一种耐冲击柔性手腕的制作方法
本发明属于核设施退役拆除,具体涉及一种耐冲击柔性手腕。
背景技术:
1、核设施使用期满或因其他原因停止服役后需要进行退役处理,退役处理主要包括去污、设备的解体、构筑物的拆除、放射性废物的处理等。构筑物的拆除作业包含放射性混凝土结构及其他放射性硬质脆性材料的拆除,现有技术一般通过远程遥控搭载有冲击破碎装置的机械臂进行放射性混凝土结构及其他放射性硬质脆性材料的冲击破碎拆除作业,由于冲击破碎装置与机械臂刚性连接,冲击破碎拆除过程中的振动载荷会施加给机械臂,导致机械臂损坏。
2、目前,还缺少一种能够有效降低冲击破碎装置与机械臂之间振动载荷的装置。
技术实现思路
1、本发明要解决的技术问题是:如何有效降低冲击破碎装置与机械臂之间的振动载荷。
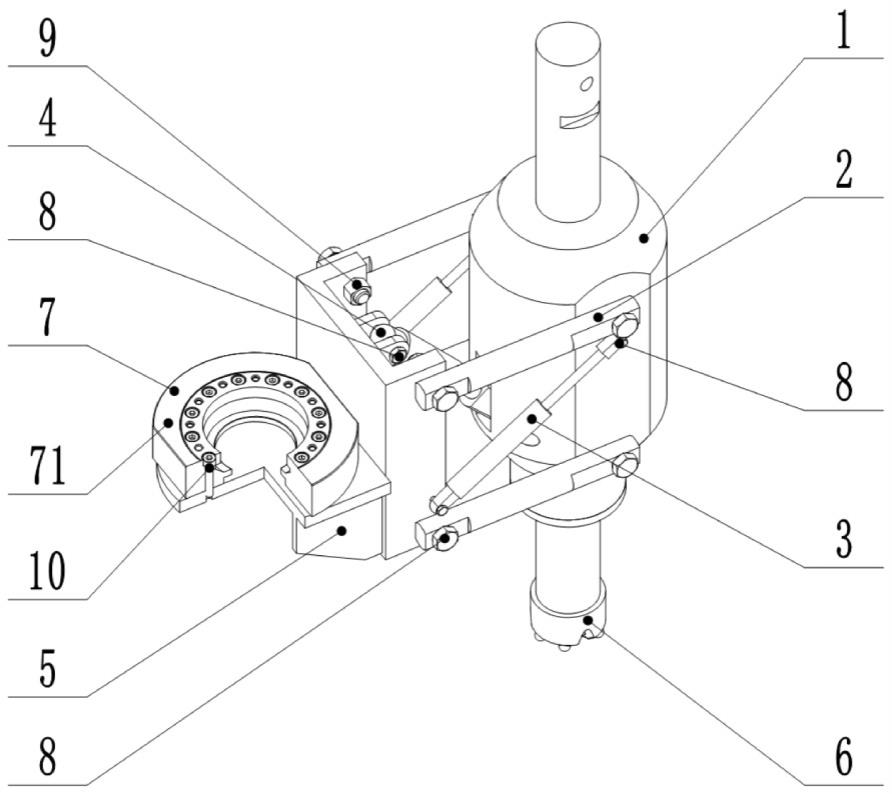
2、为解决上述问题,本发明提供了一种耐冲击柔性手腕,主要由质量块、连杆、第一弹簧阻尼器、第二弹簧阻尼器、适配器组成。所述的质量块与冲击破碎装置固定联接;所述的适配器一端与机械臂末端夹持器固定联接,适配器的另一端通过连杆、第一弹簧阻尼器、第二弹簧阻尼器与质量块柔性铰接联接;冲击破碎装置工作过程中振动的方向与铰接方向垂直,可有效降低冲击破碎装置与机械臂之间的振动载荷,振动能量通过第一弹簧阻尼器、第二弹簧阻尼器转化为热能,实现振动能量的吸收转化。
3、所述的质量块、连杆、适配器联接组成平行连杆机构。
4、所述的连杆数量为n,4≤n≤8。
5、所述的第一弹簧阻尼器安装在质量块两侧,第二弹簧阻尼器安装在质量块的中间,第一弹簧阻尼器与第二弹簧阻尼器反向布置,实现质量块位置的保持。
6、本发明具有以下有益效果:
7、能够有效降低冲击破碎装置与机械臂之间的振动载荷,降低因振动载荷传递至机械臂导致机械臂损坏的风险。结构简单、可靠性高。
技术特征:
1.一种耐冲击柔性手腕,其特征在于主要由质量块、连杆、第一弹簧阻尼器、第二弹簧阻尼器、适配器组成;所述的质量块与冲击破碎装置固定联接;所述的适配器一端与机械臂末端夹持器固定联接,适配器的另一端通过连杆、第一弹簧阻尼器、第二弹簧阻尼器与质量块柔性铰接联接;冲击破碎装置工作过程中振动的方向与铰接方向垂直,可有效降低冲击破碎装置与机械臂之间的振动载荷,振动能量通过第一弹簧阻尼器、第二弹簧阻尼器转化为热能,实现振动能量的吸收转化。
2.根据权利要求1所述的一种耐冲击柔性手腕,其特征在于所述的质量块、连杆、适配器联接组成平行连杆机构。
3.根据权利要求1所述的一种耐冲击柔性手腕,其特征在于所述的连杆数量为n,4≤n≤8。
4.根据权利要求1所述的一种耐冲击柔性手腕,其特征在于所述的第一弹簧阻尼器安装在质量块两侧,第二弹簧阻尼器安装在质量块的中间,第一弹簧阻尼器与第二弹簧阻尼器反向布置,实现质量块位置的保持。
技术总结
本发明提供了一种耐冲击柔性手腕,主要由质量块、连杆、第一弹簧阻尼器、第二弹簧阻尼器、适配器组成。质量块与冲击破碎装置固定联接,适配器一端与机械臂末端夹持器固定联接,适配器的另一端通过连杆、第一弹簧阻尼器、第二弹簧阻尼器与质量块柔性铰接联接,组成平行连杆机构。冲击破碎装置工作过程中振动的方向与铰接方向垂直,可有效降低冲击破碎装置与机械臂之间的振动载荷,振动能量通过第一弹簧阻尼器、第二弹簧阻尼器转化为热能,实现振动能量的吸收转化。本发明能够有效降低冲击破碎装置与机械臂之间的振动载荷,降低因振动载荷传递至机械臂导致机械臂损坏的风险。结构简单、可靠性高。
技术研发人员:周文,赵战国,魏猛,刘再盛,白春淼,张鑫
受保护的技术使用者:北京雷蒙赛博核装备技术研究有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!