一种多轴伺服电机驱动装置的制作方法
1.本实用新型涉及伺服电机驱动技术领域,具体为一种多轴伺服电机驱动装置。
背景技术:
2.伺服电动机,用作自动控制装置中执行元件的微特电机,又称执行电动机,其功能是将电信号转换成转轴的角位移或角速度,在讯号来到之前,转子静止不动,讯号来到之后,转子立即转动,当讯号消失,转子能即时自行停转,由于它的伺服性能,因此而得名,伺服电机常用在驱动装置中,驱动装置是带动物体移动的一种装置,驱动装置包括了动力源和移动机构,动力源驱动移动机构工作,来带动物体移动,部分驱动装置的动力源为伺服电机。
3.多轴伺服电机驱动装置在使用的过程中,不便于对移动底座的位置信息进行检测,容易影响伺服电机驱动装置对移动底座进行调节,降低了驱动装置的驱动精度。
技术实现要素:
4.本实用新型的目的在于提供一种多轴伺服电机驱动装置,具备调节精度高的优点,解决了多轴伺服电机驱动装置在使用的过程中,不便于对移动底座的位置信息进行检测,容易影响伺服电机驱动装置对移动底座进行调节,降低了驱动装置的驱动精度的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种多轴伺服电机驱动装置,包括底座,所述底座顶部的右侧和后侧分别固定安装有第一驱动机构和第二驱动机构,所述第一驱动机构的左侧通过螺栓固定连接有竖向移动杆,所述第二驱动机构的正面通过螺栓固定连接有横向移动杆,所述竖向移动杆和横向移动杆的表面活动连接有移动底座,所述第一驱动机构包括第一壳体,所述第一壳体的正面通过螺栓固定连接有第一伺服电机,所述第一伺服电机的输出轴固定连接有第一丝杆,所述第一丝杆的表面螺纹套设有第一螺母座,所述第一壳体的左侧固定安装有第一安装座,所述第一安装座的左侧通过螺栓固定安装有第一测距传感器,所述第二驱动机构包括第二壳体,所述第二壳体的右侧通过螺栓固定连接有第二伺服电机,所述第二伺服电机的输出轴固定连接有第二丝杆,所述第二丝杆的表面螺纹套设有第二螺母座,所述第二壳体的正面固定连接有第二安装座,所述第二安装座的内壁通过螺栓固定连接有第二测距传感器。
6.为了便于对竖向移动杆进行限位,作为本实用新型的一种多轴伺服电机驱动装置优选的,所述竖向移动杆的左端滑动连接有横向滑框,所述横向滑框的底部与底座的顶部通过螺栓固定连接,所述底座的底部焊接有固定架。
7.为了便于横向移动杆进行限位,作为本实用新型的一种多轴伺服电机驱动装置优选的,所述横向移动杆的正面滑动连接有竖向滑框,所述竖向滑框的底部与底座的顶部固定连接。
8.为了便于对第一驱动机构和第二驱动机构进行防护,作为本实用新型的一种多轴伺服电机驱动装置优选的,所述底座顶部的前侧和左侧焊接有防护座,所述第一驱动机构
和第二驱动机构位于防护座的底部,所述底座的正面通过螺栓固定连接有控制器,所述控制器的正面分别固定安装有显示器和控制按键。
9.为了便于对移动底座进行限位并带动其移动,作为本实用新型的一种多轴伺服电机驱动装置优选的,所述移动底座的底部与底座的顶部滑动连接,所述移动底座上分别开设有与竖向移动杆和横向移动杆配合使用的活动孔。
10.为了便于使第一螺母座和第二螺母座稳定移动,作为本实用新型的一种多轴伺服电机驱动装置优选的,所述第一螺母座的外表面与第一壳体的内壁滑动连接,所述第一丝杆的后端与第一壳体内壁的后侧通过轴承转动连接,所述第二螺母座的外表面与第二壳体的内壁滑动连接,所述第二丝杆的左端与第二壳体内腔的左侧通过轴承转动连接。
11.与现有技术相比,本实用新型的有益效果如下:
12.1、本实用新型通过底座、固定架、横向滑框、竖向移动杆、移动底座、第二驱动机构、横向移动杆、防护座、第一驱动机构、控制器和竖向滑框的配合使用,解决了多轴伺服电机驱动装置在使用的过程中,不便于对移动底座的位置信息进行检测,容易影响伺服电机驱动装置对移动底座进行调节,降低了驱动装置的驱动精度的问题。
13.2、本实用新型通过设置固定架,能够便于对底座进行安装固定,通过设置第二驱动机构,能够便于通过横向移动杆带动移动底座横向移动,通过设置第一驱动机构,能够便于通过竖向移动杆带动移动底座竖向移动,通过设置横向滑框,能够便于对移动的竖向移动杆进行限位使其稳定移动,通过设置竖向滑框,能够便于对移动的横向移动杆进行限位使其稳定移动,通过设置移动底座,能够便于带动被驱动的物体移动。
附图说明
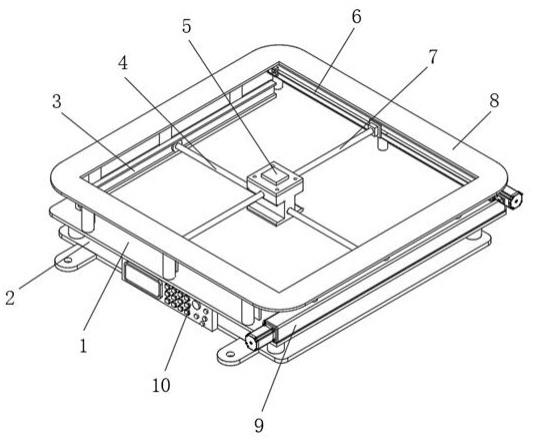
14.图1为本实用新型轴测图;
15.图2为本实用新型左视图;
16.图3为本实用新型第一驱动机构爆炸图;
17.图4为本实用新型第二驱动机构爆炸图。
18.图中:1、底座;2、固定架;3、横向滑框;4、竖向移动杆;5、移动底座;6、第二驱动机构;7、横向移动杆;8、防护座;9、第一驱动机构;10、控制器;11、竖向滑框;12、第一伺服电机;13、第一丝杆;14、第一螺母座;15、第一壳体;16、第一测距传感器;17、第一安装座;18、第二伺服电机;19、第二壳体;20、第二螺母座;21、第二丝杆;22、第二安装座;23、第二测距传感器。
具体实施方式
19.请参阅图1-图4,一种多轴伺服电机驱动装置,包括底座1,底座1顶部的右侧和后侧分别固定安装有第一驱动机构9和第二驱动机构6,第一驱动机构9的左侧通过螺栓固定连接有竖向移动杆4,第二驱动机构6的正面通过螺栓固定连接有横向移动杆7,竖向移动杆4和横向移动杆7的表面活动连接有移动底座5,第一驱动机构9包括第一壳体15,第一壳体15的正面通过螺栓固定连接有第一伺服电机12,第一伺服电机12的输出轴固定连接有第一丝杆13,第一丝杆13的表面螺纹套设有第一螺母座14,第一壳体15的左侧固定安装有第一安装座17,第一安装座17的左侧通过螺栓固定安装有第一测距传感器16,第二驱动机构6包
括第二壳体19,第二壳体19的右侧通过螺栓固定连接有第二伺服电机18,第二伺服电机18的输出轴固定连接有第二丝杆21,第二丝杆21的表面螺纹套设有第二螺母座20,第二壳体19的正面固定连接有第二安装座22,第二安装座22的内壁通过螺栓固定连接有第二测距传感器23。
20.本实施例中:事先把需要驱动的物体安装在移动底座5的顶部,当需要带动物体竖向移动时,通过控制器10启动第一驱动机构9,第一伺服电机12的输出轴带动第一丝杆13旋转,第一丝杆13带动第一螺母座14和竖向移动杆4移动,竖向移动杆4带动移动底座5在底座1的顶部和横向移动杆7的表面滑动,来对物体进行竖向调节,第一测距传感器16对第一螺母座14的位置进行检测,并把检测信号传输至控制器10内,来对移动底座5的调节位置进行定位,当需要带动物体横向移动时,通过控制器10启动第二驱动机构6,第二伺服电机18的输出轴带动第二丝杆21旋转,第二丝杆21带动第二螺母座20和横向移动杆7移动,横向移动杆7带动移动底座5在底座1的顶部和竖向移动杆4的表面滑动,来对物体进行横向调节,第二测距传感器23对第二螺母座20的位置进行检测,并把检测信号传输至控制器10内,来对移动底座5的调节位置进行定位。
21.作为本实用新型的一种技术优化方案,竖向移动杆4的左端滑动连接有横向滑框3,横向滑框3的底部与底座1的顶部通过螺栓固定连接,底座1的底部焊接有固定架2。
22.本实施例中:第一驱动机构9带动竖向移动杆4移动的过程中,竖向移动杆4的左端在横向滑框3的内壁滑动,横向滑框3对竖向移动杆4进行限位,防止竖向移动杆4上下晃动,影响移动底座5移动的稳定性。
23.作为本实用新型的一种技术优化方案,横向移动杆7的正面滑动连接有竖向滑框11,竖向滑框11的底部与底座1的顶部固定连接。
24.本实施例中:第二驱动机构6带动横向移动杆7移动的过程中,横向移动杆7的正面在竖向滑框11的内壁滑动,竖向滑框11对横向移动杆7进行限位,防止横向移动杆7上下晃动,影响移动底座5移动的稳定性。
25.作为本实用新型的一种技术优化方案,底座1顶部的前侧和左侧焊接有防护座8,第一驱动机构9和第二驱动机构6位于防护座8的底部,底座1的正面通过螺栓固定连接有控制器10,控制器10的正面分别固定安装有显示器和控制按键。
26.本实施例中:通过设置防护座8,能够便于对第二驱动机构6和第一驱动机构9的顶部进行防护,避免第二驱动机构6和第一驱动机构9受到外界的碰撞损坏,通过设置控制器10,能够便于对第二驱动机构6和第一驱动机构9进行控制,控制器10把接收到的检测信号传输至显示器内,显示器对位置信息进行显示。
27.作为本实用新型的一种技术优化方案,移动底座5的底部与底座1的顶部滑动连接,移动底座5上分别开设有与竖向移动杆4和横向移动杆7配合使用的活动孔。
28.本实施例中:移动底座5的底部与底座1的顶部滑动连接,能够便于防止移动底座5在移动的过程中转动,移动底座5上开设有与竖向移动杆4和横向移动杆7配合使用的活动孔,能够便于移动底座5在竖向移动杆4和横向移动杆7的表面滑动。
29.作为本实用新型的一种技术优化方案,第一螺母座14的外表面与第一壳体15的内壁滑动连接,第一丝杆13的后端与第一壳体15内壁的后侧通过轴承转动连接,第二螺母座20的外表面与第二壳体19的内壁滑动连接,第二丝杆21的左端与第二壳体19内腔的左侧通
过轴承转动连接。
30.本实施例中:第一螺母座14的外表面与第一壳体15的内壁滑动连接,能够便于对第一螺母座14进行限位,防止其移动的过程中自转,第一丝杆13的后端与第一壳体15内壁的后侧通过轴承转动连接,能够便于对第一丝杆13的后端进行稳固支撑,第二螺母座20的外表面与第二壳体19的内壁滑动连接,能够便于对第二螺母座20进行限位,防止其移动的过程中自转,第二丝杆21的左端与第二壳体19内腔的左侧通过轴承转动连接,能够便于对第二丝杆21的左端进行稳固支撑。
31.使用时,事先把需要驱动的物体安装在移动底座5的顶部,当需要带动物体竖向移动时,通过控制器10启动第一驱动机构9,第一伺服电机12的输出轴带动第一丝杆13旋转,第一丝杆13带动第一螺母座14和竖向移动杆4移动,竖向移动杆4带动移动底座5在底座1的顶部和横向移动杆7的表面滑动,来对物体进行竖向调节,第一测距传感器16对第一螺母座14的位置进行检测,并把检测信号传输至控制器10内,来对移动底座5的调节位置进行定位,当需要带动物体横向移动时,通过控制器10启动第二驱动机构6,第二伺服电机18的输出轴带动第二丝杆21旋转,第二丝杆21带动第二螺母座20和横向移动杆7移动,横向移动杆7带动移动底座5在底座1的顶部和竖向移动杆4的表面滑动,来对物体进行横向调节,第二测距传感器23对第二螺母座20的位置进行检测,并把检测信号传输至控制器10内,来对移动底座5的调节位置进行定位。
32.综上所述:该多轴伺服电机驱动装置,通过底座1、固定架2、横向滑框3、竖向移动杆4、移动底座5、第二驱动机构6、横向移动杆7、防护座8、第一驱动机构9、控制器10和竖向滑框11的配合使用,解决了多轴伺服电机驱动装置在使用的过程中,不便于对移动底座的位置信息进行检测,容易影响伺服电机驱动装置对移动底座进行调节,降低了驱动装置的驱动精度的问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1