一种伺服电机及机器狗的制作方法
一种伺服电机及机器狗
【技术领域】
1.本实用新型涉及机器人技术领域,特别涉及一种伺服电机及机器狗。
背景技术:
2.机器狗作为四足机器人具有对复杂地形很强的适应能力、很高的运动自主性和较高的导航智能性。其主要包括机身和肢体,机身容纳了传感器、控制器、电源等若干部件,肢体用于行动,包括行走、跨越障碍和跳动。
3.伺服电机系统可用于驱动肢体行动,但目前市面上的大部分伺服电机机器狗,由于伺服电机在运转的时候,电机的振动比较大,并且在机器狗运动行走时,电机所受到轴向力比较大,导致电机的行星轮支架受到很大的轴向冲击。此时,电机的内齿圈和轴承也产生很大的轴向振动,最后会因内齿圈和轴承损伤而导致机器狗运行不平稳甚至提前失效。
4.因此,有必要对现有技术予以改良以克服现有技术中的所述缺陷。
技术实现要素:
5.本实用新型的目的在于提供一种运行平稳的伺服电机及机器狗。
6.本实用新型的目的是通过以下技术方案实现:
7.一种伺服电机,包括:
8.壳体;
9.电机主体,设于所述壳体内;
10.行星减速组件,设于所述壳体内,所述电机主体连接并驱动所述行星减速组件,所述行星减速组件包括内齿圈和啮合在所述内齿圈内侧的行星轮;
11.内齿圈压板,固定在所述壳体内,所述内齿圈压板包括至少部分压设在所述内齿圈轴向一侧上的压紧部,并向另一侧压紧所述内齿圈。
12.在其中一个实施例中,所述内齿圈压板位于所述内齿圈外侧,所述压紧部至少部分压设在所述内齿圈的外侧面上,并向所述内齿圈的内侧面方向压紧所述内齿圈。
13.在其中一个实施例中,所述内齿圈位于所述行星轮和所述内齿圈压板之间,所述内齿圈压板向所述行星轮方向压紧所述内齿圈。
14.在其中一个实施例中,所述壳体包括容纳所述行星减速组件的齿轮箱座,所述内齿圈压板固定在所述齿轮箱座上。
15.在其中一个实施例中,所述内齿圈压板还包括与所述压紧部相连的固定部,至少部分所述固定部沿所述内齿圈轴向方向嵌入所述齿轮箱座。
16.在其中一个实施例中,所述内齿圈压板和所述齿轮箱座上分别开设有相对应的螺丝孔,紧固螺丝穿设于所述螺丝孔中将所述内齿圈压板固定在所述齿轮箱座上。
17.在其中一个实施例中,还包括:
18.轴承圈;
19.所述行星减速组件还包括行星轮轴和支承所述行星轮轴的行星轮支架,所述行星
轮轴设于所述行星轮的中心轴孔中,所述轴承圈设于所述行星轮支架和所述齿轮箱座之间。
20.在其中一个实施例中,所述轴承圈位于所述内齿圈轴向的一侧,所述内齿圈压板由所述内齿圈轴向的另一侧压紧所述内齿圈和轴承圈。
21.在其中一个实施例中,所述行星轮、内齿圈和内齿圈压板各具有彼此位于同一平面上的侧面。
22.一种机器狗,包括如上述任一项所述的伺服电机,还包括:
23.行动部,所述伺服电机连接并驱动所述行动部,所述机器狗在所述行动部的带动下行走或跳跃。
24.与现有技术相比,本实用新型具有如下有益效果:本实用新型伺服电机及机器狗,其伺服电机结构设计分布合理,巧妙添加和应用内齿圈压板固定住行星减速组件及轴承,减少零部件多余的间隙,增强部件排布的紧密度,提高抵抗电机输出振动和外部轴向冲击力的能力,防止内齿圈和轴承圈等损伤导致的伺服电机失效,延长了伺服电机及应用该电机的机器狗的寿命,并使伺服电机及机器狗运行更加平稳。
【附图说明】
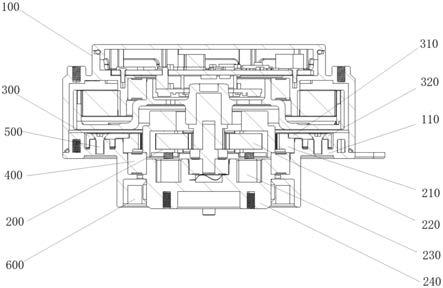
25.图1是本实用新型伺服电机纵截面剖视图;
26.图2是本实用新型伺服电机横截面剖视图;
27.图3是本实用新型伺服电机立体图。
28.图中的相关元件对应编号如下:
29.100
‑
壳体,
30.110
‑
齿轮箱座,
31.200
‑
行星减速组件,
32.210
‑
内齿圈,
33.220
‑
行星轮,
34.230
‑
行星轮轴,
35.240
‑
行星轮支架,
36.300
‑
内齿圈压板,
37.310
‑
压紧部,
38.320
‑
固定部,
39.400
‑
轴承圈,
40.500
‑
紧固螺丝,
41.600
‑
油封圈。
【具体实施方式】
42.在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对
本技术保护范围的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
43.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本技术中的具体含义。
44.图1是本实用新型伺服电机纵截面剖视图;图2是本实用新型伺服电机横截面剖视图;图3是本实用新型伺服电机立体图。
45.请参阅图1至图3所示,一种伺服电机,包括:壳体、电机主体、行星减速组件200和内齿圈压板300。电机主体设置在壳体内,其包括定子和转子。壳体内侧固定和保护电机主体,包括用于固定定子,壳体外侧与外部结构相固定,其多采用硬铝或不锈钢制成。行星减速组件200作为电机减速组件设于上述壳体内,电机主体连接并驱动行星减速组件200,行星减速组件200进而连接外部待驱动部件,使电机经减速组件对外输出功率。本实施例中的行星减速组件200包括内齿圈210和啮合在内齿圈210内侧的行星轮 220。行星轮220或称行星齿轮,其齿轮除了能像定轴齿轮围绕自身转动轴转动之外,它们的转动轴还绕其它齿轮的轴线转动。而内齿圈210为具有内齿的圆环形齿圈,行星轮220中齿轮外齿与内齿圈210的内齿啮合,行星轮 220进而在内齿圈210中运行,形成变速机构。行星减速组件200具有高载荷和大传动比等优点,但是伺服电机在运行时受轴向冲击影响时,行星减速组件200在内的电机零部件容易产生轴向移动,为了解决这一问题,实施例中设置有内齿圈压板300。内齿圈压板300固定在壳体内,内齿圈压板300包括至少部分压设在内齿圈210轴向一侧上的压紧部310,并向另一侧压紧内齿圈210,从而使内齿圈210受到轴向冲击力时,固定住内齿圈210,保证内齿圈210不会产生轴向移动,从而对伺服电机的平稳运行和寿命进行保证。
46.上述所谓轴向为电机主轴或输出轴所在轴线方向,伺服电机作为机器人或机器狗等设备的动力输出源工作时,容易沿轴向产生振动。这既包括了伺服电机本身运行时产生的振动,同时也包括机器人或机器狗等设备运动行走时,电机所受的轴向外力。在满足伺服电机正常工作的基础上,实施例增强了电机的防轴向冲击力的能力,解决电机因轴向冲击力过大而导致失效的问题。
47.在其中一个实施例中,由电机主轴向外,内外分布有电机主体、行星轮220、内齿圈210和内齿圈压板300。内齿圈压板300位于内齿圈210外侧,为了提高对内齿圈210的压紧效果,上述压紧部310至少部分压设在内齿圈 210的外侧面上,并向内齿圈210的内侧面方向压紧内齿圈210。压紧部310 为直接压迫内齿圈210的部分内齿圈压板300结构。本实施例中,压紧部310 除了至少部分压设在内齿圈210轴向一侧上,还压设在内齿圈210的外侧面上,从而同时在轴向和水平方向上压迫、压紧内齿圈210,提高固定效果。相应的,内齿圈压板300的压紧部310在结构上可设置为楔形,并与内齿圈 210外侧一端紧贴。当然,阶梯型或其他形状的压紧部310,只要可实现相同效果都可以采用,本技术对此不作限制。内齿圈压板300与壳体完全固定,固定可由内齿圈压板300除压紧部310外其他部分实现,从而实现内
齿圈压板300及其压紧部310所处位置的相对稳定,保证对内齿圈210的固定效果。
48.进一步的,在其中一个实施例中,内齿圈210可设置位于行星轮220和内齿圈压板300之间,内齿圈压板300向行星轮220方向压紧内齿圈210。由于行星轮220的结构和工作状态较为复杂,存在一定的振动和噪声问题,而行星轮220的输入轴和输出轴处在同一水平线上。则内齿圈压板300向行星轮220方向压紧内齿圈210,可以减少内齿圈210和行星轮220之间、行星轮 220各齿轮之间的振动,减轻噪音,防止行星轮220轮齿疲劳点蚀、齿根裂纹乃至轮齿或轴断裂等失效现象。最终提高了伺服电机的运行精度、传递效率和使用寿命。
49.在其中一个实施例中,壳体包括容纳行星减速组件200的齿轮箱座110,齿轮箱座110主要用于容纳行星减速组件200等,位置相对固定。齿轮箱座 110承受来自电机的作用力和齿轮传动时产生的反力,必须具有足够的刚性去承受力和力矩的作用,防止变形,保证传动质量。齿轮箱座110本身也具有较强的结构强度,本实施例中,内齿圈压板300固定在齿轮箱座110上,达到固定位置的效果,不易因外力作用和电机振动而松动。
50.在其中一个实施例中,内齿圈压板300还包括与压紧部310相连的固定部320,至少部分固定部320沿内齿圈210轴向方向嵌入齿轮箱座110,从而提高内齿圈压板300的固定效果,尤其防止内齿圈210在水平方向上的位移。制造本实施例所用齿轮箱座110时,与内齿圈压板300相应位置预留有供其固定部320嵌入的凹槽,凹槽预留深度应略大于嵌入的固定部320的长度。优选的,固定部320具有内外间隔分布的一对嵌入部分。
51.从而提高内齿圈压板300的固定效果,尤其防止内齿圈210在轴向或竖直方向上的位移。在其中一个实施例中,内齿圈压板300和齿轮箱座110上分别开设有相对应的螺丝孔,紧固螺丝500穿设于螺丝孔中将内齿圈压板 300固定在齿轮箱座110上。紧固螺丝500可沿电机轴向设置,将内齿圈压板 300与齿轮箱座110上下固定。优选的,紧固螺丝500穿设于内齿圈压板300 的固定部320中,一对上述嵌入部分之间。
52.在其中一个实施例中,本技术的伺服电机还包括轴承圈400,而行星减速组件200还包括行星轮轴230和行星轮支架240。行星轮轴230用作行星减速组件200的一级减速结构,一般是装入行星轮220的中心轴孔中,或者在行星减速组件200中作为行星轮系的一部分。行星轮轴230总成作用于行星轮系中,其作用在于限制行星轮220的轴向运动。本实施例的行星轮支架240 用于支承行星轮轴230,并对行星轮轴230起限位作用,为实现效果,行星轮轴230部分穿设在行星轮支架240中。轴承圈400是具有一个或几个滚道的向心滚动轴承的环形零件,本实施例的轴承圈400设于行星轮支架240和齿轮箱座110之间,对行星轮支架240和齿轮箱座110提供稳定的支承和定位。由于轴承圈400的精度比普通零部件精度高,所以经过轴承圈400的连接配合方式,可以保证伺服电机的行星轮支架240和齿轮箱座110的同心度更加良好。
53.在其中一个实施例中,轴承圈400位于内齿圈210轴向的一侧,内齿圈压板300由内齿圈210轴向的另一侧压紧内齿圈210和轴承圈400。实施例中,内齿圈压板300压住内齿圈210及其下方的轴承圈400,紧密的排布可有效缓解伺服电机在运转时,因产生的轴向振动对轴承和内齿圈210所造成的轴向冲击,从而解决伺服电机运行不平稳和使用寿命短的问题。
54.前述的内齿圈210为套设在行星轮220外侧上的环形件,内齿圈压板300 同样是与内齿圈210对应相应设置的环形件。相应的,内齿圈压板300的压紧部310也呈环状,从而在
周向范围压固内齿圈210,减轻振动。在其中一个实施例中,行星轮220、内齿圈210和内齿圈压板300各具有彼此位于同一平面上的侧面,从而便于利用壳体上的平面构件对三者进行限位。本实施例中,上述侧面为内齿圈210轴向一侧的侧面。
55.在其中一个实施例中,伺服电机还包括:油封600圈。油封600圈是用来封油脂的机械元件,它将传动部件中需要润滑的部件与出力部件隔离,不至于让润滑油渗漏。本实施例的油封600圈设于行星轮支架240和齿轮箱座110之间,并密封行星轮支架240和齿轮箱座110之间的空隙,从而提高行星轮支架240和齿轮箱座110之间的密封效果,防止润滑油泄漏、并防水防尘进入。其中,油封600圈和轴承圈400的轴线重合,以保证两者同心度,防止伺服电机运行过程中,油封600圈发生偏移。
56.在其中一个实施例中,油封600圈和轴承圈400分别位于行星轮支架240 的两端。行星轮支架240上端和齿轮箱座110通过轴承圈400来衔接。行星轮支架240下端与齿轮箱座110之间形成油封600,通过塞入油封600圈与齿轮箱座110间接接触。由于轴承圈400的精度比普通零部件精度高,所以经过轴承圈400的连接配合方式可以保证伺服电机的行星轮支架240和齿轮箱座 110的同心度更加良好,从而会使下端的油封600的防水、防尘性更加可靠。
57.本技术实施例还公开了一种机器狗,包括如上述任一项的伺服电机,还包括:行动部。其中,伺服电机连接并驱动行动部,机器狗在行动部的带动下行走或跳跃。本实施例中,伺服电机通过前述行星减速组件200进而连接外部待驱动部件即行动部。在不同的实施例中,机器狗的机身容纳有伺服电机在内的若干部件,可以具有电气传感系统、运动控制系统、视觉感知系统、高速网络通讯系统等部分,机身下方连接的肢体作为机器狗的行动部,并具有关节。本实施例机器狗可以满足各种高动态运动控制和步态规划开发的需要,包括行走、跳跃等,利用运行平稳、抗振优良的伺服电机,防止机器狗运行不平稳甚至提前失效,提高使用寿命。
58.与现有技术相比,本实用新型具有如下有益效果:本实用新型伺服电机及机器狗,其伺服电机结构设计分布合理,巧妙添加和应用内齿圈压板固定住行星减速组件及轴承,减少零部件多余的间隙,增强部件排布的紧密度,提高抵抗电机输出振动和外部轴向冲击力的能力,防止内齿圈和轴承圈等损伤导致的伺服电机失效,延长了伺服电机及应用该电机的机器狗的寿命,并使伺服电机及机器狗运行更加平稳。
59.以上述依据本技术的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项申请技术思想的范围内,进行多样的变更以及修改。本项申请的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1