一种可调节遥感测量支撑结构的制作方法
本发明涉及遥感测量,尤其涉及一种可调节遥感测量支撑结构。
背景技术:
1、遥感是一种在远距离和不接触目标的条件下,通过传感器或是遥感器对物体的电磁波进行探测的技术;遥感技术根据工作平台层面分地面遥感、航空遥感和航天遥感,通过从地面到空中,甚至到太空,对地球上的植物、农作物、气象和军事等领域进行观测并研究,促进各个领域的发展。
2、随着航天事业的发展,航天遥感技术发展越来越好,可以从太空中宏观的观测,但是如果使比较小型的企业和个人想要通过遥感测量得到一些数据,很难得到通过航天遥感和航空遥感的机会,只能够通过地面遥感的方式去进行测量;地面遥感通常是将遥感器或者传感器置于地面平台上,也可以直接安装在支撑架上进行探测。
3、现有支撑结构中,如公告号为cn216813514u的专利公开了一种可调节的遥感测量支撑结构,包括工作台,所述工作台下设有支撑稳定装置,所述工作台上设有角度调节装置,所述工作台侧边对称设有加固装置。在对工作台角度进行调节时,分别根据实际情况旋转调节螺杆,来达到不一样的长度,实现工作台的角度的改变。
4、但是,由于探测的地区多为山地和野外,地势高低不平,现有技术中支撑稳定装置很难在地势不平的地面进行支撑,且需要手动调节支撑架各支腿的高度,但是探测时,需要移动,每次一移动就需要重新手动调节各支腿的高度,在测绘中调节各支腿高度占用大量的时间和精力。
技术实现思路
1、本发明的主要目的是提出一种可调节遥感测量支撑结构,旨在解决上述技术问题。
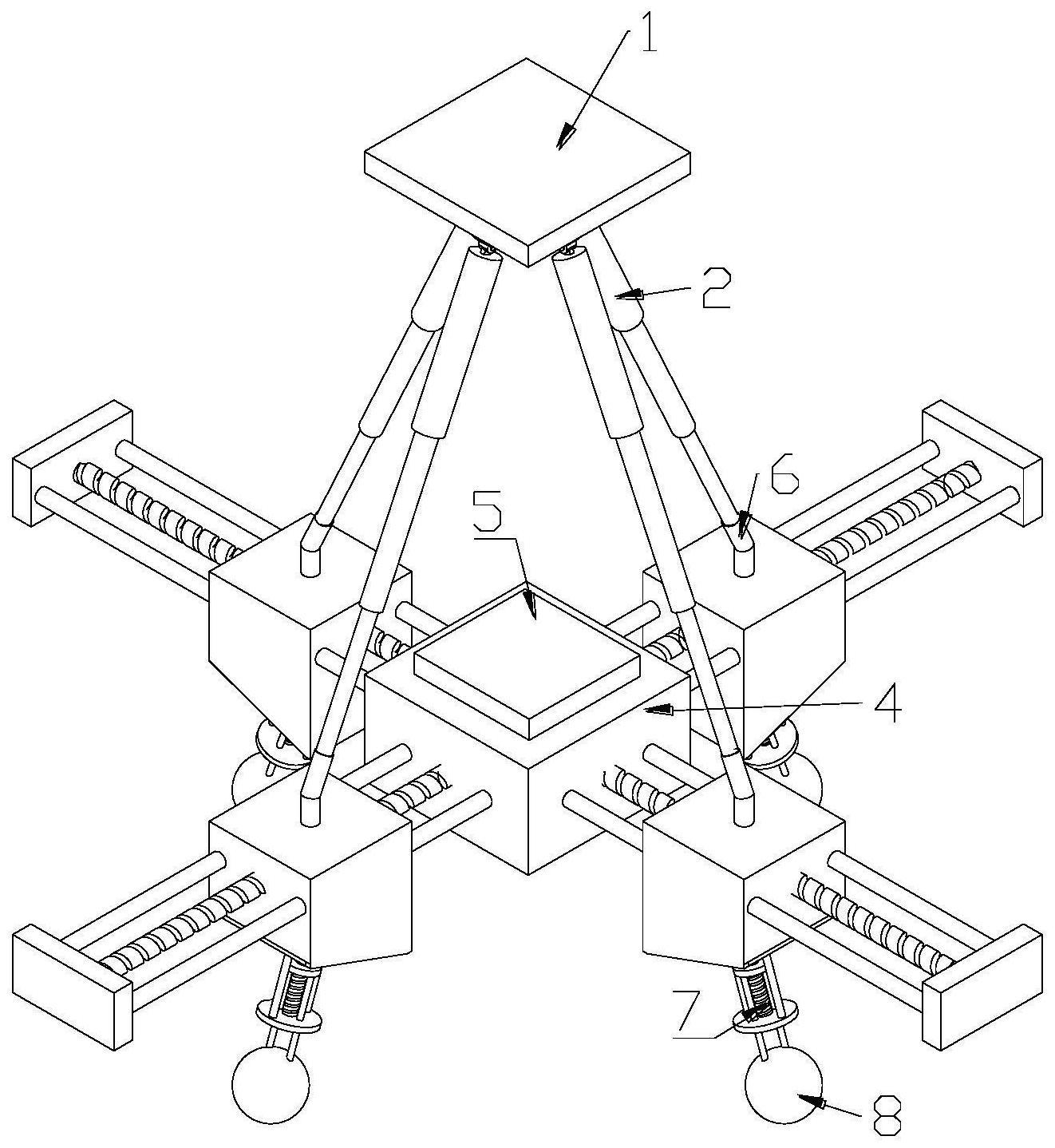
2、为实现上述目的,本发明提出一种可调节遥感测量支撑结构,包括遥感设备安装台,遥感设备安装台的下方经转动轴转动连接有四脚架;四脚架的下方设置有调平箱;调平箱的上方中部固定连接有水平传感器和plc控制器;水平传感器和plc控制器电性连接;调平箱上固定连接有若干个支腿连接件;支腿连接件与四脚架的支腿相对应;支腿连接件与四脚架的支腿插嵌连接;调平箱的下端固定连接有若干个调节组件;调节组件的下端固定连接有球形支腿;调节组件与plc控制器电性连接,调节组件用于调节球形支腿的高度。
3、优选的,四脚架和遥感设备安装台之间设置有支撑环;支撑环分别与四脚架和遥感设备安装台转动连接;支撑环套在转动轴的外部。
4、优选的,调节组件倾斜设置,调节组件的上端靠近水平传感器,调节组件的下端远离水平传感器。
5、优选的,调平箱包括主箱体和移动箱;主箱体设置在四脚架的正下方位置处;所述水平传感器和plc控制器固接在主箱体的顶面上;所述移动箱分布在主箱体的四侧位置处;移动箱的上部贯穿设置有二号丝杆,且移动箱与二号丝杆之间螺纹配合传动;二号丝杆的一端与主箱体的外壁转动连接,二号丝杆的另一端转动连接有二号连接板;二号连接板与主箱体的外壁之间固定连接有二号固定杆;二号固定杆滑动贯穿移动箱;在所述主箱体上设置有驱动装置用于驱动所述二号丝杆旋转;所述调节组件安装在移动箱的下方。
6、优选的,在所述移动箱的下方固定连接有斜面安装板;所述调节组件包括第一电机和一号丝杆;所述第一电机设置在移动箱内部且固接在斜面安装板上,该第一电机与所述plc控制器控制连接;在所述斜面安装板的下方固定连接有若干个一号固定杆;一号固定杆远离斜面安装板的一端固定连接有一号连接板;所述一号丝杆设置在斜面安装板和一号连接板之间;且第一电机的输出端与一号丝杆固定连接;一号丝杆上螺纹连接有滑块;滑块上固定连接有若干个移动杆;移动杆贯穿一号连接板,且移动杆与一号连接板滑动配合;移动杆的下端与球形支腿固定连接。
7、优选的,所述驱动装置包括设置在固接在主箱体下方的第二电机、以及设置在主体箱内部的传动组件;第二电机的输出端与传动组件连接,传动组件与二号丝杆传动连接,第二电机与所述plc控制器电性连接。
8、优选的,所述传动组件包括主齿轮和二号齿轮;主齿轮与第二电机输出轴连接;二号齿轮与所述二号丝杆固定连接;二号齿轮与主齿轮垂直布置;主齿轮与二号齿轮传动连接。
9、优选的,在所述主齿轮与二号齿轮之间设置有传动齿轮,该传动齿轮与主箱体的底壁转动连接,且传动齿轮与主齿轮在同一平面;传动齿轮分别与主齿轮、二号齿轮啮合传动。
10、优选的,传动齿轮和主齿轮的齿数小于二号齿轮的齿数。
11、优选的,所述支腿连接件固定设置在所述移动箱的顶面上。
12、由于采用了上述技术方案,本发明的有益效果如下:
13、(1)本发明通过将调平箱置于地面,打开水平传感器;当水平传感器感应到调平箱没有处于水平位置时,将电信号传递给plc控制器;plc控制器启动较低的一端的调节组件;调节组件移动使调平箱较低的一端升高;直至水平传感器感应到调平箱处于水平位置后调节组件保持不动;此时调平箱处于水平位置;将四脚架的支腿分别插入对应的支腿连接件;使四脚架固定;本发明所提供的支撑结构适用于野外和山地高低不平的路面,该装置可以进行自动调平,无需手动调节减少人工操作量。
14、(2)通过利用支撑环可以更好地支撑遥感设备安装台,保证遥感设备安装台的稳定性,更好地支撑遥感测量设备;本发明中球形支腿为球形,更适合在山地和野外这种地形进行支撑。
15、(3)本发明通过当水平传感器感应到调平箱没有处于水平位置时,将电信号传递给plc控制器;plc控制器启动较低的一端的第一电机;第一电机通过一号丝杆带动滑块在斜面安装板和一号连接板之间移动,对球形支腿的高度进行调节;无需人工进行调节,减少人工操作量;由于四角架有不同的型号和大小,每个四角架能够打开的角度也是不同的;通过转动二号丝杆,可以调节移动箱与主箱体之间的距离,同时将支腿连接件固定设置在所述移动箱的顶面上;可以根据四脚架打开的角度对移动箱的位置进行调节;提高与不同四脚架的适配性;
16、(4)本发明中第二电机带动主齿轮转动,由于设置有传动齿轮,主齿轮与二号齿轮在不接触的情况下通过传动齿轮进行传动,可以更换不同齿数的传动齿轮,获得不同的传动比,达到控制二号丝杆的转速的目的,进而控制移动箱的运动速度。
17、(5)本发明中传动齿轮、主齿轮小于二号齿轮的齿数,使二号丝杆的转动速度小于第二电机的转动速度,实现了减速效果。
技术特征:
1.一种可调节遥感测量支撑结构,包括遥感设备安装台(1),其特征在于:遥感设备安装台(1)的下方经转动轴转动连接有四脚架(2);四脚架(2)的下方设置有调平箱(4);调平箱(4)的上方中部固定连接有水平传感器(5)和plc控制器;水平传感器(5)和plc控制器电性连接;调平箱(4)上固定连接有若干个支腿连接件(6);支腿连接件(6)与四脚架(2)的支腿相对应;支腿连接件(6)与四脚架(2)的支腿插嵌连接;调平箱(4)的下端固定连接有若干个调节组件(7);调节组件(7)的下端固定连接有球形支腿(8);调节组件(7)与plc控制器电性连接,调节组件(7)用于调节球形支腿(8)的高度。
2.如权利要求1所述的一种可调节遥感测量支撑结构,其特征在于:四脚架(2)和遥感设备安装台(1)之间设置有支撑环(3);支撑环(3)分别与四脚架(2)和遥感设备安装台(1)转动连接;支撑环(3)套在转动轴的外部。
3.如权利要求1所述的一种可调节遥感测量支撑结构,其特征在于:调节组件(7)倾斜设置,调节组件(7)的上端靠近水平传感器(5),调节组件(7)的下端远离水平传感器(5)。
4.如权利要求1所述的一种可调节遥感测量支撑结构,其特征在于:调平箱(4)包括主箱体(41)和移动箱(42);主箱体(41)设置在四脚架(2)的正下方位置处;所述水平传感器(5)和plc控制器固接在主箱体(41)的顶面上;所述移动箱(42)分布在主箱体(41)的四侧位置处;移动箱(42)的上部贯穿设置有二号丝杆(43),且移动箱(42)与二号丝杆(43)之间螺纹配合传动;二号丝杆(43)的一端与主箱体(41)的外壁转动连接,二号丝杆(43)的另一端转动连接有二号连接板(44);二号连接板(44)与主箱体(41)的外壁之间固定连接有二号固定杆(45);二号固定杆(45)滑动贯穿移动箱(42);在所述主箱体(41)上设置有驱动装置用于驱动所述二号丝杆(43)旋转;所述调节组件(7)安装在移动箱(42)的下方。
5.如权利要求4所述的一种可调节遥感测量支撑结构,其特征在于:在所述移动箱(42)的下方固定连接有斜面安装板(71);所述调节组件(7)包括第一电机(72)和一号丝杆(75);所述第一电机(72)设置在移动箱(42)内部且固接在斜面安装板(71)上,该第一电机(72)与所述plc控制器控制连接;在所述斜面安装板(71)的下方固定连接有若干个一号固定杆(73);一号固定杆(73)远离斜面安装板(71)的一端固定连接有一号连接板(74);所述一号丝杆(75)设置在斜面安装板(71)和一号连接板(74)之间;且第一电机(72)的输出端与一号丝杆(75)固定连接;一号丝杆(75)上螺纹连接有滑块(76);滑块(76)上固定连接有若干个移动杆(77);移动杆(77)贯穿一号连接板(74),且移动杆(77)与一号连接板(74)滑动配合;移动杆(77)的下端与球形支腿(8)固定连接。
6.如权利要求4所述的一种可调节遥感测量支撑结构,其特征在于:所述驱动装置包括设置在固接在主箱体(41)下方的第二电机(9)、以及设置在主体箱(41)内部的传动组件(10);第二电机(9)的输出端与传动组件(10)连接,传动组件(10)与二号丝杆(43)传动连接,第二电机(9)与所述plc控制器电性连接。
7.如权利要求6所述的一种可调节遥感测量支撑结构,其特征在于:所述传动组件(10)包括主齿轮(101)和二号齿轮(102);主齿轮(101)与第二电机(9)输出轴连接;二号齿轮(102)与所述二号丝杆(43)固定连接;二号齿轮(102)与主齿轮(101)垂直布置;主齿轮(101)与二号齿轮(102)传动连接。
8.如权利要求7所述的一种可调节遥感测量支撑结构,其特征在于:在所述主齿轮(101)与二号齿轮(102)之间设置有传动齿轮(1012),该传动齿轮(1012)与主箱体(41)的底壁转动连接,且传动齿轮(1012)与主齿轮(101)在同一平面;传动齿轮(1012)分别与主齿轮(101)、二号齿轮(102)啮合传动。
9.如权利要求8所述的一种可调节遥感测量支撑结构,其特征在于:传动齿轮(1012)和主齿轮(101)的齿数小于二号齿轮(102)的齿数。
10.如权利要求4所述的一种可调节遥感测量支撑结构,其特征在于:所述支腿连接件(6)固定设置在所述移动箱(42)的顶面上。
技术总结
一种可调节遥感测量支撑结构,包括遥感设备安装台,遥感设备安装台的下方经转动轴转动连接有四脚架;四脚架的下方设置有调平箱;调平箱的上方中部固定连接有水平传感器和PLC控制器;水平传感器和PLC控制器电性连接;调平箱上固定连接有若干个支腿连接件;支腿连接件与四脚架的支腿相对应;支腿连接件与四脚架的支腿插嵌连接;调平箱的下端固定连接有若干个调节组件;调节组件的下端固定连接有球形支腿;调节组件与PLC控制器电性连接,调节组件用于调节球形支腿的高度。本发明所提供的支撑结构适用于野外和山地高低不平的路面,该装置可以进行自动调平,无需手动调节减少人工操作量。
技术研发人员:何祖建,罗刚
受保护的技术使用者:中国电建集团贵阳勘测设计研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!