一种控制爬架动态平衡的方法与流程
本申请涉及物联网,具体是一种控制爬架动态平衡的方法。
背景技术:
1、目前很多设备或者施工平台都需要保证其工作环境是处于水平状态,并且需要进行实时调节。以目前建筑工地施工使用的爬架为例,爬架通过多个电机拉动,但是受多方因素的影响,拉动一段时间后,爬架的高度会不一致,导致爬架变形、损坏。从支撑方式上看,早期调平系统的支撑方式是三点支撑,随后出现了四点支撑,后来出现了六点支撑甚至八点支撑等。从驱动方式上看,最早的调平系统是依靠人工驱动的,后来依靠液压系统驱动,目前大部分采用机电驱动。从操作方式上看,早期调平系统是手动操作,采用液压驱动之后出现了半自动操作,随后过渡到自动操作。同时,爬架在提升过程中,由于机位较多,且机位动力、老化、型号等的不一致,导致在整体提升过程中,不能保证相对平衡,影响爬架的安全性。
技术实现思路
1、本申请的目的在于提供一种控制爬架动态平衡的方法,解决现有爬架提升过程中的不平衡问题,提高爬架的安全性和施工效率。
2、为实现上述目的,本申请公开了以下技术方案:
3、一种控制爬架动态平衡的方法,该方法包括以下步骤:
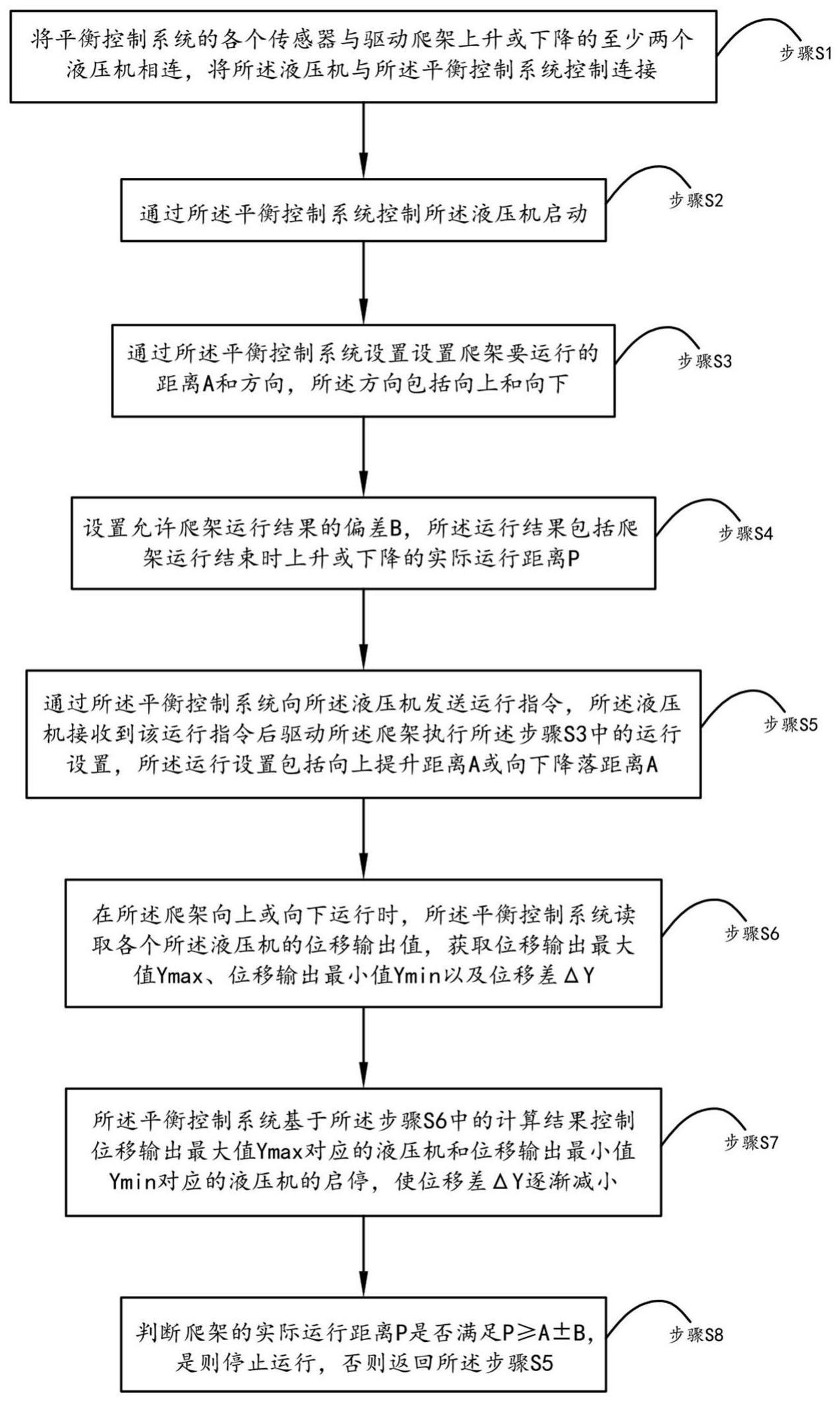
4、步骤s1:将平衡控制系统的各个传感器与驱动爬架上升或下降的至少两个液压机相连;
5、步骤s2:通过所述平衡控制系统控制所述液压机启动;
6、步骤s3:通过所述平衡控制系统设置设置爬架要运行的距离a和方向,所述方向包括向上和向下;
7、步骤s4:设置允许爬架运行结果的偏差b,所述运行结果包括爬架运行结束时上升或下降的实际运行距离p;
8、步骤s5:通过所述平衡控制系统向所述液压机发送运行指令,所述液压机接收到该运行指令后驱动所述爬架执行所述步骤s3中的运行设置,所述运行设置包括向上提升距离a或向下降落距离a;
9、步骤s6:在所述爬架向上或向下运行时,所述平衡控制系统读取各个所述液压机的位移输出值,获取位移输出最大值ymax、位移输出最小值ymin以及位移差δy;
10、步骤s7:所述平衡控制系统基于所述步骤s6中的计算结果控制位移输出最大值ymax对应的液压机和位移输出最小值ymin对应的液压机的启停,使位移差δy逐渐减小;
11、步骤s8:判断爬架的实际运行距离p是否满足p≥a±b,是则停止运行,否则返回所述步骤s5。
12、在一种实施方式中,在所述步骤s8中,当p<a±b时,若所述平衡控制系统有输入计数器的复位指令,则停止运行,否则执行所述步骤s5。
13、在一种实施方式中,所述平衡控制系统包括处理器、计数器初始化模块、自动控制模块、距离控制模块和动态平衡调节模块;
14、所述计数器初始化模块配置为用于位移传感器用计数器的参数设置、用于电源开/关后的计数器数值重新装载、用于计数器的手动复位、用于限位计数器的自动复位;
15、所述自动控制模块配置为用于在自动模式下爬架的同步上升或同步下降的输入/输出信号控制;
16、所述距离控制模块配置为用于位移传感器数据的处理以及缸位移距离的判断;
17、所述动态平衡调节模块配置为用于缸位移过程中最大值、最小值和差值的计算以及自动调节移动最快的缸和移动最慢的缸的启停。
18、在一种实施方式中,在所述步骤s3中,通过所述计数器初始化模块设置爬架要运行的距离a和方向。
19、在一种实施方式中,在所述步骤s4中,通过所述计数器初始化模块设置所述偏差b。
20、在一种实施方式中,在所述步骤s5中,通过所述自动控制模块向所述液压机发送运行指令。
21、在一种实施方式中,在所述步骤s6,通过所述距离控制模块读取各个所述液压机的位移输出值。
22、在一种实施方式中,在所述步骤s7中,通过所述自动控制模块控制液压机的启停。
23、在一种实施方式中,在所述步骤s8中,通过所述距离控制模块进行数据的比对。
24、在一种实施方式中,所述平衡控制系统还包括故障检测模块、通信处理模块、中断初始化模块、手动控制模块、压力速度控制模块、水平仪数据处理模块以及数据初始化模块;
25、所述故障检测模块配置为用于对系统信号异常进行故障检测;
26、所述通信处理模块配置为用于水平仪的通信参数设置、用于控制通信中断初始化、用于modbustcp通信设置和通信数据处理;
27、所述中断初始化模块配置为用于定时中断初始化设置;
28、所述手动控制模块配置为用于在手动模式下爬架的上升或下降输入/输出信号控制;
29、所述压力速度控制模块配置为用于对爬架的液压机输出压力和流量的控制以及液压机上升压力和下降压力的数据转换;
30、所述水平仪数据处理模块配置为用于水平仪数据的转换;
31、所述数据初始化模块配置为用于对液压机上电时数据的初始化和爬架运行模式退出时数据的初始化,所述运行模式包括手动模式和自动模式。
32、有益效果:本申请的控制爬架动态平衡的方法,解决了现有爬架提升过程中的不平衡问题,提高爬架的安全性和施工效率。
技术特征:
1.一种控制爬架动态平衡的方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的控制爬架动态平衡的方法,其特征在于,在所述步骤s8中,当p<a±b时,若所述平衡控制系统有输入计数器的复位指令,则停止运行,否则执行所述步骤s5。
3.根据权利要求1所述的控制爬架动态平衡的方法,其特征在于,所述平衡控制系统包括处理器、计数器初始化模块、自动控制模块、距离控制模块和动态平衡调节模块;
4.根据权利要求3所述的控制爬架动态平衡的方法,其特征在于,在所述步骤s3中,通过所述计数器初始化模块设置爬架要运行的距离a和方向。
5.根据权利要求3所述的控制爬架动态平衡的方法,其特征在于,在所述步骤s4中,通过所述计数器初始化模块设置所述偏差b。
6.根据权利要求3所述的控制爬架动态平衡的方法,其特征在于,在所述步骤s5中,通过所述自动控制模块向所述液压机发送运行指令。
7.根据权利要求3所述的控制爬架动态平衡的方法,其特征在于,在所述步骤s6,通过所述距离控制模块读取各个所述液压机的位移输出值。
8.根据权利要求3所述的控制爬架动态平衡的方法,其特征在于,在所述步骤s7中,通过所述自动控制模块控制液压机的启停。
9.根据权利要求3所述的控制爬架动态平衡的方法,其特征在于,在所述步骤s8中,通过所述距离控制模块进行数据的比对。
10.根据权利要求2所述的控制爬架动态平衡的方法,其特征在于,所述平衡控制系统还包括故障检测模块、通信处理模块、中断初始化模块、手动控制模块、压力速度控制模块、水平仪数据处理模块以及数据初始化模块;
技术总结
本申请涉及物联网技术领域,公开了一种控制爬架动态平衡的方法,包括:步骤S1:将平衡控制系统与驱动爬架的液压机相连;步骤S2:通过平衡控制系统控制液压机启动;步骤S3:通过平衡控制系统设置设置爬架要运行的距离A和方向;步骤S4:设置允许爬架运行结果的偏差B;步骤S5:通过平衡控制系统向液压机发送运行指令;步骤S6:读取各个液压机的位移输出值;步骤S7:基于步骤S6中的计算结果控制各个液压机的启停;步骤S8:判断爬架的实际运行距离P是否满足P≥A±B,是则停止运行,否则返回步骤S5。本申请解决了现有爬架提升过程中的不平衡问题,提高爬架的安全性和施工效率。
技术研发人员:张路,陶建伟,杨一凡,朱马进
受保护的技术使用者:广州达蒙安防科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!