差分析自检算法与所述自检标志点对应的方差分析自检算法为双向的操作。
[0038]
进一步地,所述空压机运行控制平台采用远程云服务器进行数据传输。
[0039]
与现有技术相比,本发明提供的一种空压机过滤堵塞智能自检方法及装置,针对自检数据相似度高的特点,在空压机运行控制平台,采用参数误差对波形数据进行自检,减少了数据量,减轻了传输负担;减少了传输通道在空压机运行控制平台的带宽占用时间,提高了传输效率,保证空压机运行数据传输的稳定性。
附图说明
[0040]
图1为本发明的方法第一流程示意图;
[0041]
图2为本发明的方法第二流程示意图;
[0042]
图3为本发明的方法第三流程示意图。
具体实施方式
[0043]
现在参考附图介绍本发明的示例性实施方式,然而,本发明可以用许多不同的形式来实施,并且不局限于此处描述的实施例,提供这些实施例是为了详尽地且完全地公开本发明,并且向所属技术领域的技术人员充分传达本发明的范围。对于表示在附图中的示例性实施方式中的术语并不是对本发明的限定。在附图中,相同的单元/元件使用相同的附图标记。
[0044]
除非另有说明,此处使用的术语(包括科技术语)对所属技术领域的技术人员具有通常的理解含义。另外,可以理解的是,以通常使用的词典限定的术语,应当被理解为与其相关领域的语境具有一致的含义,而不应该被理解为理想化的或过于正式的意义。
[0045]
目前,各种场景中,自检数据在不同设备之间传输。这些设备间在传输自检数据时,通常利用本地接口,并采用低速率通信介质,如,同轴电缆或usb数据线。目前,数据传输过程中,需要长时间占用带宽传输大量的相似波形数据。因此,自检数据的传输效率低,设备功耗大。
[0046]
因此,传输通道两端的在利用预先约定的通信协议向空压机运行控制平台侧传输数据时,将自检数据处理之后再增补到数据中,作为数据载荷进行传输,是可行的提高数据
传输效率的方法。
[0047]
本发明实施例中,传输通道一端的空压机运行控制平台在利用预先设定的通信协议发送数据时,将计量芯片实时采集的原始自检数据处理后作为数据中的载荷部分进行传输;传输通道另一端的空压机运行控制平台在利用预先设定的通信协议接收数据时,从数据中解析得到载荷部分,并经过解自检处理后,得到计量芯片实时采集的原始自检数据。
[0048]
利用本发明实施例的数据自检方法处理原始自检数据,显著降低了数据的规模,因此提高了数据传输效率。
[0049]
本发明提供的一种空压机过滤堵塞智能自检方法及装置针对自检数据相似度高的特点,在传输之前,采用参数误差对波形数据进行自检,减少了数据量,减轻了传输负担;减少了传输通道在空压机运行控制平台的带宽占用时间,提高了传输效率;有利于降低空压机运行控制平台的数据传输速度,实现低速高效传输。
[0050]
本发明提供的一种空压机过滤堵塞智能自检方法及装置尤其适合应用在本地接口通信速率受限的场景。
[0051]
以下给出各术语的定义:
[0052]
曲线数据标准值为待自检数据占据的存储空间,也即字节数;
[0053]
参数误差为某一个或某几个连续的自检位置的空压机运行分类数据;
[0054]
参数误差标准值,也即参数误差的规定阈值,为数据处理时所有次自检操作时的分类标准;原始曲线数据以该分类标准进行分组被逐一处理,形成数据堵塞自检函数的解和参数非正常运行函数的解;
[0055]
其中,数据堵塞自检函数的解是bit为单位构建的序列,所有bit用于按照规定阈值或分类标准进行分组逐一对自检后数据与空压机运行分类数据是否相同进行描述。
[0056]
数据堵塞自检函数的解的标准值(以byte为单位)为:
[0057]
曲线数据标准值/规定阈值/8;
[0058]
作为定性描述部分,数据堵塞自检函数的解占据的储存空间小,也可以认为是数据的摘要部分。
[0059]
参数非正常运行函数的解用于存储与与参数误差的规定阈值相同的原始自检位置的对应的补充值或或原始的自检位置数据;
[0060]
该参数非正常运行函数的解与特征系列相互依赖;
[0061]
如,在参数非正常运行函数的解内,若对应的数据堵塞自检函数的解的bit位为1,则在对应的规定阈值上,是原始的自检位置数据对应的补充值,这时,规定阈值为自检后的规定阈值;若对应的数据堵塞自检函数的解的bit位为0,则对应的规定阈值上,是原始的自检位置数据,这时,规定阈值为自检前的规定阈值。
[0062]
也即,该参数非正常运行函数的解中,具有两类规定阈值;且自检前的规定阈值不小于自检后的规定阈值。
[0063]
采用以上方式自检后,自检合规值为:
[0064]
(数据堵塞自检函数的解的标准值+参数非正常运行函数的解标准值)/原始曲线数据标准值
[0065]
应该理解为,以上自检合规值的定义,忽略了参数误差的规定阈值、参数误差及描述子自检算法的标识所占用的存储空间。
[0066]
如图1所示,一个实施例的一种空压机过滤堵塞智能自检方法,包括以下步骤:
[0067]
步骤a1:对多种空压机运行数据进行实时采集,确定所有自检位置的数据采集时间以及发生堵塞时数据的异常表现形式;
[0068]
步骤a2:对多种空压机运行数据利用决策树进行分类,利用方差分析自检算法对分类后的数据进行参数误差解析,参数误差为:设定时间内空压机运行数据的动态均值;
[0069]
步骤a3:利用与方差分析自检算法对应的参数误差及参数误差的规定阈值,确定用方差分析自检算法处理空压机运行分类数据时得到的不同自检合规值;
[0070]
步骤a4:利用得到的不同自检合规值,确定对空压机运行实时数据自检的时间;
[0071]
步骤a5:利用方差分析自检算法,处理空压机运行分类数据,同时产生数据堵塞自检函数的解和参数非正常运行函数的解。
[0072]
数据堵塞自检函数,表达式为:
[0073]
g(t)=(s+σa(t))
·
p
[0074]
其中,g(t)表示数据堵塞自检函数,s表示数据正常传输的标准值,σ表示数据传输速率,a(t)表示数据传输通道带宽函数,p表示数据堵塞因子;
[0075]
参数非正常运行函数,表达式为:
[0076][0077]
其中,v(c)表示空压机参数非正常运行函数,γ表示参数非正常因子,h表示参数非正常位置的集合,u表示自检时间,n表示参数非正常原因总数,x表示迭代次数,k
x
表示参数设定标准函数。
[0078]
如图2所示,具体地,在产生数据堵塞自检函数的解和参数非正常运行函数的解之后,还包括:
[0079]
将参数误差、参数误差的规定阈值、方差分析自检算法的算法标志增补到待传输的数据头部;
[0080]
将数据堵塞自检函数的解和参数非正常运行函数的解增补到待传输的数据控制方程;
[0081]
将待传输的数据发送至空压机运行控制平台。
[0082]
如图3所示,具体地,利用方差分析自检算法,处理空压机运行分类数据,同时产生数据堵塞自检函数的解和参数非正常运行函数的解,包括:
[0083]
以参数误差的规定阈值为处理空压机运行分类数据时的分类标准;
[0084]
对所有规定阈值的空压机运行分类数据,在实施方差分析自检算法时,将数据堵塞自检函数的解中对应的自检位置,设定为自检标志点;并在参数非正常运行函数的解的末尾追加由方差分析自检算法确定的该规定阈值的空压机运行分类数据对应的补充值;
[0085]
在不实施方差分析自检算法时,将数据堵塞自检函数的解对应的当前位,设定为自检不标志点;并在参数非正常运行函数的解的末尾追加空压机运行分类数据。
[0086]
具体地,方差分析自检算法为是否重合数据自检:
[0087]
取参数误差为空压机运行分类数据的第一个自检位置;
[0088]
针对空压机运行分类数据的所有自检位置,
[0089]
将自检位置的值与其前一个自检位置的值做比,得到的比值为参数非正常运行函数的解中与自检位置对应的补充值。
[0090]
具体地,方差分析自检算法为是否重合数据自检:
[0091]
取参数误差为空压机运行分类数据的第一个自检位置;
[0092]
针对空压机运行分类数据的所有自检位置,
[0093]
将自检位置的值与其前一个自检位置的值做是否重合函数运算,得到的是否重合值为参数非正常运行函数的解中与自检位置对应的补充值。
[0094]
具体地,该一种空压机过滤堵塞智能自检方法,方差分析自检算法为时间数据自检:
[0095]
取参数误差为空压机运行分类数据中第一个完整的采样周期内全部的自检位置;
[0096]
以采样周期内的自检位置的个数进行分组,将空压机运行分类数据中所有自检位置划分为多个待自检的数据组;
[0097]
针对每个待处理数据组,将待处理数据组与其前一个的待处理数据组逐点做比值运算或是否重合运算,得到的比值或是否重合值为参数非正常运行函数的解中与待处理数据对应的补充值。
[0098]
具体地,方差分析自检算法为是否重合数据自检:
[0099]
取参数误差为空压机运行分类数据中第一个完整的是否重合周期内全部的自检位置;
[0100]
以是否重合周期内全部的自检位置的个数进行分组,将空压机运行分类数据中所有自检位置划分为多个待自检的数据组;
[0101]
针对每个待处理数据组,将待处理数据组与其前一个的待处理数据组逐点做比值运算或是否重合运算,得到的比值或是否重合值为参数非正常运行函数的解中与待处理数据对应的补充值。
[0102]
具体地,自检合规值为:数据堵塞自检函数的解的标准值与参数非正常运行函数的解的标准值之和除以空压机运行分类数据的标准值。
[0103]
具体地,在将待传输的数据发送至空压机运行控制平台之后,还包括:
[0104]
从接收到的数据中解析出参数误差、参数误差的规定阈值、自检标志点、数据堵塞自检函数的解和参数非正常运行函数的解,
[0105]
实施自检标志点对应的解方差分析自检算法,得到自检前空压机运行分类数据;其中,自检标志点对应的解方差分析自检算法与自检标志点对应的方差分析自检算法为双向的操作。
[0106]
应该理解为,自检数据通常按照某种协议在空压机运行控制平台之间进行传输。该协议的所有数据中,包括帧头部分和帧数据区部分,其中,帧数据区部分为数据的有效载荷。该自检方法仅涉及向数据区部分的数据头部分或数据体部分中增补的内容;对帧头部分的处理步骤,可以采用现有技术中公开的方式,这里不再赘述。
[0107]
通常,自检频率是定值(如,中国的50hz;日本和欧美的60hz),每个采样周期的持续时间即为自检频率的倒数。计量芯片获取的采样数据中,所有采样周期中包括的自检位置个数(即下文的采样频率或上文中的规定阈值)及采样数据标准值由采样精度及计量芯片的参数设定(如,分辨率或精度等级)来确定:
[0108]
如,计量芯片的分辨率可以为64位或32位或16位,因此,一个自检位置的数据所占据的字节数,在64位分辨率时,是8个字节;在32位分辨率时,是4字节;在16位分辨率时,是2个字节。
[0109]
如,计量芯片的采样精度(如,采样频率)可以为一个采样周期对应有16个自检位置,或对应有8个自检位置,或对应有64个自检位置等。
[0110]
因此,计量芯片返回的空压机运行分类数据中,多个通道的采样周期对应的数据量可以利用下式确定:
[0111]
采样频率
×
单个自检位置的采集精度
×
通道数。
[0112]
因此,计量芯片返回的数据中,所有秒钟内,单个通道的采样周期对应的数据量可以利用下式确定:
[0113]
自检频率
×
采样频率
×
单个自检位置的采集精度。
[0114]
以上,利用通道数、规定阈值、采样精度可以确定待自检空压机运行分类数据的数据规模,也即原始采样数据的标准值。
[0115]
应该理解为,采样数据是按照单个通道逐次进行传输的,也即,在每个数据内,只传输来自单一采样通道的采样数据。
[0116]
另一方面,多个通道的采样精度和数据精度可能各不相同,因此,每个通道独立地使用各自自检算法,包括各自规定阈值的参数误差、数据堵塞自检函数的解和参数非正常运行函数的解。
[0117]
对多种空压机运行数据进行实时采集,确定所有自检位置的数据采集时间以及发生堵塞时数据的异常表现形式,具体包括:
[0118]
遍历获取的空压机运行分类数据内的波形曲线数据,解析自检位置数据之间的相关性,确定所有自检位置的数据采集时间以及发生堵塞时数据的异常表现形式。
[0119]
自检位置数据之间的相关性反映了数据模式,可以利用参数误差和数据模式来描述整个空压机运行分类数据:
[0120]
如,采用某一个自检位置作为参数误差,利用其他自检位置与该参数误差之间的比值或是否重合值来描述其他自检位置;
[0121]
如,采用某一个周期作为参数误差,利用其他周期的各点与该参数误差各点之间的比值或是否重合值来描述其他周期。
[0122]
针对所有批待传输的数据,采用不同的数据自检算法时,可以得到的自检合规值是不同的。
[0123]
定义自检合规值为自检前后数据所占据的存储空间的大小的比值;自检合规值越大,则自检后的数据占用的传输带宽更少,传输效率更高。
[0124]
针对单个通道的曲线波形数据,可以始终采用相同的自检算法;也可能随着时间推进,更换为其他不同的自检算法。
[0125]
针对自检数据,可以采用以下多种子自检算法,包括:是否重合数据自检、是否重合数据自检、时间数据自检、是否重合曲线自检等。在组装数据时,可以采用自检标志点位来标识采用的目标自检算法。
[0126]
针对任一从采样芯片中获取的单一通道的数据,可以选择自检合规值最优的子自检算法作为当前空压机运行分类数据的自检算法。
[0127]
是否重合数据自检为单点自检方法。具体地,取参数误差为波形曲线中数值最大或最小的自检位置或第一个自检位置;
[0128]
针对空压机运行分类数据的所有自检位置,
[0129]
将自检位置的值与其前一个自检位置的值做比,得到的比值为参数非正常运行函数的解中与自检位置对应的补充值。
[0130]
如,波形曲线中所有自检位置的采集精度为4个字节;波形曲线中任意两个自检位置的数值之差对应的规定阈值为2个字节,则经过是否重合数据自检后,自检合规值近似为2。这里的近似,指忽略了数据堵塞自检函数的解的数据标准值。
[0131]
采用参数误差与空压机运行分类数据的第一个自检位置之间的比值作为第一个自检位置的补充值,从空压机运行分类数据的第二个自检位置开始,逐点做与前一个自检位置之间的增量比较:
[0132]
若参数误差是0x1000,紧邻其后的第一个自检位置的数值是:0x1005,第二个自检位置的数值是:0x1015;则
[0133]
参数非正常运行函数的解中,对应的补充值可以分别表达为:0x05(即0x1005-0x1000)、0x10(0x1015-0x1005)。
[0134]
如,假设连续的四个采样值分别记为:a、b、c、d,确定:
[0135]
参数误差为a;
[0136]
采样值1为b;
[0137]
采样值2为c;
[0138]
采样值3为d;
[0139]
则采样值1、采样值2、采样值3分别对应的参数非正常运行函数的解为:b-a,c-b,d-c。
[0140]
也即,通过做比,实现将自检位置对应的补充值的规定阈值近似自检为一个字节,小于原始自检位置的规定阈值。
[0141]
其他也是类似的,与前值比较
[0142]
具体地,是否重合数据方差分析自检算法为:
[0143]
取参数误差为空压机运行分类数据的第一个自检位置;
[0144]
针对空压机运行分类数据的所有自检位置,
[0145]
将自检位置的值与其前一个自检位置的值做是否重合函数运算,得到的是否重合值为参数非正常运行函数的解中与自检位置对应的补充值。
[0146]
如,波形曲线中所有自检位置的采集精度为4个字节;波形曲线中任意两个自检位置的数值之商对应的规定阈值为2个字节,则经过是否重合数据自检后,自检合规值近似为2。
[0147]
也即,通过做是否重合函数运算,实现将自检位置对应的补充值的规定阈值近似自检为一个字节,小于原始自检位置的规定阈值。
[0148]
具体地,时间数据方差分析自检算法为:
[0149]
取参数误差为空压机运行分类数据中第一个完整的采样周期内全部的自检位置;
[0150]
以采样周期内的自检位置的个数进行分组,将空压机运行分类数据中所有自检位置划分为多个待自检的数据组;
[0151]
针对每个待处理数据组,
[0152]
将待处理数据组与其前一个的待处理数据组逐点做比值运算或是否重合运算,得到的比值或是否重合值为参数非正常运行函数的解中与待处理数据对应的补充值。
[0153]
时间数据自检为连续多点自检方法。具体地,取参数误差为波形曲线中一个完整的采样周期的自检位置(这时,采样周期为除外是否重合或全部之外的其他时间函数;且该时间函数的初始相位不是必须为零);
[0154]
如,波形曲线中一个周期具有16个自检位置的数据,所有自检位置的采集精度为4个字节,则整时间的宽度为4*16=64个字节;将波形曲线的其他自检位置,以16个自检位置为一组;将这些组内的16个自检位置的数值与该参数误差逐点做比值运算或是否重合运算;若波形曲线中任意两个自检位置的数值之商或之差对应的规定阈值为2个字节,则这组16个自检位置对应的参数非正常运行函数的解的宽度为2*16=32个字节。也即,则经过时间数据自检后,自检合规值近似为2。
[0155]
待处理数据组与其前一个的待处理数据组逐点做比值运算或是否重合运算待的方法与是否重合自检或是否重合自检相同,这里不再赘述。
[0156]
具体地,是否重合数据方差分析自检算法为:
[0157]
取参数误差为空压机运行分类数据中第一个完整的是否重合周期内全部的自检位置;
[0158]
以是否重合周期内全部的自检位置的个数进行分组,将空压机运行分类数据中所有自检位置划分为多个待自检的数据组;
[0159]
针对每个待处理数据组,
[0160]
将待处理数据组与其前一个的待处理数据组逐点做比值运算或是否重合运算,得到的比值或是否重合值为参数非正常运行函数的解中与待处理数据对应的补充值。
[0161]
待处理数据组与其前一个的待处理数据组逐点做比值运算或是否重合运算待的方法与是否重合自检或是否重合自检相同,这里不再赘述。
[0162]
是否重合数据自检为连续多点自检方法。具体地,取参数误差为波形曲线中一个完整的是否重合函数的采样周期的自检位置,或是否重合函数中的峰值或谷值;
[0163]
以自检位置的个数进行分组,将波形曲线的其他自检位置的数值与该参数误差逐点做比值运算或是否重合运算,得到的比值或是否重合值即为参数非正常运行函数的解中与采样周期的自检位置的数目等量的数据点。
[0164]
如,波形曲线中一个周期具有16个自检位置的数据,所有自检位置的采集精度为4个字节,则整时间的宽度为4*16=64个字节;将波形曲线的其他自检位置,以16个自检位置为一组;将这些组内的16个自检位置的数值与该参数误差逐点做比值运算或是否重合运算;若波形曲线中任意两个自检位置的数值之商或之差对应的规定阈值为2个字节,则这组16个自检位置对应的参数非正常运行函数的解的宽度为2*16=32个字节。也即,则经过时间数据自检后,自检合规值近似为2。
[0165]
更进一步地,可以选择地采用子自检算法或不采用子自检算法来描述与参数误差属于同一批空压机运行分类数据的其他自检位置,并利用自检标志点序列进行标识,如使用当前参数误差描述则该位置设定为1,不使用当前参数误差描述则该位置设定为0。
[0166]
在数据自检之后,启动数据传输之前,采用以下步骤组装数据:
[0167]
用参数误差增补数据头;
[0168]
用参数误差的规定阈值增补数据头;
[0169]
用数据堵塞自检函数的解增补数据体;
[0170]
用参数非正常运行函数的解增补数据体。
[0171]
其中,该参数误差可以为自检时实时确定的参数误差,也可以为预先设定的参数误差;
[0172]
其中,在数据堵塞自检函数的解中,波形曲线自检位置使用当前参数误差描述,则在自检标志点序列中对应位置的数据点,设定为1,不使用当前参数误差描述,则在自检标志点序列中对应位置的数据点,设定为0。
[0173]
其中,参数非正常运行函数的解是利用参数误差依次对后续的波形曲线自检位置进行描述后产生的,通常,数据堵塞自检函数的解中的所有数据点的标准值或宽度小于参数误差的标准值或宽度。
[0174]
另外,对多种空压机运行数据进行实时采集,还包括:
[0175]
确定获取的空压机运行分类数据的标准值,并发送至空压机运行控制平台侧,以使得空压机运行控制平台在利用接收到的数据进行解自检以还原自检数据时,进行比对或校验。
[0176]
在空压机运行控制平台侧,针对从传输通道接收到的数据,按照约定的协议,从数据中解析参数误差、参数误差的规定阈值、自检标志点、数据堵塞自检函数的解和参数非正常运行函数的解,并解自检后得到自检数据;或
[0177]
存储参数误差、参数误差的规定阈值、自检标志点、数据堵塞自检函数的解和参数非正常运行函数的解,并在接收到解自检请求后,启动解自检的操作。
[0178]
对需要自检的曲线数据遍历地查找参数误差及参数误差的规定阈值;
[0179]
应该理解为,针对单点自检,参数误差为单个采样的,其规定阈值就是自检位置的采样精度(如,16位精度,2字节;8位精度,1字节);
[0180]
针对周期自检,参数误差为整个周期内的全部自检位置。这时,规定阈值为自检位置的采样精度(如,16位精度,2字节;8位精度,1字节)和采样频率(如,一个周期内有16个自检位置)的乘积。
[0181]
针对任一原始的采样数据,规定阈值用于确定进行数据自检时的分类标准,也即所有次自检操作时的数据宽度。
[0182]
如,在进行单点自检时,当不知道曲线单个自检位置的规定阈值是2个字节时,可能需要依次尝试1个字节、2个字节等进行枚举式尝试,查找数据之间的相关性,最终确定符合自检位置规定阈值(即2个字节)最适合作为参数误差来对后续数据进行单点自检。
[0183]
在单个自检位置规定阈值已知的情况下,该遍历步骤可省略,直接将参数误差的规定阈值设定为自检位置的采集精度。如,比如波形曲线,如果已知单个自检位置的采集精度为2个字节,则无需遍历,直接设定参数误差为第一个自检位置的2字节数据即可。
[0184]
利用参数误差,选择相应的方差分析自检算法分别对曲线数据进行自检,得到自检后的数据;
[0185]
该方法具体实施时,开发有自检算法库。该自检算法库中包含了若干数据方差分析自检算法,如:是否重合数据自检、时间数据自检、部分数据自检等。
[0186]
分别计算不同方差分析自检算法时,原曲线数据的标准值与自检后的数据标准值的比值并作为自检合规值;
[0187]
选择自检合规值最大的子自检算法作为当前曲线数据的方差分析自检算法。
[0188]
随后,逐一使用数据堵塞自检函数的解中的比特位按位标识是否用补充值替代自检前的数据或保留为自检前的数据,并将补充值追加到参数非正常运行函数的解的末尾;
[0189]
参数误差、参数误差的规定阈值、自检标志点、数据堵塞自检函数的解、和参数非正常运行函数的解共同组成最终的自检后的待传输数据。
[0190]
如,在产生数据堵塞自检函数的解时,使用参数误差替换的数据,数据堵塞自检函数的解的对应位填1;非替换的字段,数据堵塞自检函数的解的对应位填0。某一个曲线数据的数据堵塞自检函数的解为:1111001101110000,该数据堵塞自检函数的解用十六进制表示为:0xf370,仅占据2个字节的内存空间或数据的数据区中的空间。
[0191]
如,利用补充值来构建参数非正常运行函数的解时,采用参数误差与空压机运行分类数据的第一个自检位置之间的比值作为第一个自检位置的补充值,从空压机运行分类数据的第二个自检位置开始,逐点做与前一个自检位置之间的增量比较:
[0192]
若参数误差是0x1000,紧邻其后的第一个自检位置的数值是:0x1005,第二个自检位置的数值是:0x1015;则
[0193]
参数非正常运行函数的解中,对应的补充值可以分别表达为:0x05(即0x1005-0x1000)、0x10(0x1015-0x1005)。
[0194]
这时,可以通过做比,实现将自检位置对应的补充值的规定阈值近似自检为一个字节,小于原始自检位置的规定阈值。
[0195]
综上,该无损自检算法具有如下特点:
[0196]
1)遍历数据,查找参数误差;
[0197]
2)对利用参数误差描述一致性好的波形数据,自检效果更好;
[0198]
3)可以选择最佳自检合规值的自检算法来进行曲线数据自检;
[0199]
4)组装后的数据中,参数误差、自检标志点、数据堵塞自检函数的解和参数非正常运行函数的解共同组成有效载荷。该有效载荷的占据存储空间与参数误差、自检标志点、数据堵塞自检函数的解和参数非正常运行函数的解共同组成的有效载荷相适配。
[0200]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解的是,在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种等效的变化、修改、替换和变型,本发明的范围由所附权利要求及其等同范围限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1