磁轴承装置及真空泵的制作方法
本发明涉及一种磁轴承装置及真空泵,特别涉及一种在使用磁轴承的悬浮系统中能够高灵敏度地测定旋转体的固有振动模式的磁轴承装置及真空泵。
背景技术:
1、随着近年来的电子学的发展,对存储器、集成电路等半导体的需求急剧增大。
2、这些半导体通过在纯度极高的半导体基板上掺杂杂质而赋予电性质、或利用蚀刻在半导体基板上形成微细的电路等来制造。
3、而且,为了避免空气中的尘埃等所造成的影响,这些作业需要在高真空状态的腔室内进行。该腔室的排气中一般使用真空泵,但特别地,从残留气体少、容易保养等方面出发,多使用作为真空泵中之一的涡轮分子泵。
4、另外,在半导体的制造工序中,有许多使各种工艺气体作用于半导体的基板的工序,涡轮分子泵不仅用于使腔室内成为真空,还用于从腔室内排出这些工艺气体。
5、进而,在电子显微镜等设备中,为了防止因粉尘等的存在引起的电子束的折射等,涡轮分子泵也用于使电子显微镜等的腔室内的环境成为高度的真空状态。
6、该涡轮分子泵具备磁轴承装置,以便对旋转体进行磁悬浮控制。而且,在该磁轴承装置中,在旋转体的加速运转中通过共振点时、在定速运转中发生了外部干扰时等,需要以高速且强的力进行旋转体的位置控制。
7、该旋转体的位置控制通过反馈控制进行。在反馈控制中,当旋转体发生振动时,通过与振动同步的磁力来抑制振动。因此,当反馈控制的设计不适当时,有时会发生振荡现象。为了防止该振荡现象,需要设定适当的滤波器,该滤波器事先掌握固有振动模式,切断与例如旋转体的固有振动频率对应的频带的信号等(参照专利文献1)。在该滤波器的设定不适当的情况下,有可能产生振动的增加、旋转体的故障的可能性、或者需要滤波器的重新调整。
8、现有技术文献
9、专利文献
10、专利文献1:日本特开平8-121477号公报
技术实现思路
1、发明要解决的课题
2、但是,该固有振动模式的数量很多。特别地,数量多的例子是转子轴的弯曲模式、涡轮分子泵的旋转叶片的固有振动模式。因此,难以事先掌握所有的固有振动模式。因此,由于事先无法掌握的固有振动模式,在旋转体的温度变化、形状变化、经时变化等系统的状态变化时,旋转体可能振荡。因此,需要尽可能高灵敏度地测定固有振动模式的方法。
3、另外,为了测定固有振动模式,需要提高信号的s/n比。特别地,在基于固有振动模式的振动分量的信号小于传感器分辨率的情况下,不能检测出固有振动模式。
4、以下基于附图来说明该现象。在此,图12中示出了基于磁轴承的控制系统的模型块的闭环传递函数增益特性。由图12可知,例如在传感器分辨率为虚线的情况下,由于示出固有振动的增益的峰值点a超过传感器分辨率,所以能够观测到,但是由于峰值点b的峰值小于传感器分辨率,所以不能观测到。
5、因此,在某种状态下,影响小的峰值点b的固有振动模式在如上述那样系统的状态发生了变化的情况下,也可能成为振荡的原因。
6、本发明是鉴于这样的以往的课题而完成的,其目的在于提供一种在使用磁轴承的悬浮系统中能够高灵敏度地测定旋转体的固有振动模式的磁轴承装置及真空泵。
7、用于解决课题的方案
8、因此,本发明(技术方案1)是一种磁轴承装置,具备:旋转体;磁轴承,利用磁力在空中悬浮支承该旋转体;以及磁轴承控制器,控制该磁轴承,其特征在于,在由所述磁轴承控制器进行的磁轴承控制中,具有以第一磁轴承控制增益进行所述旋转体的通常运转的第一运转模式、以及以第二磁轴承控制增益进行所述旋转体的暂时运转并测定所述磁轴承装置的固有振动频率的第二运转模式,所述第二磁轴承控制增益大于所述第一磁轴承控制增益。
9、第二运转模式时的磁轴承控制增益大于第一运转模式时。因此,与包括在磁轴承装置的输出中的固有振动模式对应的信号变大,信号的s/n比改善,能够高灵敏度地检测固有振动模式。
10、另外,本发明(技术方案2)是磁轴承装置的发明,其特征在于,所述第二运转模式的固有振动频率的测定在所述旋转体的旋转中进行。
11、第二运转模式的磁轴承控制增益的增加可以在旋转体的旋转中进行。在这种情况下,能够高灵敏度地测定包括陀螺效应等的影响的、旋转体的旋转时的固有振动模式。
12、进而,本发明(技术方案3)是磁轴承装置的发明,其特征在于,所述第二运转模式的固有振动频率的测定在所述旋转体的旋转的停止中进行。
13、第二运转模式的固有振动频率的测定能够在旋转体的停止中进行。而且,在像这样在旋转体的停止中进行了磁轴承控制增益的增加的情况下,万一由于磁轴承控制增益的增加而使控制不稳定化而着陆时,对旋转体或着陆轴承的冲击比旋转时小,安全性高。
14、另外,本发明(技术方案4)是磁轴承装置的发明,其特征在于,基于在所述第二运转模式下测定的固有振动频率,进行所述第一运转模式下的控制所述磁轴承的至少一个控制参数的调整。
15、由此,能够进行更最佳的滤波器设计,磁轴承控制更稳定。
16、另外,本发明(技术方案5)是磁轴承装置的发明,其特征在于,所述控制参数的调整在所述旋转体的旋转中进行。
17、通过在旋转体的旋转中进行参数的调整,能够高效地进行系统的运用。到为了调整参数而停止为止的时间没有浪费,到旋转体的额定运转为止的时间缩短。
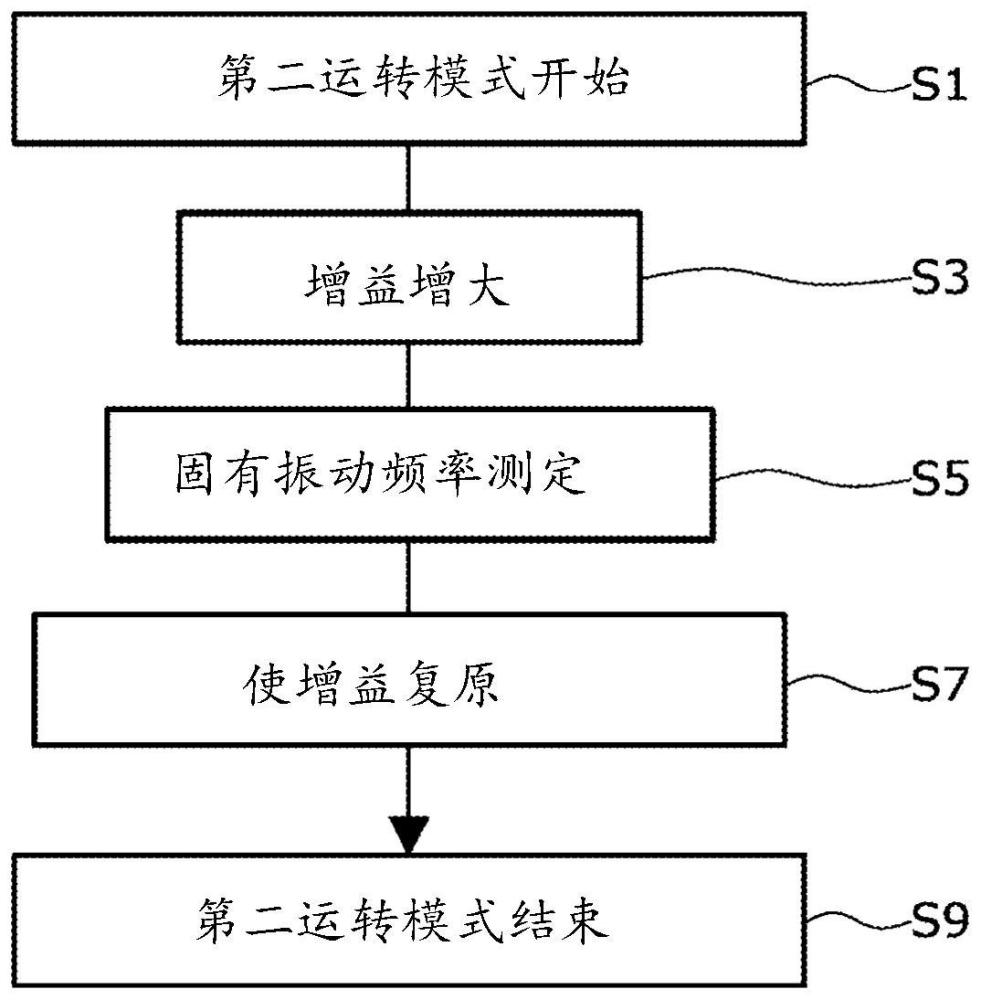
18、另外,本发明(技术方案6)是磁轴承装置的发明,构成为,所述第二运转模式具备:第一工序,使所述磁轴承控制的增益从所述第一磁轴承控制增益增大到所述第二磁轴承控制增益;第二工序,在所述第二磁轴承控制增益下测定所述固有振动频率;以及第三工序,在该第二工序中的测定完成时,从所述第二磁轴承控制增益返回到所述第一磁轴承控制增益。
19、能够高效地进行第二运转模式下的磁轴承控制增益的增大、磁轴承控制增益较大的阶段中的固有振动频率的测定、向第一运转模式的恢复。
20、进而,本发明(技术方案7)是磁轴承装置的发明,其特征在于,重复进行从所述第一运转模式向所述第二运转模式的转变和从所述第二运转模式向所述第一运转模式的转变。
21、通过重复进行从第一运转模式向第二运转模式的转变和从第二运转模式向第一运转模式的转变,能够测定多个状态下的固有振动模式,能够逐渐使控制稳定化。
22、进而,本发明(技术方案8)是磁轴承装置的发明,其特征在于,根据所述旋转体的转速来进行从所述第一运转模式向所述第二运转模式的转变。
23、能够根据旋转体的转速来逐渐使控制稳定化。特别地,能够对于伴随陀螺效应等转速的变化的固有振动频率的变化,实现更稳定的控制。
24、另外,本发明(技术方案9)是磁轴承装置的发明,其特征在于,在所述第二运转模式下,增大为了在所述第一运转模式下使所述磁轴承控制的相位前进而配设的滤波器的相位前进量。
25、在磁轴承控制中需要用于使相位前进的滤波器。利用该滤波器,使相位的前进量大于第一运转模式,由此,增大磁轴承控制增益。由此,在不增加多余的滤波器的个数的情况下提高测定灵敏度。因此,能够实现中央运算处理装置(cpu)的轻量化。
26、进而,本发明(技术方案10)是磁轴承装置的发明,其特征在于,在所述第二运转模式下,调整所述滤波器的控制参数以使得减弱为了在所述第一运转模式下降低所述磁轴承控制的增益而配设的滤波器的增益的降低量,或者删除所述滤波器。
27、在磁轴承控制中需要用于降低磁轴承控制增益的滤波器。通过在第二运转模式时将该滤波器调整为减弱增益的降低量或解除滤波器,从而增大磁轴承控制增益。通过解除滤波器等而增大磁轴承控制增益,从而在第二运转模式下容易观测固有振动模式。特别地,容易观测被该滤波器抑制的固有振动模式的频率变化。
28、另外,本发明(技术方案11)是磁轴承装置的发明,其特征在于,在所述第二运转模式的固有振动频率测定时,将在所述磁轴承控制器的内部生成的激振信号施加到所述磁轴承控制。
29、激振信号可以在磁轴承控制器的内部通过cpu等简单地生成。通过施加该激振信号,能够在第二运转模式下高灵敏度地测定固有振动模式,因此容易观测固有振动模式。另外,由于不需要外部的激振信号发生器或a/d变换装置,所以能够实现小型化、成本降低。
30、进而,本发明(技术方案12)是磁轴承装置的发明,其特征在于,在所述第二运转模式的固有振动频率测定时,不对所述磁轴承控制施加激振信号。
31、通过增大磁轴承控制增益,从而容易产生自激振动。通过测定该自激振动,能够测定固有振动模式。在该结构中,由于不需要外部的激振信号发生器或a/d变换装置、cpu中的激振信号的运算,所以能够实现小型化、成本降低。
32、进而,本发明(技术方案13)是磁轴承装置的发明,其特征在于,在所述第二运转模式中,使所述第二磁轴承控制增益在规定时间内逐渐增大,在检测到因该第二磁轴承控制增益的增大而产生的振荡时,或者在确认到该第二磁轴承控制增益达到了规定的控制增益量时,停止该第二磁轴承控制增益的增大。
33、在规定时间内逐渐增大第二磁轴承控制增益。然后,在检测到因第二磁轴承控制增益的增大而产生的振荡时,或者在确认到第二磁轴承控制增益达到了规定的控制增益量时,停止第二磁轴承控制增益的增大。由此,能够防止振荡的急剧增大而进行更安全的磁轴承控制。
34、进而,本发明(技术方案14)是真空泵的发明,其特征在于,搭载有技术方案1~13中任一项所述的磁轴承装置。
35、在真空泵中具备旋转体等固有振动模式的数量较多,容易产生由其固有振动引起的振荡,但由于能够高精度地测定固有振动频率,所以对抑制振荡有效。
36、发明效果如以上说明的那样,根据本发明,在磁轴承控制中具有以第一磁轴承控制增益进行旋转体的通常运转的第一运转模式、以及以第二磁轴承控制增益进行旋转体的暂时运转并测定磁轴承装置的固有振动频率的第二运转模式,构成为第二磁轴承控制增益大于第一磁轴承控制增益,因此,能够高灵敏度地检测固有振动模式。其结果,能够实现更最佳的滤波器设计,导致控制的稳定化。
- 还没有人留言评论。精彩留言会获得点赞!