一种正弧型仿生摆动水翼泵水装置及方法
本发明属于泵水设备,尤其涉及一种正弧型仿生摆动水翼泵水装置及方法。
背景技术:
1、我国南方地区由于人类日常的频繁活动以及平原河网地区水动力不足、自净能力差等自身特点,导致河网的水环境和水生态问题日益凸显。基于泵闸联合调度技术的调水引流工程,在增加水动力改善水质方面获得了一定成就,但在扬程几乎为零的小河道场景下,普遍存在气蚀严重、振动超标、效率低下等问题。研究发现,摆动水翼在合适的参数下有着较优的水动力性能,并在能量收集装置、水下推进器、滑翔机上都得以广泛应用。但是,将摆动水翼应用到泵水技术上报道较少。
2、目前水翼叶片的摆动方式都是升沉运动和俯仰运动耦合的二个自由度运动,且升沉方向的运动为直线运动。这种传统的直线型摆动方式并没有达到很好的仿生效果,此外,通过数值模拟发现水翼在传统直线型摆动方式下运动时,能量损耗比较严重。
3、通过查阅文献发现,鱼类以身体/尾鳍(body and/or caudal fin,bcf)推进运动时,尾柄为弧线运动,水翼运动为弧线型可以更好地达到仿生效果。模仿鱼尾摆动的扑翼式仿生泵水装置具有阻力小、噪声低、工作扬程低以及环境友好等多方面优点,能够较好的满足小河道超低扬程流域改善水动力使用需求。
4、因此,本发明提出一种正弧型仿生摆动水翼泵水装置及方法。
技术实现思路
1、为了解决现有技术存在的上述技术问题,本发明提供一种正弧型仿生摆动水翼泵水装置及方法,本发明借助摆动水翼的优秀水力性能,通过两个电机协同作业,实现水翼的主动俯仰运动来模仿鱼尾尾鳍摆动,水翼俯仰轴的主动运动来模仿鱼尾尾柄的运动,利用水翼在运动过程中对水体的推进,来达到泵水的目的。
2、本发明采用的技术方案是:
3、一种正弧型仿生摆动水翼泵水装置,其特征在于,包括驱动组件、支撑板和固定架,所述支撑板安装在固定架上方,所述驱动组件安装在所述支撑板上;
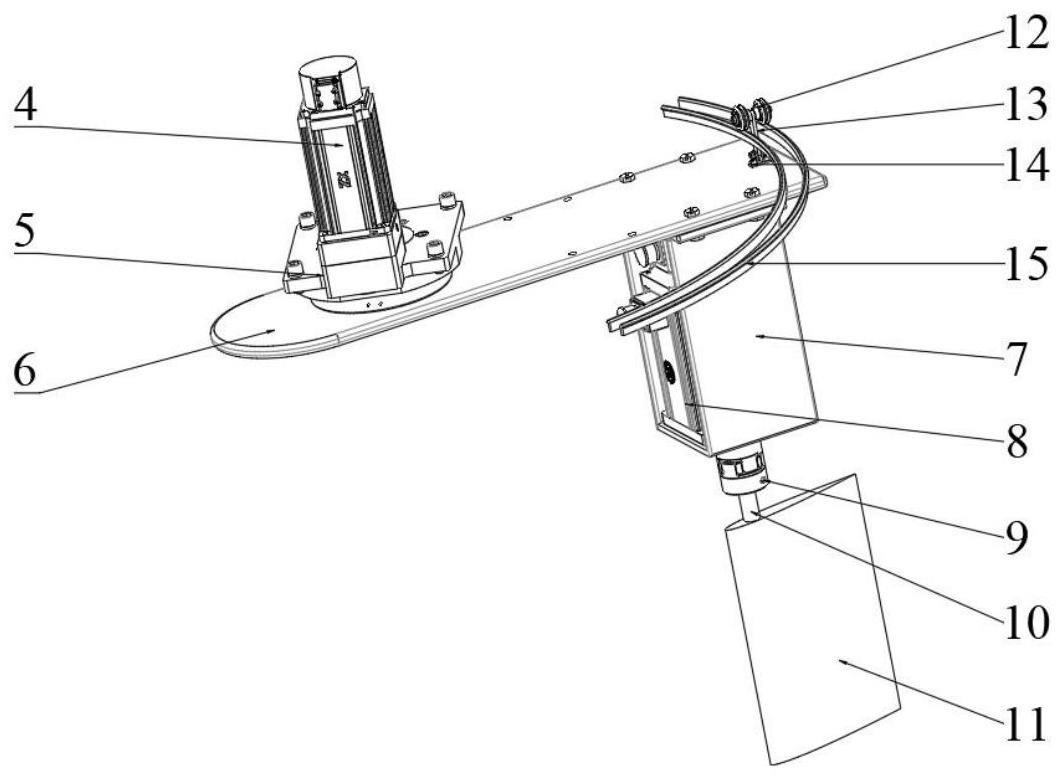
4、所述驱动组件包括圆弧电机、旋转平台、旋转板、俯仰电机、俯仰轴、水翼、支撑滚轮以及弧型导轨,所述旋转平台吊装于所述支撑板上,所述旋转板的左端固设在所述旋转平台上,所述圆弧电机的输出端与所述旋转平台连接,所述旋转平台的转动带动旋转板作圆弧运动,用于模仿鱼尾尾柄的圆弧运动;所述俯仰电机垂直安装在所述旋转板的右端下方,且所述俯仰电机的输出轴通过联轴器与所述俯仰轴的一端同轴连接,所述俯仰轴的另一端与水翼连接,所述俯仰电机控制水翼的俯仰运动,用于模仿鱼尾尾鳍的摆动;所述水翼的俯仰运动和圆弧运动的方向相同;所述支撑板上开设有用于安装所述弧型导轨的弧形凹槽,所述支撑滚轮置于所述弧型导轨上,当所述旋转板运动时带动所述支撑滚轮沿着弧型导轨运动,用于改善旋转板右端的受力。
5、进一步的,所述支撑滚轮设置有两个,分别安装在弧形导轨的两侧,并且通过连接件同轴连接;所述旋转板右端的上方垂直安装有一固定脚座,所述连接件通过连杆与所述固定脚座连接。
6、进一步的,所述连接件包括第一连接螺栓和第一连接螺母,所述第一连接螺栓依次穿过一侧的支撑滚轮、第一同心衬套、连杆一端的通孔、第二同心衬套、另一侧的支撑滚轮与第一连接螺母同轴连接;所述固定脚座通过第二连接螺栓以及第二连接螺母与连杆另一端的通孔铰接;所述的第一、第二同心衬套用以调节支撑滚轮和弧型导轨之间的松紧程度。
7、进一步的,所述旋转板上开设有多个用于安装俯仰电机支架的定位孔,将俯仰电机安装在不同位置的定位孔上,用于改变俯仰电机圆弧运动的曲率半径,以调节水翼在不同工况下的最优泵水性能。
8、进一步的,所述圆弧电机和俯仰电机均和plc控制器连接,实现电机的输出为正弦运动规律并且控制俯仰运动和圆弧运动的相位差为90°,保证水翼俯仰运动和圆弧运动方向相同。
9、进一步的,所述俯仰电机固定安装在一俯仰电机支架上,所述俯仰电机通过所述俯仰电机支架垂直安装于所述旋转板的右端下方。
10、一种正弧型仿生摆动水翼泵水方法,其特征在于,所述方法包括:
11、s1、将上述正弧型仿生摆动水翼泵水装置安放在平原小河道流域中;
12、s2、定义水翼沿着y轴做上下的往复运动为升沉运动,水翼沿着x轴做左右的往复运动为侧移运动,侧移运动方向为x轴正方向,水翼绕着枢轴位置自转的往复运动为俯仰运动,三者运动频率相同;其中,升沉运动和侧移运动的复合运动为绕固定圆心的圆弧运动;俯仰运动和升沉、侧移运动之间有一个相位差取为π/2rad;
13、s3、通过plc控制器对圆弧电机以及俯仰电机进行控制运动,俯仰电机通过俯仰轴控制水翼的俯仰运动,圆弧电机通过旋转板的圆弧运动控制水翼的圆弧运动,得到正弧型摆动水翼的运动模型为:
14、r=hmax/sin(h0)
15、
16、其中,r为俯仰轴圆弧运动的曲率半径,hmax为升沉幅值,h0为升沉摆角,θmax为水翼的俯仰幅值,t为运动到某个时刻的时间,f为摆动频率,为俯仰与侧移、升沉运动的相位差,x(t)和y(t)分别为水翼在侧移方向和升沉方向的位移,θ(t)为水翼的俯仰位移;
17、通过固定升沉幅值以及升沉摆角,进而固定圆弧轨迹的曲率半径以及圆心,确定俯仰轴的运动轨迹,通过改变参数可以得到不同的曲率半径的运动轨迹;升沉摆角的变化为正弦函数变化,俯仰角的变化也为正弦函数变化。
18、与现有技术相比,本发明的有益效果体现在:
19、1、本发明借助摆动水翼的优秀水力性能,通过驱动组件实现摆动水翼的主动摆动,利用摆动水翼在摆动过程中对水体的推进,来达到泵水的效果。
20、2、本发明摆动水翼的摆动方式为一种正弧型运动,是由升沉、俯仰、侧移三自由度耦合的复合运动,通过两个电机驱动实现,分别实现水翼俯仰轴的圆弧运动用以模仿鱼尾尾柄的运动,和水翼的俯仰运动用以模仿鱼尾尾鳍的摆动,而且两个电机按一定规律进行协同作业,这种正弧型摆动方式可以更加真实的模仿鱼尾的摆动,进而改善水翼的受力稳定性,提高泵水效率。
21、3、本发明提出的三自由度复合运动,引入了侧移运动,增加了侧移方向的输入功率,进而增加了输出功率的大小,即河道中流量得以提升,通过数值模拟发现,相比于传统直线型摆动,正弧型摆动的水翼有着更优的泵水性能。
22、4、本发明选取侧移运动为x轴正方向,水翼在初始位置时有最大俯仰角,且升沉运动和俯仰运动的方向相同,则水翼在运动时,当俯仰角变小时,侧移运动方向与水流的方向相反,当俯仰角变大时,侧移运动方向与水流的方向相同,改善了水翼在运动过程中的受力,使得水翼的推力系数峰值大小降低,稳定性提高;此外,x轴正方向的侧移运动使得水翼俯仰扭矩对水做的功减小,则水翼的泵水效率相对提高。
23、5、本发明方便安装于平原小河道流域中,相比于传统泵站,本发明结构简单,结构紧凑,能耗较低,而且对过流生物伤害较少,在超低扬程的平原河网地区有着独特的优势。
技术特征:
1.一种正弧型仿生摆动水翼泵水装置,其特征在于,包括驱动组件、支撑板和固定架,所述支撑板安装在固定架上方,所述驱动组件安装在所述支撑板上;
2.如权利要求1所述的一种正弧型仿生摆动水翼泵水装置,其特征在于,所述支撑滚轮设置有两个,分别安装在弧形导轨的两侧,并且通过连接件同轴连接;所述旋转板右端的上方垂直安装有一固定脚座,所述连接件通过连杆与所述固定脚座连接。
3.如权利要求2所述的一种正弧型仿生摆动水翼泵水装置,其特征在于,所述连接件包括第一连接螺栓和第一连接螺母,所述第一连接螺栓依次穿过一侧的支撑滚轮、第一同心衬套、连杆一端的通孔、第二同心衬套、另一侧的支撑滚轮与第一连接螺母同轴连接;所述固定脚座通过第二连接螺栓以及第二连接螺母与连杆另一端的通孔铰接;所述的第一、第二同心衬套用以调节支撑滚轮和弧型导轨之间的松紧程度。
4.如权利要求1所述的一种正弧型仿生摆动水翼泵水装置,其特征在于,所述旋转板上开设有多个用于安装俯仰电机支架的定位孔,将俯仰电机安装在不同位置的定位孔上,用于改变俯仰电机圆弧运动的曲率半径,以调节水翼在不同工况下的最优泵水性能。
5.如权利要求1所述的一种正弧型仿生摆动水翼泵水装置,其特征在于,所述圆弧电机和俯仰电机均和plc控制器连接,实现电机的输出为正弦运动规律并且控制俯仰运动和圆弧运动的相位差为90°,保证水翼俯仰运动和圆弧运动方向相同。
6.如权利要求1~5任意一项所述的一种正弧型仿生摆动水翼泵水装置,其特征在于,所述俯仰电机固定安装在一俯仰电机支架上,所述俯仰电机通过所述俯仰电机支架垂直安装于所述旋转板的右端下方。
7.一种正弧型仿生摆动水翼泵水方法,其特征在于,所述方法包括:
技术总结
本发明公开了一种正弧型仿生摆动水翼泵水装置及方法,装置包括驱动组件、支撑板和固定架,驱动组件包括圆弧电机、旋转平台、旋转板、俯仰电机、俯仰轴、水翼、支撑滚轮以及弧型导轨,旋转平台吊装于支撑板上,旋转板的左端固设在旋转平台上,圆弧电机的输出端与旋转平台连接,旋转平台的转动带动旋转板作圆弧运动,用于模仿鱼尾尾柄的圆弧运动;俯仰电机垂直安装在旋转板的右端下方,且俯仰电机的输出轴通过联轴器与俯仰轴的一端同轴连接,俯仰轴的另一端与水翼连接,俯仰电机控制水翼的俯仰运动,用于模仿鱼尾尾鳍的摆动;水翼的俯仰运动和圆弧运动的方向相同。本发明相比传统泵站,结构紧凑,能耗较低,在超低扬程的平原河网地区有着独特优势。
技术研发人员:朱文超,华尔天,谢荣盛,苏忠鑫,罗海涛,求林锋,金冬阳
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!