基于步进电机、引导阀和主配压阀的调速器液压随动系统的制作方法
本技术涉及一种调速器液压随动系统,具体涉及一种基于步进电机、引导阀和主配压阀的调速器液压随动系统。
背景技术:
1、中国专利“一种调速器液压随动系统中位自动智能整定系统及方法”(专利号:zl201910024102.x)公开了一种采用比例阀和主配、接力器作为执行机构形式的调速器液压随动系统。而比例阀作为精密液压元件,对液压系统液压油的油质要求很高,可能会因为液压油中含有的固体颗粒物杂质导致阀体卡涩,从而影响采用比例阀作为电液转换装置的调速器液压随动系统的正常运行,故需研究探索一种新的不易发生阀体卡涩,采用其他电液转换和执行机构形式的调速器液压随动系统。
技术实现思路
1、为解决上述技术问题,本实用新型提供一种基于步进电机、引导阀和主配压阀的调速器液压随动系统,适用于水电机组调速器进行机组导叶开度控制,旨在降低电液转换和执行结构发生卡涩概率,提高调速器液压随动系统工作可靠性,降低故障率。
2、本实用新型采取的技术方案为:
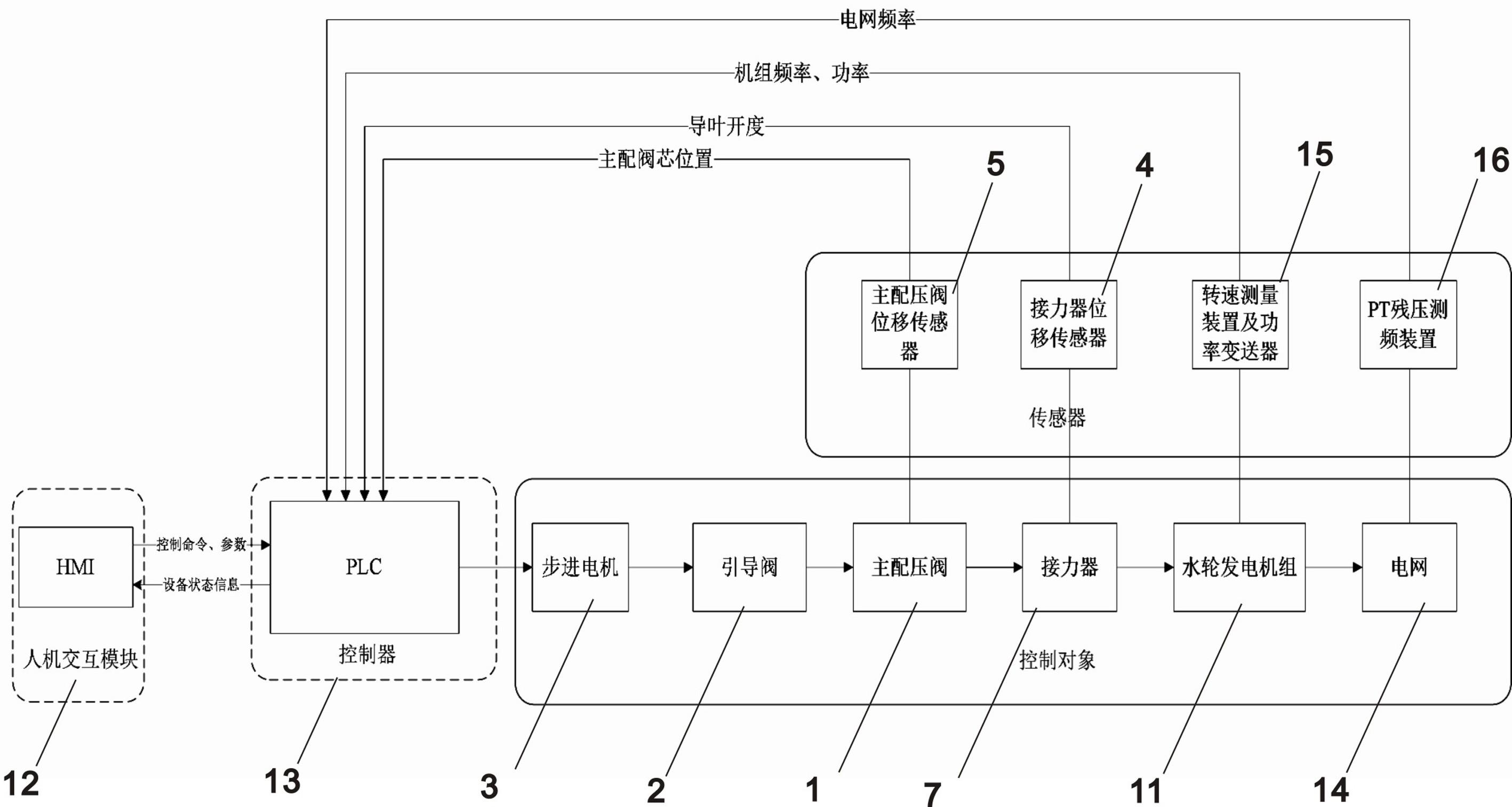
3、基于步进电机、引导阀和主配压阀的调速器液压随动系统,该系统包括:
4、人机交互模块、控制器、步进电机、引导阀、主配压阀;
5、控制器连接步进电机,步进电机连接引导阀,引导阀连接主配压阀,主配压阀连接接力器;主配压阀设有第一位移传感器,用于测量主配压阀阀芯位置,第一位移传感器连接控制器。所述人机交互模块,将调速器液压随动系统主配压阀电气中位设定值参数,以及控制命令输入控制器。
6、所述控制器,根据主配压阀位置给定与主配压阀位置反馈的差值大小来控制步进电机位移,从而来控制引导阀位置,主配压阀位置跟随引导阀位置的机械负反馈闭环来共同实现。
7、所述接力器设有第二位移传感器,第二位移传感器连接控制器。
8、所述接力器连接水轮发电机组,水轮发电机组设有转速测量装置及功率变送器。
9、一种主配压阀-引导阀位置闭环控制方法,
10、根据主配压阀位置给定与主配压阀位置反馈的差值大小来控制步进电机位移,从而来控制引导阀位置,主配压阀位置跟随引导阀位置的机械负反馈闭环来共同实现。
11、当引导阀的阀芯向下移动时,引导阀的p油口和a油口连通,主配压阀的y端通压力油,主配压阀阀芯向下移动,导致引导阀的阀套向下移动,当引导阀的阀芯和阀套移动的位移相同后,引导阀的p油口和a油口不连通,此时机械跟随系统进入稳态;
12、当引导阀的阀芯向上移动时,引导阀的t油口和a油口连通,主配压阀的y端通无压力回油,主配压阀阀芯向上移动,导致引导阀的阀套向上移动,当引导阀的阀芯和阀套移动的位移相同后,引导阀的t油口和a油口不连通,此时机械跟随系统进入稳态;
13、通过上述方式,实现了主配阀芯位置跟随引导阀阀芯位置的机械负反馈闭环。
14、本实用新型一种基于步进电机、引导阀和主配压阀的调速器液压随动系统,技术效果如下:1)本实用新型调速器液压随动系统采用步进电机、引导阀和主配压阀的组合作为电液转换和执行机构,降低电液转换和执行结构发生卡涩概率,提高调速器液压随动系统工作可靠性,降低故障率。
15、2)本实用新型所述主配阀芯位置跟随引导阀阀芯位置的机械负反馈闭环,与传统电气负反馈闭环相比中间环节更少,无电气环节,结构更简单紧凑,速动性更好,可靠性更高。
技术特征:
1.基于步进电机、引导阀和主配压阀的调速器液压随动系统,其特征在于,该系统包括:人机交互模块(12)、控制器(13)、步进电机(3)、引导阀(2)、主配压阀(1);
2.根据权利要求1所述基于步进电机、引导阀和主配压阀的调速器液压随动系统,其特征在于:所述人机交互模块(12),将调速器液压随动系统主配压阀电气中位设定值参数,以及控制命令输入控制器(13)。
3.根据权利要求1所述基于步进电机、引导阀和主配压阀的调速器液压随动系统,其特征在于:所述控制器(13),根据主配压阀位置给定与主配压阀位置反馈的差值大小来控制步进电机(3)位移,从而来控制引导阀(2)位置。
4.根据权利要求1所述基于步进电机、引导阀和主配压阀的调速器液压随动系统,其特征在于:所述接力器(7)设有第二位移传感器(4),第二位移传感器(4)连接控制器(13)。
5.根据权利要求1所述基于步进电机、引导阀和主配压阀的调速器液压随动系统,其特征在于:所述接力器(7)连接水轮发电机组(11),水轮发电机组(11)设有转速测量装置及功率变送器(15)。
技术总结
基于步进电机、引导阀和主配压阀的调速器液压随动系统,该系统包括:人机交互模块、控制器、步进电机、引导阀、主配压阀;控制器连接步进电机,步进电机连接引导阀,引导阀连接主配压阀,主配压阀连接接力器;主配压阀设有第一位移传感器,用于测量主配压阀阀芯位置,第一位移传感器连接控制器。根据主配压阀位置给定与主配压阀位置反馈的差值大小来控制步进电机位移,从而来控制引导阀位置,主配压阀位置跟随引导阀位置的机械负反馈闭环来共同实现。本技术提供一种基于步进电机、引导阀和主配压阀的调速器液压随动系统,旨在降低电液转换和执行结构发生卡涩概率,提高调速器液压随动系统工作可靠性,降低故障率。
技术研发人员:涂勇
受保护的技术使用者:中国长江电力股份有限公司
技术研发日:20230523
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!