一种行走装置及控制方法与流程
1.本发明实施例涉及巡检设备领域,尤其涉及一种行走装置及控制方法。
背景技术:
2.当今社会电力系统的重要性不言而喻,通常电力系统站内设备数量繁多,管线复杂,密集程度高,因此为了对电力系统及时进行设备运维和抢修工作,电力系统巡检成为一项尤其重要的工作。
3.目前,电力系统巡检通常采用安装有高清摄像头的轨道式巡检设备,通过使用高清摄像头采集图像以完成巡检工作。而传统的轨道式巡检设备的行走装置,在通过弧形轨道的弯道时,往往会出现跑偏,歪斜,晃动等现象,甚至会导致巡检装置的损坏。
技术实现要素:
4.本发明实施例提供一种行走装置及控制方法,以解决传统行走装置通过弧形轨道的弯道时,所出现跑偏,歪斜,晃动的问题。
5.为了解决上述技术问题,本发明实施例是这样实现的:
6.本发明实施例提供了一种行走装置,该行走装置包括:滑动轮组、“工”字形的轨道、传动机构、驱动机构、安装平台和导向机构。该滑动轮组包括:背轮、走行轮和轮架,该滑动轮组为偶数个,分别对称安装于该“工”字形的轨道的内侧的上下底面上;该滑动轮组、该传动机构、该驱动机构和该导向机构分别安装于该安装平台;该导向机构,第一端安装于该安装平台,第二端止抵于该“工”字形的轨道外侧面;在运行过程中,该第二端紧贴该“工”字形的轨道外侧面滑动;该驱动机构可通过该传动机构带动该安装平台沿该“工”字形的轨道运动。
7.可选的,“工”字形的轨道包括:位于上底面下侧的第一轨道面、位于下底面上侧的第二轨道面、以及下底面两侧的第三轨道面;背轮止抵于该第一轨道面,走行轮止抵于该第二轨道面,该背轮的中轴与该走行轮的中轴通过该轮架固定在该安装平台上。
8.可选的,导向机构包括:压簧、导向固定板、导向转轴、导向活动板和导向轮;该导向固定板固定连接该安装平台;该压簧的一端连接该导向固定板,另一端连接该导向活动板;该压簧给该导向轮提供预紧,使该导向轮在运行过程中,始终紧贴该“工”字形的轨道外侧面滑动。
9.可选的,导向轮通过该导向转轴连接在该导向活动板上,该导向轮可绕该导向转轴按一定角度旋转;在运行过程中,该导向轮能够按照该“工”字形的轨道的弧度调整旋转角度,并通过该压簧提供预紧力,使该导向轮始终紧贴该“工”字形的轨道外侧面滑动。
10.可选的,传动机构包括:相互啮合的齿轮和齿条;该齿轮安装在该安装平台上,该齿条沿该“工”字形的轨道安装;该驱动机构通过带动该齿轮沿该齿条运动,进而带动该安装平台沿该“工”字形的轨道运动。
11.可选的,行走装置还包括:限位装置,该限位装置包括:安装于该“工”字形的轨道
上的限位撞块和安装于该轮架上的限位开关;在运行过程中,当该限位撞块与该限位开关接触时,该行走装置停止运行。
12.可选的,行走装置还包括:控制装置,控制装置包括:相互电连接的编码器、驱动器和控制电路板;编码器安装在驱动机构上,用于检测驱动机构的速度和位置;驱动器连接驱动机构,可控制驱动机构的转速和转向;控制电路板,可通过编码器和驱动器,控制驱动机构带动行走装置沿所述“工”字形的轨道运动或停止。
13.本发明实施例提供一种控制方法,应用于行走装置,该行走装置包括:滑动轮组、“工”字形的轨道、传动机构、驱动机构、安装平台和导向机构;该滑动轮组包括:背轮、走行轮和轮架,该滑动轮组为偶数个,分别对称安装于该“工”字形的轨道的内侧的上下底面上;该滑动轮组、该传动机构、该驱动机构和该导向机构分别安装于该安装平台;该导向机构,第一端安装于该安装平台,第二端止抵于该“工”字形的轨道外侧面;在运行过程中,该第二端紧贴该“工”字形的轨道外侧面滑动;该方法包括:该驱动机构可控制该传动机构带动
14.可选的,该行走装置还包括:限位装置,该限位装置包括:安装于该“工”字形的轨道上的限位撞块和安装于该轮架上的限位开关,该方法还包括:在运行过程中,当该限位撞块与该限位开关接触时,该驱动机构可控制该行走装置停止运行。
15.可选的,该行走装置还包括:控制装置,该控制装置包括:相互电连接的编码器、驱动器和控制电路板;该方法包括:控制电路板接收编码器反馈的第一信号,该第一信号用于表征驱动机构的速度和位置;控制电路根据该第一信号向驱动器发送控制驱动机构的转速和转向的第二信号。
16.本发明实施例提供的行走装置包括:滑动轮组、“工”字形的轨道、传动机构、驱动机构、安装平台和导向机构。该滑动轮组包括:背轮、走行轮和轮架,该滑动轮组为偶数个,分别对称安装于该“工”字形的轨道的内侧的上下底面上;该滑动轮组、该传动机构、该驱动机构和该导向机构分别安装于该安装平台;该导向机构,第一端安装于该安装平台,第二端止抵于该“工”字形的轨道外侧面;在运行过程中,该第二端紧贴该“工”字形的轨道外侧面滑动;该驱动机构可通过该传动机构带动该安装平台沿该“工”字形的轨道运动。通过该方案,一方面,由于本技术采用“工”字形的轨道,且滑动轮组分别对称安装于“工”字形的轨道的内侧的上下底面上,使得受力更加平衡,滑动轮组的运行更加平稳;另一方面,本技术通过增加导向机构,且设置导向机构的一端抵于该“工”字形的轨道外侧面,从而使得该行走装置在运动过程中,导向机构始终能够紧贴轨道,进而可以有效避免通过弧形轨道的弯道时,所出现跑偏,歪斜,晃动等问题。
附图说明
17.图1为本发明实施例提供的一种行走装置的主视图;
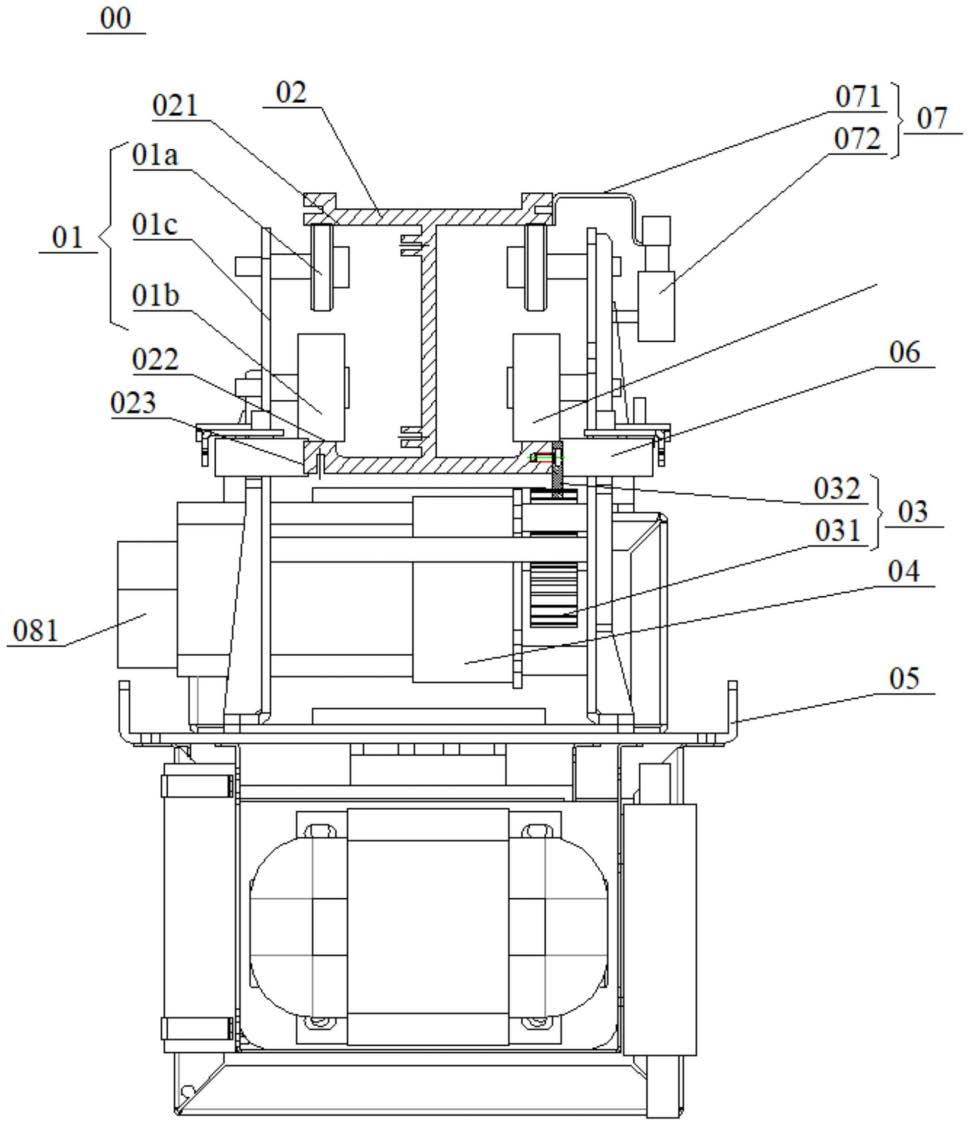
18.图2为本发明实施例提供的一种行走装置的半剖侧视图;
19.图3为本发明实施例提供的一种行走装置的俯视图;
20.图4为本发明实施例提供的一种行走装置拆去轨道的侧视图;
21.图5为本发明实施例提供的一种配合行走装置安装的伸缩装置及摄像头单元的示意图;
22.图6为本发明实施例提供的一种行走装置的控制方法图。
23.附图中的标号说明:00-行走装置、01-滑动轮组、01a-背轮、01b-走形轮、01c-轮架、02
‑“
工”字形的轨道、021-第一轨道面、022-第二轨道面、023-第三轨道面、03-传动机构、031-齿轮、032-齿条、04-驱动机构、05-安装平台、06-导向机构、061-压簧、062-导向固定板、063-导向转轴、064-导向活动板、065-导向轮、07-限位装置、071-限位撞快、072-限位开关、08-控制装置、081-驱编码器、082-驱动器、083-控制电路板、091-交换机、092-开关电源、093-通信载波模块、094-变压器、095-伸缩装置、096-避障传感器、097-摄像头单元。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.本文中术语“和/或”,是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。本文中符号“/”表示关联对象是或者的关系,例如a/b表示a或者b。
26.本发明的说明书和权利要求书中的术语“第一”和“第二”等是用于区别不同的对象,而不是用于描述对象的特定顺序。例如,第一伸缩管和第二伸缩管等是用于区别不同的传动机构,而不是用于描述传动机构的特定顺序。
27.在本发明实施例中,“示例性的”或者“例如”等词用于表示作例子、例证或说明。本发明实施例中被描述为“示例性的”或者“例如”的任何实施例或设计方案不应被解释为比其它实施例或设计方案更优选或更具优势。确切而言,使用“示例性的”或者“例如”等词旨在以具体方式呈现相关概念。
28.在本发明实施例的描述中,除非另有说明,“多个”的含义是指两个或者两个以上,例如,多个元件是指两个或者两个以上的元件等。
29.实施例一、
30.如图1所示,本发明实施例提供一种行走装置00包括:滑动轮组01、“工”字形的轨道02、传动机构03、驱动机构04、安装平台05和导向机构06。该滑动轮组01包括:背轮01a、走行轮01b和轮架01c,该滑动轮组01为偶数个,分别对称安装于该“工”字形的轨道02的内侧的上下底面上;该滑动轮组01、传动机构03、驱动机构04和导向机构06分别安装于安装平台05;导向机构06,第一端安装于安装平台05,第二端止抵于“工”字形的轨道02外侧面;在运行过程中,第二端紧贴“工”字形的轨道02外侧面滑动;驱动机构04可通过传动机构03带动安装平台05沿“工”字形的轨道02运动。
31.需要说明的是,本技术实施例提供的是轨道式巡检设备的行走装置,该行走装置安装在安装平台的上侧,该平台的下侧安装有伸缩机构,伸缩机构的末端连接摄像头模块(具体,参见图5所示,图5示出了伸缩机构的部分和摄像头模块)。在实际工作中,行走装置负责带动整机水平方向的移动,伸缩机构负责竖直方向的移动,进而将摄像头移动至需要巡检的表箱,通过摄像头采集图像,完成电气设备的巡检。
32.可选的,上述驱动机构04可以为步进电机,例如,交流电机或直流电机。本实施例采用24v的直流电机。
33.需要说明的是,上述滑动轮组01为偶数个,分别对称安装于该“工”字形的轨道02的内侧的上下底面上。本技术实施例共计安装4组,故如图2、3、4所示,安装两组轮架于安装平台上。而每一组滑动轮组中的背轮和行走轮分别贴合轨道的上下踏面(即,第一轨道面和第二轨道面),从而可以保证整机运行平稳无颠簸。
34.可选的,如图1所示,上述“工”字形的轨道02包括:位于上底面下侧的第一轨道面021、位于下底面上侧的第二轨道面022、以及下底面两侧的第三轨道面023。背轮01a止抵于第一轨道面021,走行轮01b止抵于第二轨道面022,背轮01a的中轴与走行轮01b的中轴通过轮架01c固定在安装平台05上。
35.可选的,本技术实施例中,上述“工”字形的轨道02上下底面的长度可以相同或不同,在实际使用过程中下底面的两侧面(即,第三轨道面023处)可以稍宽,方便与导向轮接触。在实际使用过程中,如图1所示,可以在底面的一个侧面向下固定安装齿条,进而将齿条与“工”字形的轨道02固定连接,而齿条侧面(非齿面)的部分也可以作为第三轨道面与导向轮接触(具体,如图3所示)。
36.可选的,本技术实施例中,上述“工”字形的轨道,是指横截面为“工”字形的轨道,其安装过程中可以为直线轨道或曲线轨道。
37.可以理解的是,由于背轮止抵于“工”字形的轨道的第一轨道面,走行轮止抵于“工”字形的轨道的第二轨道面,导向轮止抵接触“工”字形的轨道的底面两侧的第三轨道面。如此可以保证行走机构沿轨道的平稳运动,并由于导向轮的存在可以保证运动过程中的平稳转向,可以邮箱防止跑偏和歪斜。
38.可选的,如图1所示,上述滑动轮组01、传动机构03、驱动机构04和导向机构06分别安装于安装平台05上。
39.可选的,本技术实施例中,导向机构,第一端安装于安装平台05,第二端止抵于“工”字形的轨道02外侧面。如此可以通过导向机构的作用,使得整个安装平台在“工”字形的轨道02运动过程中,始终紧贴轨道,从而有效避免通过弧形轨道的弯道时,所出现跑偏,歪斜,晃动等问题。
40.本发明实施例提供的行走装置包括:滑动轮组、“工”字形的轨道、传动机构、驱动机构、安装平台和导向机构。该滑动轮组包括:背轮、走行轮和轮架,该滑动轮组为偶数个,分别对称安装于该“工”字形的轨道的内侧的上下底面上;该滑动轮组、该传动机构、该驱动机构和该导向机构分别安装于该安装平台;该导向机构,第一端安装于该安装平台,第二端止抵于该“工”字形的轨道外侧面;在运行过程中,该第二端紧贴该“工”字形的轨道外侧面滑动;该驱动机构可通过该传动机构带动该安装平台沿该“工”字形的轨道运动。通过该方案,一方面,由于本技术采用“工”字形的轨道,且且滑动轮组分别对称安装于“工”字形的轨道的内侧的上下底面上,使得受力更加平衡,滑动轮组的运行更加平稳;另一方面,本技术通过增加导向机构,且设置导向机构的一端抵于该“工”字形的轨道外侧面,从而使得该行走装置在运动过程中,导向机构始终能够紧贴轨道,进而可以有效避免通过弧形轨道的弯道时,所出现跑偏,歪斜,晃动等问题。
41.可选的,结合图1,如图3所示,导向机构06包括:压簧061、导向固定板062、导向转轴063、导向活动板064和导向轮065。导向固定板062固定连接安装平台05;压簧061的一端连接导向固定板062,另一端连接导向活动板064;压簧061给导向轮065提供预紧,使该导向
轮063在运行过程中,始终紧贴“工”字形的轨道02外侧面滑动。
42.可选的,本技术实施例中,导向机构06成对安装使用,如图3所示,安装有两个。
43.可选的,如图3所示,导向轮065通过导向转轴063连接在导向活动板064上,导向轮065可绕导向转轴063按一定角度旋转;
44.在运行过程中,导向轮063能够按照“工”字形的轨道02的弧度调整旋转角度,并通过压簧061提供预紧力,使导向轮063始终紧贴“工”字形的轨道02外侧面滑动。
45.可选的,本技术实施例中,上述导向转轴的旋转角度能够随着“工”字形的轨道的弧度调整。实际使用过程中,可以参照导向转轴的旋转角度大于或等于“工”字形的轨道的最大弧度的圆心角,且导向转轴至导向轮的前端的距离小于等于“工”字形的轨道的最大弧长的1/5。如此可以有效保证导向轮运行的顺滑。
46.可以理解的是,由于该导向机构内置压簧,并通过压簧给导向轮提供一定的压紧力,从而使得该导向轮在运动过程中始终紧贴轨道,进而可以有效避免通过弧形轨道的弯道时,所出现跑偏,歪斜,晃动等问题。
47.可选的,结合图1,如图2所示,行走装置00还包括:限位装置07;该限位装置07包括:安装于“工”字形的轨道02上的限位撞块071和安装于轮架01c上的限位开关072;在运行过程中,当限位撞块071与限位开关072接触时,行走装置00停止运行。
48.可选的,本技术实施例中,上述限位撞块与限位开关接触,是指限位撞块与限位开关的物理接触,或者磁接触。当限位撞块与限位开关均采用磁性物质,或连接电磁传感器时,两者虽未进行直接的物理接触,但由于磁场的作用已完成磁接触,也能够触发行走装置停止运动。
49.可以理解的是,由于行走装置上安装了限位撞快和限位开关,因此,当行走装置运动时触发限位撞块和限位开关接触,可以使得行走装置停止运动,进而达到有效限位。
50.可选的,结合图1,如图2所示,传动机构03包括:相互啮合的齿轮031和齿条032。轮031安装在安装平台05上,齿条032沿“工”字形的轨道02安装;驱动机构04通过带动齿轮031沿齿条032运动,进而带动安装平台05沿“工”字形的轨道02运动。
51.可以理解的是,由于齿轮齿条的传动作用,可以将驱动结构(例如,伺服电机)的动力输出至齿轮,进而通过齿轮运动带动整个行走机构运动。
52.可选的,结合图1,如图4所示,上述行走装置00还包括:控制装置08;该控制装置08包括:相互电连接的编码器081(图1中示出)、驱动器082和控制电路板083;该编码器081安装在驱动机构04上,用于检测该驱动机构04的速度和位置;驱动器082连接驱动机构04,可控制该驱动机构04的转速和转向;控制电路板083,可通过编码器081和驱动器082,控制驱动机构04带动行走装置00沿“工”字形的轨道02运动或停止。
53.可以理解的是,由于编码器可以检测驱动机构的速度和位置,控制电路板可以通过编码器传输的信息,向驱动器发送控制指令,从而通过驱动器控制驱动机构的转速和转向,进而实现对整个行走机构的运动的整体控制。
54.实施例二、
55.本技术实施例提供一种控制方法,应用于行走装置(如,上述实施例一中的行走装置),该行走装置包括:滑动轮组、“工”字形的轨道、传动机构、驱动机构、安装平台和导向机构;该滑动轮组包括:背轮、走行轮和轮架,滑动轮组为偶数个,分别对称安装于“工”字形的
轨道的内侧的上下底面上;滑动轮组、传动机构、驱动机构和导向机构分别安装于安装平台;导向机构,第一端安装于安装平台,第二端止抵于“工”字形的轨道外侧面;在运行过程中,第二端紧贴“工”字形的轨道外侧面滑动;该控制方法包括下述步骤101。
56.步骤101、驱动机构可控制传动机构带动安装平台沿“工”字形的轨道运动。
57.需要说明的是,驱动机构由于受到控制装置的控制,而控制装置又包括:编码器、驱动器和控制电路板。编码器可以检测驱动机构的速度和位置,控制电路板可以通过编码器传输的信息,向驱动器发送控制指令,从而通过驱动器控制驱动机构的转速和转向,进而实现对整个行走机构的运动的整体控制。具体控制过程可以参见实施例一中的描述,此处不再赘述。
58.可选的,上述行走装置还包括:限位装置,限位装置包括:安装于“工”字形的轨道上的限位撞块和安装于轮架上的限位开关,该控制方法还包括下述步骤102。
59.步骤102、在运行过程中,当限位撞块与限位开关接触时,驱动机构可控制行走装置停止运行。
60.需要说明的是,具体控制过程可以参见实施例一中的描述,此处不再赘述。
61.可选的,上述行走装置还包括:控制装置,该控制装置包括:相互电连接的编码器、驱动器和控制电路板。步骤101的控制方法具体可以包括下述步骤101a和步骤101b。
62.步骤101a、控制电路板接收编码器反馈的第一信号。
63.其中,上述第一信号用于表征驱动机构的速度和位置。
64.可选的,该第一信号中包含驱动机构的速度参数和位置参数。该速度参数用于表征该驱动机构的转速。该位置参数用于表征行走机构在“工”字形的轨道上的位置,该位置确定可以结合位置确定可以结合传感器(例如,安装在“工”字形的轨道上的位置传感器,或者安装在行走机构上的位置传感器)进行确定。
65.步骤101b、控制电路根据第一信号向驱动器发送控制驱动机构的转速和转向的第二信号。
66.其中,上述第二信号包括有控制驱动机构转速和转向的指令。
67.可选的,如图4所示,为了方便控制,该行走装置还可以包括:交换机091、开关电源092、通信载波模块093和变压器094。
68.可选的,如图5所示,行走装置的下侧可以通过安装平台安装:伸缩装置095、避障传感器096和摄像头单元097。
69.示例性的,如图6所示,外接ac 220v电源经过开关电源092给控制电路板083、驱动器082、步进电机(即,驱动机构04)输入dc 24v,编码器081检测电机的速度和位置,反馈给控制电路板083,控制电路板083根据反馈结果重新发送信号(即,第二信号),控制驱动机构的转速和转向。此外,避障传感器096遇到障碍物将信号传给控制电路板083,控制电路板083输出反馈信号,进而调整伸缩装置095的伸缩,以完成避障。并且,外接ac 220v电源可以经过变压器23给摄像机(即,摄像头单元097)输入ac 24v,再通过交换机(091)和通信载波模块(093)输出视频或图像信号。
70.可以理解的是,本技术实施例提供一种控制方法,一方面,控制电路板可以根据编码器检测的电机的速度和位置信息(即,第一信息),输出第二信息以控制驱动机构的转速和转向;另一方面,控制电路板可以根据避障传感器的信号输出反馈信号,进而调整伸缩装
置的伸缩,以完成避障;再一方面,摄像头单元采集的信号可以通过交换机和通信载波模块输出。
71.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、物品或者装置中还存在另外的相同要素。
72.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1