一种双伺服电机驱动行星摆臂传送机构的制作方法
1.本实用新型涉及一种双伺服电机驱动行星摆臂传送机构,属于机床设备技术领域。
背景技术:
2.齿轮齿条传动是一种应用广泛的传动形式,具备传递动力大、传动效率高、寿命长、传动比恒定等优点。然而齿轮齿条传动只能在一条直线上往复传递载荷,无法传输任意方位的载荷;而且在应用齿轮齿条传动链时需要将二者事先装配妥当,不能做到齿轮与齿条的随时切入、脱离;一套齿轮机构只能驱动一组齿条组件及载荷运动,驱动多组齿条组件及载荷时需要多套齿轮驱动机构,造成场地和成本的浪费。
技术实现要素:
3.为了解决上述现有技术存在的不足,本实用新型提供了提供了一种双伺服电机驱动行星摆臂传送机构,实现了齿轮齿条轮齿啮合的随时切入与脱离,实现了一组驱动机构传送多组齿条组件的功能。
4.本实用新型解决其技术问题所采用的技术方案是:一种双伺服电机驱动行星摆臂传送机构,传送电机端部连接传送电机减速器,传送电机减速器安装在传送箱体上,传送电机减速器轴端设有齿轮c,齿轮c与摆臂驱动装置啮合,摆臂驱动装置的端部设有摆臂机构,摆臂机构端部间设有移动旋转轴,移动旋转轴上设有通过摆臂驱动装置与齿轮c啮合的驱动齿轮,摆臂驱动装置通过摆臂电机驱动摆臂机构摆动,使驱动齿轮随时切入与脱离啮合的齿条组件。
5.进一步的,驱动齿轮的数量为单个时,驱动齿轮能够通过摆臂驱动装置的驱动与一列平面内的多组不同高度的齿条组件啮合。
6.进一步的,驱动齿轮的数量为多个时,驱动齿轮能够通过摆臂驱动装置的驱动与一排平面内多组齿条组件啮合。
7.本实用新型的有益效果是:
8.1、该机构方便实用,实现了齿轮齿条啮合的随时切入与脱离。移动齿轮驱动机构至任意位置,或旋转齿轮驱动机构至任意角度后,可以与一列多组高度不同的齿条组件随时啮合,或在移动旋转轴上套设多组驱动齿轮,与一排多组高度不同的齿轮组件随时啮合。实现了一组驱动机构传送多组齿条组件的功能。
9.2、本实用新型设计合理、布局紧凑,节省了场地和成本。本实用新型隶属于黑龙江省自然科学基金杰出青年项目《立式铣车加工中心工作台拖换系统研究》,项目编号:jq2019e004。
附图说明
10.下面结合附图和具体实施方式对本实用新型进一步说明。
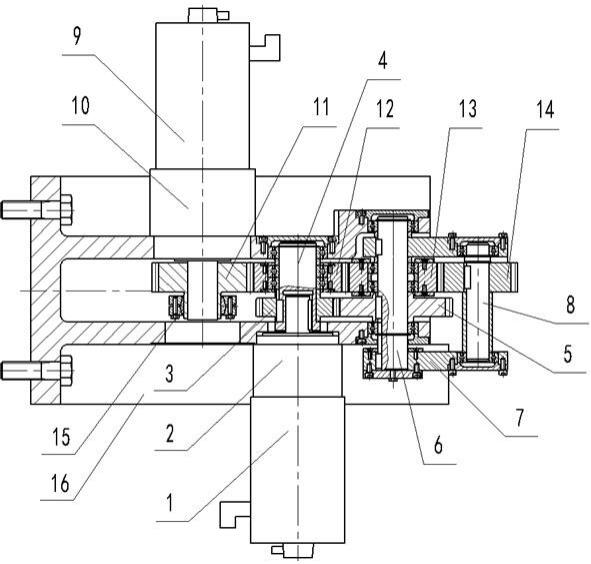
11.图1为本实用新型的结构剖视图。
12.图2为本实用新型的主视图。
13.图3为本实用新型的工作状态示意图。
14.图中标号:
15.1、摆臂电机,2、摆臂电机减速器,3、齿轮a,4、旋转轴a,5、齿轮b,6、旋转轴b,7、支架组件,8、移动旋转轴,9、传送电机,10、传送电机减速器,11、齿轮c,12、齿轮d,13、齿轮e,14、驱动齿轮,15、胀紧连接套,16、传送箱体,17、齿条组件。
具体实施方式
16.实施例1
17.如图1-3所示,一种双伺服电机驱动行星摆臂传送机构,传送电机9的输出端连接传送电机减速器10,传送电机减速器10固定安装在传送箱体16的左侧位置,传送电机减速器10输出轴通过胀紧联结套15固定连接有位于传送箱体16内的齿轮c11,齿轮c11与摆臂驱动装置啮合。
18.摆臂驱动装置由摆臂电机1、摆臂电机减速器2、齿轮a3、旋转轴a4、齿轮b5、旋转轴b6、齿轮d12和齿轮e13组成,摆臂电机1的输出端部连接摆臂电机减速器2,摆臂电机减速器2固定在传送箱体16的中部位置,摆臂电机减速器2的轴端通过键与套设的旋转轴a4固定连接,旋转轴a4为与传送箱体16内,通过固定在传送箱体16上的轴承支撑,旋转轴a4上同时套有与齿轮c11啮合的齿轮d12和齿轮a3,齿轮d12通过轴承套在旋转轴a4上,使其运转过程中互不干涉,齿轮a3通过键固定在旋转轴a4上,使其同步运转;传送箱体16内设有通过轴承安装的旋转轴b6,旋转轴b6位于旋转轴a4的右侧,旋转轴b6上设有与齿轮d12啮合的齿轮e13和与齿轮a3啮合的齿轮b5,齿轮e13通过轴承安装在旋转轴b6上,使其运转过程中互不干涉,齿轮b5通过键固定在旋转轴b6上,使其同步运转;摆臂电机1能通过齿轮a3驱动齿轮b5运转,传送电机9通过齿轮c11、齿轮d12驱动齿轮c13运转,齿轮b5与齿轮c13的运转速度、在轴承的作用下互不影响。旋转轴b6上固定有从传动箱体16右端伸出的摆臂机构,通过齿轮b5的转动控制摆臂机构的摆动。
19.摆臂机构由支架组件7、移动旋转轴8和驱动齿轮14,支架组件7的左端通过键与旋转轴b6固定连接,移动旋转轴8通过轴承安装在支架组件7的右侧端部间,驱动齿轮14通过键固定在移动旋转轴8上,并与齿轮e13啮合,传动电机9通过摆臂驱动装置中的齿轮e13与驱动齿轮14啮合,实现动力的传递。摆臂电机1通过摆臂驱动装置中的齿轮b5驱动摆臂机构摆动,使驱动齿轮14随时切入与脱离啮合的齿条组件17。
20.移动旋转轴8上的驱动齿轮14的数量为单个,驱动齿轮14能够通过摆臂驱动装置的驱动与一列平面内的多组不同高度的齿条组件17实现啮合,从而减少齿轮驱动机构的使用。
21.实施例2
22.一种双伺服电机驱动行星摆臂传送机构,传送电机9的输出端连接传送电机减速器10,传送电机减速器10固定安装在传送箱体16的左侧位置,传送电机减速器10轴端通过键固定有位于传送箱体16内的齿轮c11,齿轮c11与摆臂驱动装置啮合。
23.摆臂驱动装置由摆臂电机1、摆臂电机减速器2、齿轮a3、旋转轴a4、齿轮b5、旋转轴
b6、齿轮d12和齿轮e13组成,摆臂电机1的输出端部连接摆臂电机减速器2,摆臂电机减速器2固定在传送箱体16的中部位置,摆臂电机减速器2的轴端通过键与套设的旋转轴a4固定连接,旋转轴a4为与传送箱体16内,通过固定在传送箱体16上的轴承支撑,旋转轴a4上同时套有与齿轮c11啮合的齿轮d12和齿轮a3,齿轮d12通过轴承套在旋转轴a4上,使其运转过程中互不干涉,齿轮a3通过键固定在旋转轴a4上,使其同步运转;传送箱体16内设有通过轴承安装的旋转轴b6,旋转轴b6位于旋转轴a4的右侧,旋转轴b6上设有与齿轮d12啮合的齿轮e13和与齿轮a3啮合的齿轮b5,齿轮e13通过轴承安装在旋转轴b6上,使其运转过程中互不干涉,齿轮b5通过键固定在旋转轴b6上,使其同步运转;摆臂电机1能通过齿轮a3驱动齿轮b5运转,传送电机9通过齿轮c11、齿轮d12驱动齿轮c13运转,齿轮b5与齿轮c13的运转速度、在轴承的作用下互不影响。旋转轴b6上固定有从传动箱体16右端伸出的摆臂机构,通过齿轮b5的转动控制摆臂机构的摆动。
24.摆臂机构由支架组件7、移动旋转轴8和驱动齿轮14,支架组件7的左端通过键与旋转轴b6固定连接,移动旋转轴8通过轴承安装在支架组件7的右侧端部间,驱动齿轮14通过键固定在移动旋转轴8上,并与齿轮e13啮合,传动电机9通过摆臂驱动装置中的齿轮e13与驱动齿轮14啮合,实现动力的传递。摆臂电机1通过摆臂驱动装置中的齿轮b5驱动摆臂机构摆动,使驱动齿轮14随时切入与脱离啮合的齿条组件17。
25.移动旋转轴8上的驱动齿轮14的数量为多个,驱动齿轮14能够通过摆臂驱动装置的驱动与一排平面内的多组齿条组件17实现啮合,也可与一排内高度不同的先后不同时间进入的多组齿条组件17实现啮合,从而减少齿轮驱动机构的使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1