一种蛇形管道检测机器人
本发明涉及了一种检测机器人,具体涉及一种蛇形管道检测机器人。
背景技术:
1、管道在长期使用过程中内壁可能会存在缺陷,管道检测机器人定期对管道进行检测能够保证管道可靠运行。目前管道检测机器人在检测过程中对于不同管径连接处的应变能力、满足多尺度的管径能力、变换方向的能力、大倾斜角度的爬行能力很难同时满足,无法顺利完成检测任务。
技术实现思路
1、为了解决背景技术中存在的问题,本发明所提供一种能够满足多尺度的管径变化、模块化设计安装方便、转弯能力强且能够适应大角度倾斜管道内部作业的蛇形管道检测机器人。
2、本发明采用的技术方案是:
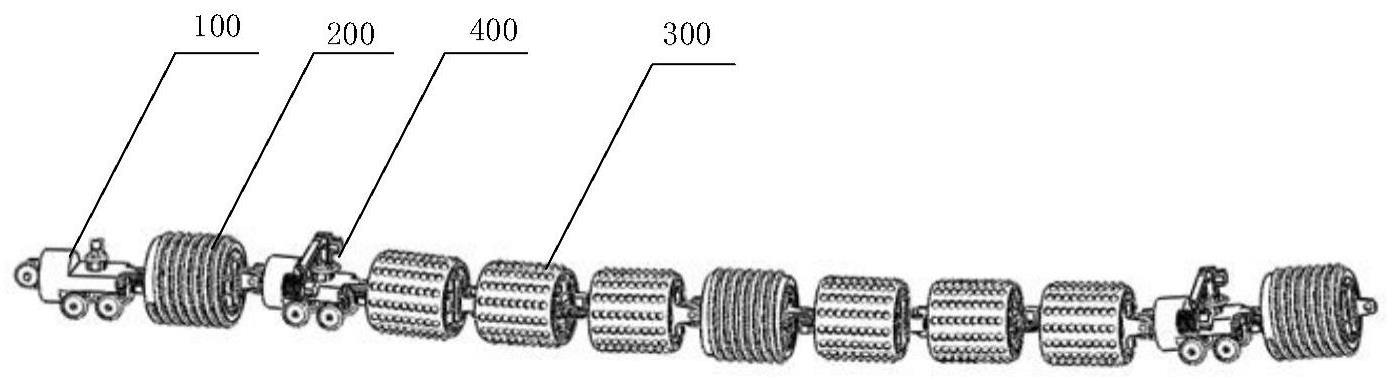
3、本发明蛇形管道检测机器人包括检测模块、若干螺旋推进模块、两个清洁模块和若干盘旋推进模块,检测模块作为检测机器人的头部,检测模块依次连接一个螺旋推进模块以及一个清洁模块,若干盘旋推进模块依次连接构成盘旋推进模组,若干盘旋推进模组通过若干螺旋推进模块相连接构成总推进模组,每两个盘旋推进模组之间连接一个螺旋推进模块,两个清洁模块之间连接总推进模组,即两个清洁模块分别连接总推进模组中的第一个盘旋推进模块和最后一个盘旋推进模块,另一个清洁模块再和一个作为检测机器人的尾部的螺旋推进模块连接。
4、检测模块用于度实时获取管道内壁的工况;螺旋推进模块用于提供全地形爬行时的前进动力;清洁模块用于清除管道内壁的污渍杂物;盘旋推进模块与其他模块通过齿轮齿条铰接盘旋成直径可变的螺旋形状,适应各种转弯、变径和管径不均匀变化的场景,盘旋驱动模块转动,驱动整体前进,从而实现检修模块多角度检测管道内壁的目的。
5、所述的检测模块包括转向齿轮ⅰ、检测模块主体、摄像头、摄像头转台、摄像头转台电机、检测模块齿条和四个检测模块车轮,四个检测模块车轮分别安装在检测模块主体底部下方的四个角处,检测模块主体前部设有竖直布置的第一安装板,第一安装板上安装有转向齿轮ⅰ,转向齿轮ⅰ的中心轴垂直活动连接第一安装板;检测模块主体的后部端面水平安装有检测模块齿条,检测模块齿条的齿面朝向检测模块的后方;摄像头转台电机的机身安装在检测模块主体的顶面,摄像头转台电机的输出轴竖直向上同步连接水平布置的摄像头转台的底面,摄像头转台的顶面上安装摄像头,摄像头朝向水平方向;检测模块主体的后部铰接螺旋推进模块的前部,检测模块齿条和螺旋推进模块的前部啮合。
6、当检测模块前方连接有推进模块清洁模块或盘旋推进模块时,检测模块的转向齿轮ⅰ和前方连接的一个模块的齿条之间相互垂直啮合,检测模块的检测模块主体铰接前方连接的一个模块的主体机身的后部。摄像头达到多角度范围全方位的实时检测管道内壁的缺陷。
7、所述的螺旋推进模块包括螺旋橡胶套、主动齿轮ⅰ、螺旋驱动电机、内齿轮筒体ⅰ、螺旋推进模块主体、螺旋推进模块齿条、从动齿轮ⅰ和转向齿轮ⅲ,螺旋橡胶套同轴套装在内齿轮筒体ⅰ的外周面,螺旋橡胶套的外周面为螺纹状,内齿轮筒体ⅰ的内周面为齿状;螺旋推进模块主体安装在内齿轮筒体ⅰ内,螺旋推进模块主体前部设有竖直布置的第二安装板,第二安装板上安装有转向齿轮ⅲ,转向齿轮ⅲ的中心轴垂直活动连接第二安装板;螺旋推进模块主体后部的相对两侧分别安装有主动齿轮ⅰ和从动齿轮ⅰ,螺旋推进模块主体后部的其中一侧设有竖直布置的两个第一齿轮安装板,两个第一齿轮安装板垂直于内齿轮筒体ⅰ的中心轴线,从动齿轮ⅰ安装在两个第一齿轮安装板之间,从动齿轮ⅰ的中心轴垂直活动连接两个第一齿轮安装板,从动齿轮ⅰ和内齿轮筒体ⅰ的内周面啮合;螺旋驱动电机的机身安装在螺旋推进模块主体后部的另外一侧,螺旋驱动电机的输出轴平行于内齿轮筒体ⅰ的中心轴线并同步连接从动齿轮ⅰ的中心,从动齿轮ⅰ和内齿轮筒体ⅰ的内周面啮合;螺旋推进模块主体的后部端面水平安装有螺旋推进模块齿条,螺旋推进模块齿条的齿面朝向螺旋推进模块的后方。
8、所述的位于检测机器人前部的一个螺旋推进模块的螺旋推进模块主体前部铰接检测模块的检测模块主体的后部,螺旋推进模块主体后部铰接位于自身后方的清洁模块的前部,并且螺旋推进模块的转向齿轮ⅲ垂直啮合检测模块的检测模块齿条;位于检测机器人后部的一个螺旋推进模块的螺旋推进模块主体前部铰接位于自身前方的一个清洁模块的后部,并且螺旋推进模块的转向齿轮ⅲ啮合位于自身前方的一个清洁模块的后部;位于检测机器人中部的每个螺旋推进模块的螺旋推进模块主体前部铰接位于自身前方的一个盘旋推进模块的后部,螺旋推进模块主体后部铰接位于自身后方的一个盘旋推进模块的前部,并且螺旋推进模块的转向齿轮ⅲ啮合位于自身前方的一个盘旋推进模块的后部,螺旋推进模块的螺旋推进模块齿条啮合位于自身后方的一个盘旋推进模块的前部;铰接处实现水平自由度的转动。
9、所述的清洁模块包括转向齿轮ⅱ、转向电机、清洁模块主体、清洁模块齿条、四个清洁模块车轮和清洁装置,四个清洁模块车轮分别安装在清洁模块主体底部下方的四个角处,清洁模块主体前部设有竖直布置的第三安装板,第三安装板的一侧面上安装有转向齿轮ⅱ,转向齿轮ⅱ的中心轴垂直活动连接第三安装板,转向电机的机身安装在第三安装板的另一侧面上,转向电机的输出轴垂直穿设过第三安装板并同步连接转向齿轮ⅱ的中心轴;清洁模块主体的后部端面水平安装有清洁模块齿条,清洁模块齿条的齿面朝向清洁模块的后方;清洁装置安装在清洁模块主体的顶面。
10、所述的位于检测机器人前部的一个清洁模块的清洁模块主体的前部铰接位于自身前方的一个螺旋推进模块的螺旋推进模块主体后部,清洁模块主体的后部铰接位于自身后方的一个盘旋推进模块的前部,并且清洁模块的转向齿轮ⅱ垂直啮合位于自身前方的一个螺旋推进模块的螺旋推进模块齿条,清洁模块的清洁模块齿条和位于自身后方的一个盘旋推进模块的前部啮合;位于检测机器人后部的一个清洁模块的清洁模块主体的前部铰接位于自身后方的一个盘旋推进模块的后部,清洁模块主体的后部铰接位于自身后方的一个螺旋推进模块的螺旋推进模块主体的前部,并且清洁模块的转向齿轮ⅱ和盘旋推进模块的后部啮合,清洁模块的清洁模块齿条和螺旋推进模块的主动齿轮ⅰ垂直啮合。
11、所述的清洁装置包括清洁模块转台、清洁臂电机、清洁模块转台电机、清洁臂、清洁模块清洁滚电机和清洁滚,清洁模块转台电机的机身安装在清洁模块主体的顶面,清洁模块转台电机的输出轴竖直向上同步连接清洁模块转台的底面,清洁模块转台的顶面设有安装架,清洁臂电机的机身安装在安装架上,清洁臂电机的输出轴水平并平行于清洁模块的前进方向,清洁臂电机的输出轴同步连接清洁臂的根端,清洁臂的末端的相对两侧分别安装有清洁模块清洁滚电机和清洁滚,清洁模块清洁滚电机的机身安装在清洁臂的末端的一侧,清洁模块清洁滚电机的输出轴平行于清洁臂电机的输出轴并同步连接清洁滚的中心轴,清洁滚的外周面设有若干橡胶凸起结构,各个橡胶凸起结构紧贴待检测的管道内壁。
12、所述的盘旋推进模块包括橡胶凸起套、内齿轮筒体ⅱ、从动齿轮ⅱ、盘旋推进模块主体、盘旋推进齿条、盘旋驱动电机、主动齿轮ⅱ和转向齿轮ⅳ,橡胶凸起套同轴套装在内齿轮筒体ⅱ的外周面,橡胶凸起套的外周面为若干列均匀间隔分布的凸起结构,各列凸起结构的列长方向平行于内齿轮筒体ⅱ的中心轴线,内齿轮筒体ⅱ的内周面为齿状;盘旋推进模块主体安装在内齿轮筒体ⅱ内,盘旋推进模块主体前部设有竖直布置的第四安装板,第四安装板上安装有转向齿轮ⅳ,转向齿轮ⅳ的中心轴垂直活动连接第四安装板;盘旋推进模块主体后部的相对两侧分别安装有从动齿轮ⅱ和主动齿轮ⅱ,检测模块齿条后部的其中一侧设有竖直布置的两个第二齿轮安装板,两个第二齿轮安装板垂直于内齿轮筒体ⅱ的中心轴线,从动齿轮ⅱ安装在两个第二齿轮安装板之间,从动齿轮ⅱ的中心轴垂直活动连接两个第二齿轮安装板,从动齿轮ⅱ和内齿轮筒体ⅱ的内周面啮合;盘旋驱动电机的机身安装在盘旋推进模块主体后部的另外一侧,盘旋驱动电机的输出轴平行于内齿轮筒体ⅱ的中心轴线并同步连接从动齿轮ⅱ的中心,从动齿轮ⅱ和内齿轮筒体ⅱ的内周面啮合;盘旋推进模块主体的后部端面水平安装有盘旋推进齿条,盘旋推进齿条的齿面朝向盘旋推进模块的后方。
13、所述的位于检测机器人前部的一个盘旋推进模组的前部的一个盘旋推进模块的盘旋推进模块主体的前部铰接位于自身前方的一个清洁模块的清洁模块主体的后部,盘旋推进模块主体的后部铰接位于自身后方的一个盘旋推进模块的盘旋推进模块主体的前部,并且盘旋推进模块的转向齿轮ⅳ垂直啮合位于自身前方的一个清洁模块的清洁模块齿条,盘旋推进模块的盘旋推进齿条垂直啮合盘旋推进模块的转向齿轮ⅳ;位于每个盘旋推进模组的中部的一个盘旋推进模块的盘旋推进模块主体的前部铰接位于自身前方的一个盘旋推进模块的盘旋推进模块主体的后部,盘旋推进模块主体的后部铰接位于自身后方的一个盘旋推进模块的盘旋推进模块主体的前部,并且盘旋推进模块的转向齿轮ⅳ垂直啮合位于自身前方的一个盘旋推进模块的盘旋推进齿条,盘旋推进模块的盘旋推进齿条垂直啮合位于自身后方的一个盘旋推进模块的转向齿轮ⅳ;位于检测机器人前部和中部的每个盘旋推进模组后部的一个盘旋推进模块的盘旋推进模块主体的前部铰接位于自身前方的一个盘旋推进模块的盘旋推进模块主体的后部,盘旋推进模块主体的后部铰接位于自身后方的一个螺旋推进模块的螺旋推进模块主体的前部,并且盘旋推进模块的转向齿轮ⅳ垂直啮合位于自身前方的一个盘旋推进模块的盘旋推进齿条,盘旋推进模块的盘旋推进齿条垂直啮合位于自身后方的一个螺旋推进模块的转向齿轮ⅲ;位于检测机器人后部的一个盘旋推进模组的后部的一个盘旋推进模块的盘旋推进模块主体的前部铰接位于自身前方的一个盘旋推进模块的盘旋推进模块主体的后部,盘旋推进模块主体的后部铰接位于自身后方的一个清洁模块的清洁模块主体的前部,并且盘旋推进模块的转向齿轮ⅳ垂直啮合位于自身前方的一个盘旋推进模块的盘旋推进齿条,盘旋推进模块的盘旋推进齿条垂直啮合位于自身后方的一个清洁模块的转向齿轮ⅱ。
14、本发明的有益效果是:
15、1)本发明装置能能够根据不同的管径变化需求,通过增加或者减少盘旋推进模块的数量以满足不同管道直径的作业需求,实现个性化作业需要,且模块化设计安装方便。
16、2)本发明通过设置的单模块的齿轮齿条垂直交叉连接能够实现不同转弯角度下的工况,实现高效自适应转弯。
17、3)本发明通过多个模块齿轮齿条铰接能够呈螺旋上升线盘旋在管道内壁,实现高效贴合,且能够适应大角度倾斜管道的作业环境。
18、4)本发明通过设置的螺旋推进模块和盘旋推进模块,能够实行全地形的快速行走和检测作业中的迅速盘旋驱动,多套驱动模式适应检测作业和全地形的螺旋推进。
- 还没有人留言评论。精彩留言会获得点赞!