海洋平台用升降齿轮箱的制作方法
1.本实用新型涉及船用设备技术领域,尤其涉及海洋平台用升降齿轮箱。
背景技术:
2.自升式海洋平台适合近海域的石油、天然气的勘探与开采,升降系统作为海洋石油钻井平台的关键组成装置,属于大型海洋工程配套装备,在平台的设计制造中受到高度重视。其用于在平台钻井作业前,降下平台的桩腿,并将平台提升至海面上某一高度后压载,使平台的桩腿在海底牢固定位;平台完成钻井作业后,拔取桩腿,降下平台至海面,并在平台移位到另一作业地点的过程中,能在较浅的吃水位置随平台漂移;在许可的风暴载荷下,平台有足够的安全性。
3.现有技术中的一种海洋平台用升降齿轮箱,其主要包括驱动件、齿轮系、第一行星轮系、第二行星轮系、输出组件、安装架和扭力臂等,其中,驱动件与齿轮系传动连接,齿轮系的输出轴将扭转力传递给第一行星轮系,第一行星轮系将扭转力再传递给第二行星轮系,第二行星轮系再将扭力传递给输出组件,其中,扭力臂设置在第二行星轮系和输出组件之间,并用于连接第二行星轮系的内齿圈和输出组件,安装架用于支撑该海洋平台用升降齿轮箱,安装架与输出组件的端部和扭力臂均通过连接件连接。这种海洋平台用升降齿轮箱,当驱动机构带动第一行星轮系、第二行星轮系和输出组件运行时,由于扭力臂设置在第二行星轮系和输出组件之间,扭力臂和输出组件沿高度方向的间距较小,使得扭力臂与第二行星轮系的内齿圈之间的扭矩力较大,这就需要沿第二行星轮系的内齿圈设置一圈连接件连接第二行星轮系的内齿圈和扭力臂,导致连接件的数量较多,且导致扭力臂的规格大,其次,由于扭力臂和输出组件沿高度方向的间距较小,当驱动机构带动第一行星轮系、第二行星轮系和输出组件运行时,传递至扭力臂和连接件上的扭矩力易造成安装架发生扭转变形。
技术实现要素:
4.本实用新型的目的在于提供海洋平台用升降齿轮箱,以解决现有技术中的连接第二行星轮系的内齿圈和扭力臂的数量较多,扭力臂的规格大,且安装架易发生扭转变形的问题。
5.为达此目的,本实用新型采用以下技术方案:
6.海洋平台用升降齿轮箱,其包括安装架,以及设置于所述安装架的升降齿轮箱本体,所述升降齿轮箱本体包括:
7.爬升齿轮组件,所述爬升齿轮组件包括连接架和转动设置于所述连接架的爬升齿轮,所述安装架与所述连接架连接;
8.第一ngw行星轮结构,所述第一ngw行星轮结构包括第一行星架、第一中心轴和第一内齿圈,所述第一行星架转动连接于所述第一中心轴,且所述第一行星架与所述爬升齿轮固定连接;
9.第二ngw行星轮结构,所述第二ngw行星轮结构包括第二行星架、第二中心轴和第二内齿圈,所述第二行星架转动连接于所述第二中心轴,且所述第一中心轴与所述第二行星架固定连接;
10.扭力臂,所述扭力臂用于连接所述第一内齿圈和所述第二内齿圈,且所述扭力臂与所述安装架连接;
11.驱动机构,所述驱动机构能带动所述第二中心轴转动;
12.所述爬升齿轮组件、所述第一ngw行星轮结构、所述扭力臂、所述第二ngw行星轮结构和所述驱动机构沿所述安装架的高度方向自上而下依次设置。
13.作为优选,所述安装架间隔设有两个限位槽,所述限位槽沿所述安装架的高度方向自下而上延伸,所述扭力臂设有两个第一连接部,两个所述第一连接部与两个所述限位槽一一对应设置,所述第一连接部能插接于所述限位槽。
14.作为优选,所述海洋平台用升降齿轮箱还包括调节组件,所述调节组件用于限定所述第一连接部和所述限位槽的侧壁之间的相对位置。
15.作为优选,所述调节组件包括调节板,以及可拆卸连接于所述安装架的连接板,所述调节板插接于所述限位槽的侧壁与所述第一连接部之间的间隙,且所述调节板沿所述安装架的高度方向的两端分别抵接于所述限位槽的底壁和所述连接板。
16.作为优选,所述扭力臂还包括相连接的第二连接部和第三连接部,所述第二连接部与所述第一内齿圈可拆卸连接,所述第三连接部与所述第二内齿圈可拆卸连接,两个所述第一连接部均匀且间隔地连接于所述第二连接部的外周面。
17.作为优选,所述安装架沿高度方向间隔设有第一安装孔、第二安装孔和第三安装孔,所述连接架包括第一连接架和第二连接架,所述第一连接架和所述第二连接架均与所述爬升齿轮转动连接且分别位于所述爬升齿轮沿轴向的两端,所述第一连接架插接于所述第一安装孔且与所述安装架可拆卸连接,所述第二连接架插接于所述第二安装孔且与所述安装架可拆卸连接,所述第一内齿圈插接于所述第三安装孔。
18.作为优选,所述第一ngw行星轮结构还包括固定设置于所述第一中心轴的第一太阳轮、多个沿周向间隔设置于所述第一行星架的第一行星轮,所述第一行星轮与所述第一内齿圈和所述第一太阳轮均啮合。
19.作为优选,所述第二ngw行星轮结构还包括固定设置于所述第二中心轴的第二太阳轮、多个沿周向间隔设置于所述第二行星架的第二行星轮,所述第二行星轮与所述第二内齿圈和所述第二太阳轮均啮合。
20.作为优选,所述驱动机构包括驱动电机和齿轮传动机构,所述驱动电机的输出轴与所述齿轮传动机构的输入轴固定连接,所述齿轮传动机构的输出轴与所述第二中心轴固定连接。
21.作为优选,所述升降齿轮箱本体的数量为多个,多个所述升降齿轮箱本体阵列分布。
22.本实用新型的有益效果:
23.本实用新型的目的在于提供了海洋平台用升降齿轮箱,该海洋平台用升降齿轮箱包括安装架,以及设置于安装架的升降齿轮箱本体,升降齿轮箱本体包括爬升齿轮组件、第一ngw行星轮结构、第二ngw行星轮结构、扭力臂和驱动机构,该海洋平台用升降齿轮箱,驱
动组件带动第二中心轴自转,使得第二ngw行星轮结构运行并带动第二行星架绕第二中心轴转动,第二行星架与第一中心轴固定连接,从而带动第一中心轴自转,使得第一ngw行星轮结构运行并带动第一行星架绕第一中心轴转动,第一行星架与爬升齿轮组件的爬升齿轮固定连接,从而带动爬升齿轮自转并输出动力。通过设置爬升齿轮组件、第一ngw行星轮结构、扭力臂、第二ngw行星轮结构和驱动机构沿安装架的高度方向自上而下依次设置,扭力臂用于连接第一内齿圈和第二内齿圈,且扭力臂与安装架连接,安装架还与连接架连接,使得相对于现有技术而言沿安装架的高度方向升降齿轮箱本体与安装架的两个连接位置之间的间距的跨度大,从而使得传递至扭力臂与安装架的连接处的扭矩力变小,从而对扭力臂和安装架之间的连接强度的要求较小,从而有效减小了安装架发生扭转变形的风险,提高该海洋平台用升降齿轮箱的可靠性,且能有效减少用于连接扭力臂和安装架的连接件的数量,减小扭力臂的体积,节省了成本。
附图说明
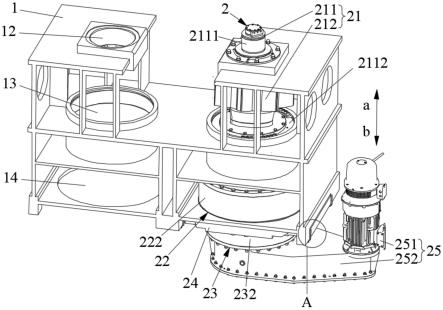
24.图1是本实用新型的具体实施例提供的海洋平台用升降齿轮箱的结构示意图;
25.图2是本实用新型的具体实施例提供的海洋平台用升降齿轮箱的部分结构示意图一;
26.图3是本实用新型的具体实施例提供的海洋平台用升降齿轮箱的部分结构示意图二;
27.图4是图1在a处的局部视图;
28.图5是本实用新型的具体实施例提供的海洋平台用升降齿轮箱的扭力臂的结构示意图。
29.图中:
30.1、安装架;11、限位槽;12、第一安装孔;13、第二安装孔;14、第三安装孔;
31.2、升降齿轮箱本体;21、爬升齿轮组件;211、连接架;2111、第一连接架;2112、第二连接架;212、爬升齿轮;22、第一ngw行星轮结构;221、第一行星架;222、第一内齿圈;223、第一行星轮;224、第一太阳轮;23、第二ngw行星轮结构;231、第二行星架;232、第二内齿圈;233、第二行星轮;234、第二太阳轮;24、扭力臂;241、第一连接部;242、第二连接部;243、第三连接部;25、驱动机构;251、驱动电机;252、齿轮传动机构;
32.3、调节组件;31、调节板;32、连接板。
具体实施方式
33.为使本实用新型解决的技术问题、采用的技术方案和达到的技术效果更加清楚,下面将结合附图对本实用新型实施例的技术方案做进一步的详细描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
34.在本实用新型的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内
部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
35.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
36.本实用新型提供了海洋平台用升降齿轮箱,如图1-3所示,该海洋平台用升降齿轮箱包括安装架1,以及设置于安装架1的升降齿轮箱本体2,升降齿轮箱本体2包括爬升齿轮组件21、第一ngw行星轮结构22、第二ngw行星轮结构23、扭力臂24和驱动机构25,爬升齿轮组件21包括连接架211和转动设置于连接架211的爬升齿轮212,安装架1与连接架211连接;第一ngw行星轮结构22包括第一行星架221、第一中心轴和第一内齿圈222,第一行星架221转动连接于第一中心轴,且第一行星架221与爬升齿轮212固定连接;第二ngw行星轮结构23包括第二行星架231、第二中心轴和第二内齿圈232,第二行星架231转动连接于第二中心轴,且第一中心轴与第二行星架231固定连接;扭力臂24用于连接第一内齿圈222和第二内齿圈232,且扭力臂24与安装架1连接;驱动机构25能带动第二中心轴转动;爬升齿轮组件21、第一ngw行星轮结构22、扭力臂24、第二ngw行星轮结构23和驱动机构25沿安装架1的高度方向自上而下依次设置。
37.该海洋平台用升降齿轮箱,如图1-3所示,驱动组件带动第二中心轴自转,使得第二ngw行星轮结构23运行并带动第二行星架231绕第二中心轴转动,第二行星架231与第一中心轴固定连接,从而带动第一中心轴自转,使得第一ngw行星轮结构22运行并带动第一行星架221绕第一中心轴转动,第一行星架221与爬升齿轮组件21的爬升齿轮212固定连接,从而带动爬升齿轮212自转并输出动力。通过设置爬升齿轮组件21、第一ngw行星轮结构22、扭力臂24、第二ngw行星轮结构23和驱动机构25沿安装架1的高度方向自上而下依次设置,扭力臂24用于连接第一内齿圈222和第二内齿圈232,且扭力臂24与安装架1连接,安装架1还与连接架211连接,使得相对于现有技术而言沿安装架的高度方向升降齿轮箱本体与安装架的两个连接位置之间的间距的跨度大,从而使得传递至扭力臂24与安装架1的连接处的扭矩力变小,从而对扭力臂24和安装架1之间的连接强度的要求较小,从而有效减小了安装架1发生扭转变形的风险,提高该海洋平台用升降齿轮箱的可靠性,且能有效减少用于连接扭力臂24和安装架1的连接件的数量,减小扭力臂24的体积,节省了成本。
38.其中,如图1和图4所示,安装架1间隔设有两个限位槽11,限位槽11沿安装架1的高度方向自下而上延伸,扭力臂24设有两个第一连接部241,两个第一连接部241与两个限位槽11一一对应设置,第一连接部241能插接于限位槽11。可以理解的是,第一连接部241是自下而上的插接于限位槽11,以沿安装架1的高度方向限定安装架1和扭力臂24的相对位置关系,然后再通过连接件将扭力臂24连接于安装架1,以沿高度方向完全固定了安装架1和扭力臂24的相对位置关系。在本实施例中,示例性的以安装架1和扭力臂24通过螺栓连接为例。
39.其中,如图1、图2和图4所示,海洋平台用升降齿轮箱还包括调节组件3,调节组件3
用于限定第一连接部241和限位槽11的侧壁之间的相对位置。具体地,将第一连接部241自下而上的插接于限位槽11,沿安装架1的高度方向限定安装架1和扭力臂24的相对位置关系,然后再通过调节组件3限定第一连接部241和限位槽11的侧壁之间的相对位置,从而完全限定了安装架1和扭力臂24的相对位置关系,进一步便于通过连接件将扭力臂24连接于安装架1;可以理解的是,第一连接部241和限位槽11是间隙配合,如此设置,使得安装架1能够装配不同规格的扭力臂24,增强了安装架1的使用性能。
40.具体地,如图1、图2、图4和图5所示,调节组件3包括调节板31,以及可拆卸连接于安装架1的连接板32,调节板31插接于限位槽11的侧壁与第一连接部241之间的间隙,且调节板31沿安装架1的高度方向的两端分别抵接于限位槽11的底壁和连接板32。如此设置,以实现通过调节板31限定第一连接部241和限位槽11的侧壁之间的相对位置,可以理解的是,调节板31与第一连接部241和限位槽11的侧壁均为接触配合或过盈配合。
41.进一步具体地,在本实施例中,如图1所示,每个第一连接部241对应两个调节组件3,两个调节组件3沿第一连接部241的长度方向间隔分布于第一连接部241的两侧。
42.具体地,如图1、图2、图4和图5所示,扭力臂24还包括相连接的第二连接部242和第三连接部243,第二连接部242与第一内齿圈222可拆卸连接,第三连接部243与第二内齿圈232可拆卸连接,两个第一连接部241均匀且间隔地连接于第二连接部242的外周面。如此设置,以实现通过扭力臂24连接第一内齿圈222和第二内齿圈232。
43.进一步具体地,扭力臂24的第一连接部241、第二连接部242和第三连接部243一体成型。如此设置,使得扭力臂24的结构强度好。
44.其中,如图1和图2所示,安装架1沿高度方向间隔设有第一安装孔12、第二安装孔13和第三安装孔14,连接架211包括第一连接架2111和第二连接架2112,第一连接架2111和第二连接架2112均与爬升齿轮212转动连接且分别位于爬升齿轮212沿轴向的两端,第一连接架2111插接于第一安装孔12且与安装架1可拆卸连接,第二连接架2112插接于第二安装孔13且与安装架1可拆卸连接,第一内齿圈222插接于第三安装孔14。具体地,第一连接架2111与爬升齿轮212通过轴承转动连接,第二连接架2112与爬升齿轮212通过轴承转动连接。可以理解的是,当第一连接部241插接于限位槽11且插接到位时,第一连接架2111插接于第一安装孔12,第二连接架2112插接于第二安装孔13,第一内齿圈222插接于第三安装孔14。
45.其中,如图1-3所示,第一ngw行星轮结构22还包括固定设置于第一中心轴的第一太阳轮224、多个沿周向间隔设置于第一行星架221的第一行星轮223,第一行星轮223与第一内齿圈222和第一太阳轮224均啮合。
46.其中,如图1-3所示,第二ngw行星轮结构23还包括固定设置于第二中心轴的第二太阳轮234、多个沿周向间隔设置于第二行星架231的第二行星轮233,第二行星轮233与第二内齿圈232和第二太阳轮234均啮合。
47.其中,如图1-3所示,驱动机构25包括驱动电机251和齿轮传动机构252,驱动电机251的输出轴与齿轮传动机构252的输入轴固定连接,齿轮传动机构252的输出轴与第二中心轴固定连接。具体地,如图1-3所示,驱动电机251的输出轴与齿轮传动机构252的输入轴固定连接,驱动电机251的输出轴带动齿轮传动机构252的输入轴绕自身中心轴线转动,从而第二太阳轮234转动,每个第二行星轮233均与第二内齿圈232和第二太阳轮234均啮合,
从而带动第二行星架231转动,第二行星架231与第一中心轴固定连接,从而带动固定连接于第一中心轴的第一太阳轮224自转,每个第一行星轮223均与第一内齿圈222和第一太阳轮224均啮合,从而带动第一行星架221转动,第一行星架221与爬升齿轮212固定连接,从而带动爬升齿轮212自转并输出动力。具体地,在本实施例中,齿轮传动机构252为四级齿轮传动机构。
48.其中,升降齿轮箱本体2的数量为多个,多个升降齿轮箱本体2阵列分布。在本实施例中,仅示例性的以安装架1设置一个升降齿轮箱本体2为例。
49.显然,本实用新型的上述实施例仅仅是为了清楚说明本实用新型所作的举例,而并非是对本实用新型的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1