一种折叠摆臂安装结构的制作方法
本申请涉及巡检机器人升降装置的,尤其是涉及一种折叠摆臂安装结构。
背景技术:
1、在智能信息时代,能代替人工进行巡视检查的巡检机器人,已经广泛用于在各个行业领域了,挂轨式巡检机器人是一种以轨道作为巡检路径,悬挂在轨道下方,能沿轨道移动的巡检机器人。
2、现有技术中,挂轨式巡检机器人包括驱动装置和智能检测装置,有时为了扩大巡检范围,驱动装置包括用于在竖直方向上升降智能检测装置的升降组件,升降组件包括用于连接智能检测装置的伸缩套筒以及带动智能检测装置在竖直方向上升降智能检测装置的牵拉绳。
3、在应用过程中发现:伸缩套筒不仅会承担智能检测装置部分重力,在驱动装置通过伸缩套筒带动智能检测装置加速或急停时,即加速度发生较大变化,伸缩套筒会承受较大的作用力,容易导致伸缩套筒损伤变形甚至损坏。
技术实现思路
1、为了降低由于加速度导致升降组件产生损坏的概率,本申请提供一种折叠摆臂安装结构。
2、本申请提供的一种折叠摆臂安装结构采用如下的技术方案:
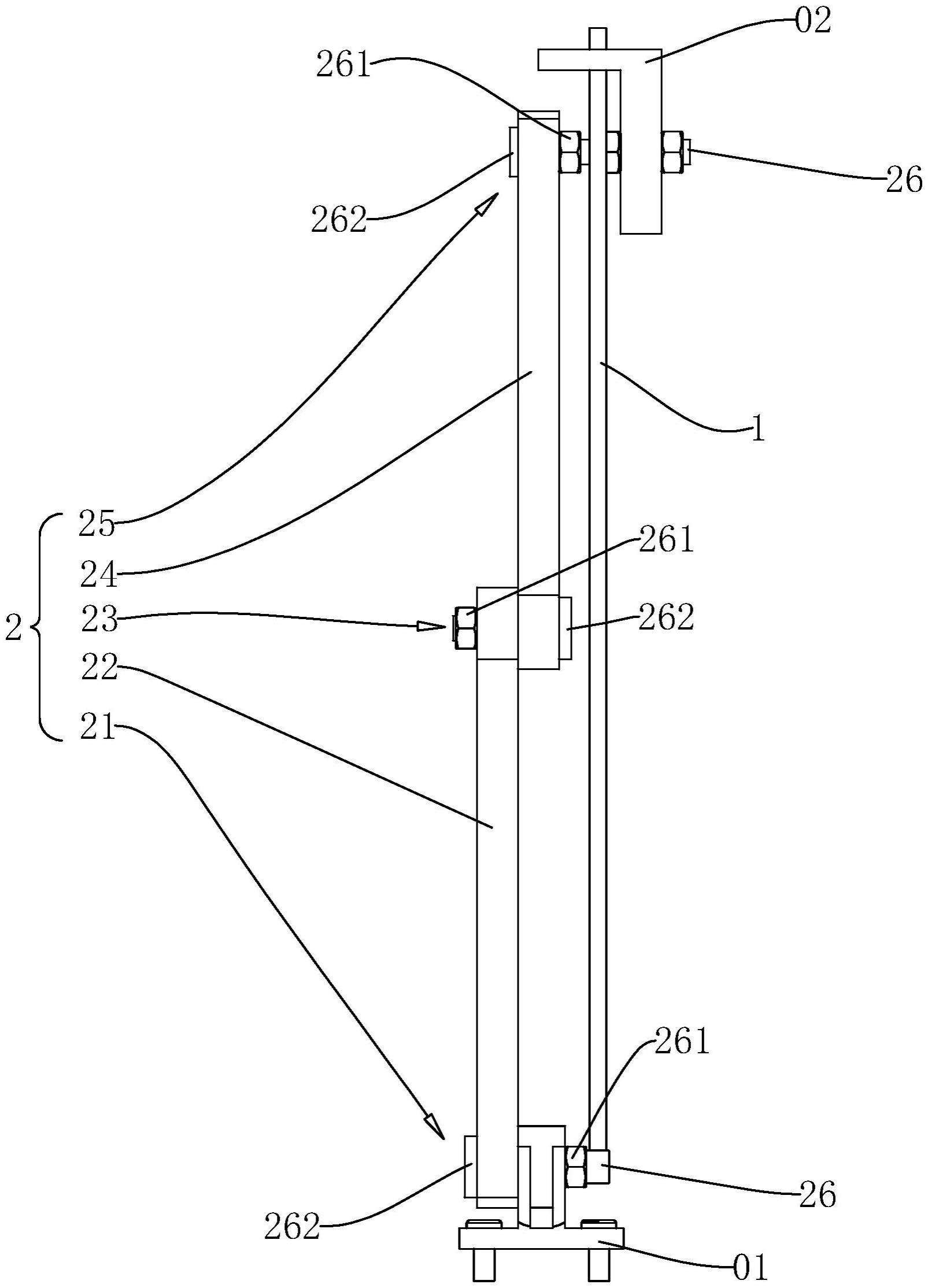
3、一种折叠摆臂安装结构,包括牵拉绳,沿所述牵拉绳的垂直部分设置有阻尼伸缩臂,所述阻尼伸缩臂包括固接在智能检测装置上的第一阻尼转轴、转动设置在所述第一阻尼转轴上的第一摆臂、转动设置在所述第一摆臂远离所述第一阻尼转轴一端上的阻尼铰接轴、转动设置在所述阻尼铰接轴上的第二摆臂以及转动设置在所述第二摆臂远离所述阻尼铰接轴一端上的第二阻尼转轴,所述第二阻尼转轴用于固接在驱动装置上。
4、通过采用上述技术方案,第一阻尼转轴使智能检测装置和第一摆臂之间成为阻尼铰接,阻尼铰接轴使第一摆臂和第二摆臂之间成为阻尼铰接,第二阻尼转轴使第二摆臂和驱动装置之间成为阻尼铰接,牵拉绳带动智能检测装置垂直移动,仅承担智能检测装置的重力作用,阻尼伸缩臂承担加速度变化产生的作用力,通过第一阻尼转轴、阻尼铰接轴和第二阻尼转轴提供的阻尼,降低安装部和第一摆臂之间、第一摆臂和第二摆臂之间、第二摆臂和安装壳之间,产生的共振振幅,降低因作用力即震动应力达到极限,导致阻尼伸缩臂损坏的概率,进而通过阻尼伸缩臂降低由于加速度导致升降组件产生损坏的概率。
5、可选的,所述第一阻尼转轴、所述阻尼铰接轴或所述第二阻尼转轴包括轴杆、套设在所述轴杆上的衬套、套设在所述轴杆上的多个阻尼密封圈以及螺纹连接在所述轴杆端部上的紧固螺母,所述衬套设置在所述阻尼密封圈之间,所述第一摆臂或所述第二摆臂与所述衬套采用过盈配合,所述衬套与所述轴杆采用间隙配合。
6、通过采用上述技术方案,衬套能减小第一摆臂或第二摆臂与轴杆之间的磨损,通过调整紧固螺母的紧固程度,以及阻尼密封圈的数量,能调整第一阻尼转轴、阻尼铰接轴或第二阻尼转轴的阻尼大小,阻尼密封圈提供阻尼的同时,能减小阻尼密封圈两侧之间的磨损。
7、可选的,在所述阻尼密封圈上设置有开口,所述阻尼密封圈靠近所述开口的外环壁上设置有通孔部,所述开口的两侧均设置所述通孔部,在两个所述通孔部之间设置有能闭合所述开口的固定螺栓。
8、通过采用上述技术方案,两个通孔部和固定螺栓配合,能打开或封闭开口,从而无需拆卸第一阻尼转轴、阻尼铰接轴或第二阻尼转轴就能更换阻尼密封圈,便于更换阻尼密封圈。
9、可选的,在所述轴杆远离所述紧固螺母的一端上设置有固定部,在所述轴杆上套设有多个耳板环,所述耳板环设置在所述固定部或所述紧固螺母靠近所述阻尼密封圈的一侧。
10、通过采用上述技术方案,耳板环能减小固定部或紧固螺母的磨损,同时便于转动紧固螺母。
11、可选的,在所述固定部远离所述轴杆的端面上设置有单向油嘴,在所述轴杆内开设有与所述单向油嘴连通的输油通道,在所述轴杆的圆周面上设置有与所述输油通道连通的输油口。
12、可选的,在所述衬套的内壁上开设有油槽,套设在所述轴杆上的所述衬套能盖住所述输油口。
13、通过采用上述技术方案,单向油嘴、输油通道、输油口和油槽,便于向轴杆和衬套之间输送润滑油,便于轴杆和衬套之间形成油膜,减少轴杆和衬套之间的磨损。
14、可选的,在所述阻尼密封圈的作用下,所述第一摆臂或所述第二摆臂与所述耳板环之间形成微型油室,所述第一摆臂和所述第二摆臂之间也形成微型油室。
15、通过采用上述技术方案,微型油室储存润滑油,能使轴杆和衬套之间长时间形成油膜。
16、可选的,所述第一阻尼转轴和所述第二阻尼转轴关于所述牵拉绳错位设置。
17、综上所述,本申请包括以下至少一种有益技术效果:
18、1.通过设置牵拉绳、阻尼伸缩臂、第一阻尼转轴、第一摆臂、阻尼铰接轴、第二摆臂和第二阻尼转轴,第一阻尼转轴使智能检测装置和第一摆臂之间成为阻尼铰接,阻尼铰接轴使第一摆臂和第二摆臂之间成为阻尼铰接,第二阻尼转轴使第二摆臂和驱动装置之间成为阻尼铰接,牵拉绳带动智能检测装置垂直移动,仅承担智能检测装置的重力作用,阻尼伸缩臂承担加速度变化产生的作用力,通过第一阻尼转轴、阻尼铰接轴和第二阻尼转轴提供的阻尼,降低安装部和第一摆臂之间、第一摆臂和第二摆臂之间、第二摆臂和安装壳之间,产生的共振振幅,降低因作用力即震动应力达到极限,导致阻尼伸缩臂损坏的概率,进而通过阻尼伸缩臂降低由于加速度导致升降组件产生损坏的概率;
19、2.通过设置开口、通孔部和固定螺栓,两个通孔部和固定螺栓配合,能打开或封闭开口,从而无需拆卸第一阻尼转轴、阻尼铰接轴或第二阻尼转轴就能更换阻尼密封圈,便于更换阻尼密封圈;
20、3.通过设置输油通道、输油口和单向油嘴,单向油嘴、输油通道、输油口和油槽,便于向轴杆和衬套之间输送润滑油,便于轴杆和衬套之间形成油膜,减少轴杆和衬套之间的磨损。
技术特征:
1.一种折叠摆臂安装结构,包括牵拉绳(1),其特征在于:沿所述牵拉绳(1)的垂直部分设置有阻尼伸缩臂(2),所述阻尼伸缩臂(2)包括固接在智能检测装置上的第一阻尼转轴(21)、转动设置在所述第一阻尼转轴(21)上的第一摆臂(22)、转动设置在所述第一摆臂(22)远离所述第一阻尼转轴(21)一端上的阻尼铰接轴(23)、转动设置在所述阻尼铰接轴(23)上的第二摆臂(24)以及转动设置在所述第二摆臂(24)远离所述阻尼铰接轴(23)一端上的第二阻尼转轴(25),所述第二阻尼转轴(25)用于固接在驱动装置上。
2.根据权利要求1所述的一种折叠摆臂安装结构,其特征在于:所述第一阻尼转轴(21)、所述阻尼铰接轴(23)或所述第二阻尼转轴(25)包括轴杆(26)、套设在所述轴杆(26)上的衬套(27)、套设在所述轴杆(26)上的多个阻尼密封圈(28)以及螺纹连接在所述轴杆(26)端部上的紧固螺母(261),所述衬套(27)设置在所述阻尼密封圈(28)之间。
3.根据权利要求2所述的一种折叠摆臂安装结构,其特征在于:在所述阻尼密封圈(28)上设置有开口(281),所述阻尼密封圈(28)靠近所述开口(281)的外环壁上设置有通孔部(282),所述开口(281)的两侧均设置所述通孔部(282),在两个所述通孔部(282)之间设置有能闭合所述开口(281)的固定螺栓(283)。
4.根据权利要求3所述的一种折叠摆臂安装结构,其特征在于:在所述轴杆(26)远离所述紧固螺母(261)的一端上设置有固定部(262),在所述轴杆(26)上套设有耳板环(29),所述耳板环(29)设置在所述固定部(262)或所述紧固螺母(261)靠近所述阻尼密封圈(28)的一侧。
5.根据权利要求4所述的一种折叠摆臂安装结构,其特征在于:在所述固定部(262)远离所述轴杆(26)的端面上设置有单向油嘴(3),在所述轴杆(26)内开设有与所述单向油嘴(3)连通的输油通道(263),在所述轴杆(26)的圆周面上设置有与所述输油通道(263)连通的输油口(264)。
6.根据权利要求5所述的一种折叠摆臂安装结构,其特征在于:所述第一摆臂(22)或所述第二摆臂(24)与所述衬套(27)采用过盈配合,所述衬套(27)与所述轴杆(26)采用间隙配合,在所述衬套(27)的内壁上开设有油槽,套设在所述轴杆(26)上的所述衬套(27)能盖住所述输油口(264)。
7.根据权利要求6所述的一种折叠摆臂安装结构,其特征在于:在所述阻尼密封圈(28)的作用下,所述第一摆臂(22)或所述第二摆臂(24)与所述耳板环(29)之间形成微型油室(4),所述第一摆臂(22)和所述第二摆臂(24)之间也形成微型油室(4)。
8.根据权利要求7所述的一种折叠摆臂安装结构,其特征在于:所述第一阻尼转轴(21)和所述第二阻尼转轴(25)关于所述牵拉绳(1)错位设置。
技术总结
本申请涉及巡检机器人升降装置的技术领域,尤其涉及一种折叠摆臂安装结构,其包括牵拉绳,沿所述牵拉绳的垂直部分设置有阻尼伸缩臂,所述阻尼伸缩臂包括固接在智能检测装置上的第一阻尼转轴、转动设置在所述第一阻尼转轴上的第一摆臂、转动设置在所述第一摆臂远离所述第一阻尼转轴一端上的阻尼铰接轴、转动设置在所述阻尼铰接轴上的第二摆臂以及转动设置在所述第二摆臂远离所述阻尼铰接轴一端上的第二阻尼转轴,所述第二阻尼转轴用于固接在驱动装置上。本申请具有降低由于加速度导致升降组件产生损坏的概率的效果。
技术研发人员:张晓勇,杜岩平,孙建,王兴越,马振华,苗学勇,周建,王凯,张瀚之,荆立伟,孙永文,张影,王志勇,晋文杰,吴依凡,马文营,肖万芳
受保护的技术使用者:北京潞电电气设备有限公司
技术研发日:20221125
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!