一种先导式比例伺服阀鲁棒输出反馈复合控制方法
本发明涉及电液伺服控制技术,具体涉及一种先导式比例伺服阀鲁棒输出反馈复合控制方法。
背景技术:
1、液压传动技术以功率密度大、极限工作参数高、传动形式灵活等优势,广泛应用于工程机械、制造等行业中。工业智能化水平的不断提升使得液压传动技术与电子控制技术的联系越来越密切,电液控制技术由此得到发展。电液伺服技术、电液比例技术因此应运而生。近年来,一般工程对于控制算法的要求愈来愈严格,单一闭环控制算法已经无法满足工程需求。由于比例阀已经不能较好地被运用于零位附近的位置、力控制闭环等场合而伺服阀存在结构复杂、生产成本高、抗污染性不好等问题,出现了兼备两者优势的比例伺服阀。比例伺服阀的电—机械转换装置为比例电磁铁,阀芯采用伺服阀的工艺和结构,使它既有一定的抗污能力、合理的成本以及阀口零遮盖的性能。但是传统的直驱式电液伺服阀很难满足在大流量的条件下同时具备良好的动态响应能力,因此一般通过改进电-机械转换器性能或者采用多级串联的先导式比例伺服阀进行控制的方式来达到上述目的。
2、而在先导式比例伺服阀阀芯运动系统中,由于系统状态不可测以及其他的外部扰动等影响,因此在设计控制器时,这些模型不确定会严重恶化系统的控制精度,甚至造成系统的失稳。对于系统中存在的非线性问题,传统的控制方法难以解决其对系统控制精度的影响。近年来,随着控制理论的发展,各种针对不确定性非线性的控制策略相继提出,如神经网络控制、鲁棒反馈控制等。
技术实现思路
1、本发明的目的在于提供一种先导式比例伺服阀鲁棒输出反馈复合控制方法,解决了先导式比例伺服阀阀芯运动系统中控制精度不高和控制器设计复杂的问题。
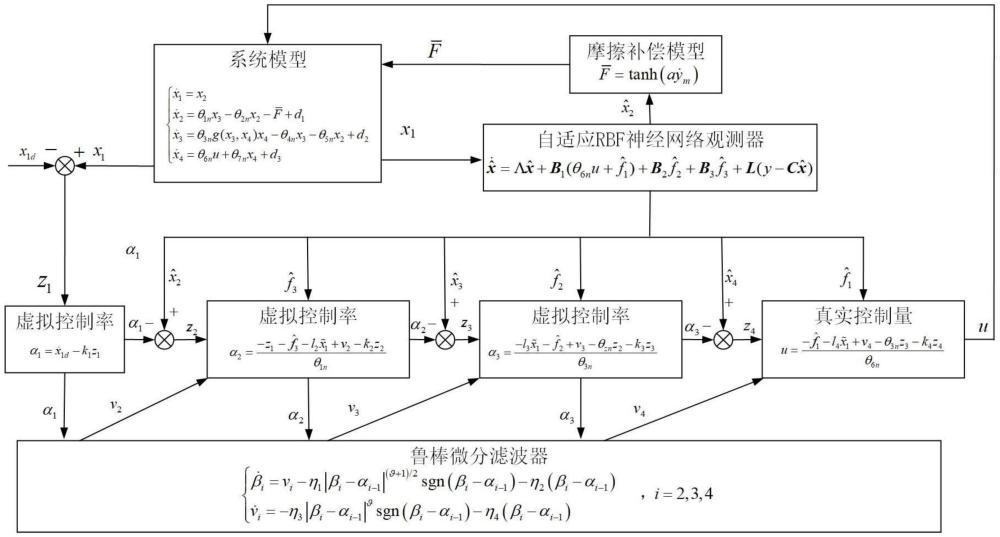
2、实现本发明目的的技术解决方案为:一种先导式比例伺服阀鲁棒输出反馈复合控制方法,所述方法基于神经网络与微分滤波器确定,包括以下步骤:
3、步骤1、建立先导式比例伺服阀阀芯位移数学模型。
4、步骤2、根据先导式比例伺服阀阀芯位移系统数学模型,设计基于神经网络和微分滤波器的鲁棒输出反馈控制器u,同时控制器u也作为控制量。
5、步骤3、运用李雅普诺夫稳定性定理,对所设计的所述控制器u进行稳定性证明。
6、本发明与现有技术相比,其显著优点在于:
7、(1)基于神经网络观测器,对系统的不可测状态以及外部扰动进行了估计,从而减少模型不确定性对系统控制精度的影响。
8、(2)采用二阶鲁棒微分滤波器对虚拟控制率进行滤波,有效地克服了传统反步法在面对高阶系统时产生的“微分爆炸”情况,降低了控制器的复杂度,同时保证了系统的控制精度。
技术特征:
1.一种先导式比例伺服阀鲁棒输出反馈复合控制方法,其特征在于,具体步骤如下:
2.根据权利要求1所述的先导式比例伺服阀鲁棒输出反馈复合控制方法,其特征在于:
3.根据权利要求2所述的先导式比例伺服阀鲁棒输出反馈复合控制方法,其特征在于:步骤2中设计基于神经网络和微分滤波器的鲁棒输出反馈控制器u,具体步骤如下:
4.根据权利要求3的先导式比例伺服阀鲁棒输出反馈复合控制方法,其特征在于,步骤3中,利用李雅普诺夫稳定性定理,对设计的控制器u进行稳定性证明,过程如下:
技术总结
本发明公开了一种先导式比例伺服阀鲁棒输出反馈复合控制方法,属于电液伺服控制领域,针对先导式比例伺服阀的特点,建立了先导式比例伺服阀阀芯位移系统数学模型;针对系统的不可测状态、参数不确定性和外部扰动,利用神经网络观测器进行了观测;针对反步法运用于高阶系统会导致“微分爆炸”的情况,设计了二阶鲁棒微分滤波器对虚拟控制率进行滤波,极大减轻了控制器设计的工作量;仿真实验证明,所设计的控制方法具有很好的鲁棒性,并且能够保证位置输出可以准确地跟踪期望的位置指令。
技术研发人员:胡健,王泽鸣,姚建勇,赵孝礼,邓文翔
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!